基于三维场景的电力设施安全区域预警方法
2015-12-15 07:47麻立群潘坚跃张元歆
电子设计工程 2015年10期
彭 斌,麻立群,潘坚跃,张元歆,陈 希
(1.国家电网浙江临安市供电公司 浙江 临安311300;2.国家电网杭州供电公司 浙江 杭州 310009;3.西安交通大学 陕西 西安710049)
基于三维场景的电力设施安全区域预警方法
彭 斌1,麻立群1,潘坚跃2,张元歆3,陈 希3
(1.国家电网浙江临安市供电公司 浙江 临安311300;2.国家电网杭州供电公司 浙江 杭州 310009;3.西安交通大学 陕西 西安710049)
在电力设施现场作业过程中,需要监控在现场中的工作人员的位置用来对人员目标进行安全预警。本文提出了一种基于三维场景标定技术的电力设施作业现场人员目标安全预警方法,可以对于电力设施监控系统摄到的监控图像视频进行分析。从电力设施作业现场以及监控视频中提取先验标定数据,根据先验标定数据进行数据拟合,完成对电力设施作业现场的三维场景建模,再根据人员目标的识别结果从视频中计算人员目标的实际位置,与预先设定好的安全区域预警参数进行对比,确定当前现场状态。该方法经过现场验证,可以稳定的计算人员目标位置,提出准确安全预警信号。
电力设施,视频监控,三维场景,标定,预警
现代化社会的电力系统是一个从发电、输电到配电、用电的庞大系统,其中任何一个环节出现问题都有可能导致大面积的电力供应缺失,影响正常的生产生活秩序。这需要我们时刻对电力系统的工作状态进行监控,在出现故障时及时修复。在电力设施检修过程中,容易在作业现场出现危险情况,如线路脱落。此时,一旦工作人员接近,就会产生安全隐患。视频监控系统可以用来预防电力设施作业现场中可能出现的危险情况。监控系统对作业现场进行拍摄,将监控画面传回后方监控中心,工作人员可以进行监控。但是人工监控费时费力,还会出现漏检。
在少量应用了简单图像处理算法的电力设施监控系统中,对人员目标的监控停留在解决少量目标、分类容易的情况[1-2],并且一旦检测到人员目标即会报警[3],无法真正的对人员目标的行为进行监控。基于对监控图像进行背景图像分析,然后进行背景差分和模板匹配,王永灿等人提出了一种对接近高压输电线杆塔附近的人员目标进行监控的方法[4],但是该方法只是识别人员目标,而并不会对人员目标的位置做出分析。
文中应用三维场景标定技术,设计了一种基于电力设施作业现场标定数据的人员目标位置计算方法,使得监控系统能够从二维监控图像中分析在电力设施作业现场中人员目标当前位置,和预先确定的安全预警区域参数进行对比,从而确定当前现场中是否有人员目标处于危险位置,从而稳定地提出安全预警信号。
1 电力设施作业现场的监控场景
针对不同的施工作业状态,电力设施图像视频监控系统需要设定不同的阈值来监测当前的状态。首先根据监控场景来进行标定,建立二维监控画面和三维实际场景之间的对应关系,根据该对应关系计算目标的位置参数,从而得到稳定的依据来判定是否给出安全预警信号。要实现三维场景的标定计算,可以采用双摄像机的双目视觉系统[5]和单摄像机的单目视觉系统。双目视觉系统需要两台摄像机,经济成本较高,是单目系统的两倍。双目系统的架设难度和标定的准确度和复杂度都很高。采用单目视觉系统,虽然会丢失纵深信息,并且系统的鲁棒性不高,但可通过采集周围环境信息、周边物体的距离信息,并设计鲁棒性较高的算法来弥补不足。本文设计的成像技术方法是基于单目视觉系统的。
1.1 单摄像机监控成像系统
单目视觉系统中只有一个摄像机。三维场景通过摄像机变为二维平面图像,三维场景的纵向信息丢失。单目视觉系统中的摄像机所记录的亮度信息是一个3D场景的透视投影,遵从于透视投影模型,即针孔模型[6],如图1所示。
图1中的O点是相机镜头,光线从O点进入,在相机成像面上成像。对于成像面上的像点B,它可能是空间中A点在成像面上的投影,也可能是射线BO的延长线上任意一点在成像面上的投影。因此A点的位置不能确定,只知道它在射线BO的延长线上。要确定A点的三维坐标,必须要其他已知数据,如对相机进行标定等。
1.2 监控场景的分析
通过架设在变电站内的监控摄像机所拍摄到的监控场景如图3所示,道路两边的电力设施通常电压都很高,工作人员不能用手直接接触的。并且这些变电设施很少需要更换或维修操作,对电力系统工作人员来说,更多的是对于这些变电设施的巡检工作。在巡检过程中,一旦工作人员离开道路靠近变电设施,就有可能产生安全隐患,因此针对电力设施作业过程中人员目标的监控主要集中在对人员目标位置参数的获取。
2 人员目标位置的计算
根据1.1的分析,监控摄像机所拍摄到的图像只包含了监控场景的二维信息,在纵深方向上的三维信息丢失了。为了弥补丢失的信息,建立监控图像二维坐标和实际监控场景三维坐标之间的对应关系,需要在计算之前先获取实际监控场景中的一些标志物的位置和尺寸数据来进行标定。在现有的计算机视觉计算理论体系中,常用的方法如Zhang等人提出的标定法[7],需要获取监控场景中已有目标的位置和高度参数、摄像机自身的焦距和CCD尺寸参数,通过基于摄像机针孔模型的几何光路分析,完成对侵入目标参数的计算。
如果在计算之前,事先对监控摄像机所拍摄的监控场景做出标定,获取足够多的先验数据,基于这些数据完成图像二维坐标和实际场景三维坐标之间对应关系的建立,就可以摆脱摄像机内部参数的标定工作,因为这种标定通常较为困难。通过这种方法计算人员目标的位置参数,先验标定数据获取的越多,计算结果的精度就会越高。

图2 变电站内监控场景图Fig.2 Surveillance image of an electricity substation
2.1 先验标定数据的获取
在如图2所示的监控场景中,人员目标的活动范围限定在路面上,因此需要对于整个路面所在的二维平面做出标定。
如图3所示,从路面的最近端到最远端,每隔一段距离就进行一次标定物的摆放,摆放分为左右两个位置,两个位置之间的距离是固定的。每次摆放都进行标定图片的拍摄。用激光测距仪测出每一个标志物摆放位置到监控摄像机的距离,将其作为标定先验数据记录下来。针对每一张标定图片,其中标志物的图像x坐标和图像y坐标都需要手动从标定图片中获取,这些像素坐标也要作为先验数据。

图3 标定标志物的摆放示意图Fig.3 Locations of markers for calibration
2.2 人员目标位置参数的计算
基于2.1中获取的先验标定数据,首先建立图像二维坐标和实际场景三维坐标之间的对应关系,也就是进行三维场景建模,然后根据该模型计算人员目标的位置参数。
在如图2所示的监控场景中,需要计算的位置参数包括两个:一是人员目标距离监控摄像机的水平距离L,二是人员目标距离道路两旁电力设施的距离M。根据L和M的计算结果,和实现确定好的安全区域预警参数进行比较,就可以判断出当前人员目标是否出现危险位置。
在本例中,如图3所示,将每一次标定物所摆放位置的图像坐标y和实际标定物距离监控摄像机的水平距离对应起来,如表1所示。然后根据表1所示的数据,将所有的标定物图像坐标y和标定物水平距离L对应起来,进行数据拟合,得到L-y曲线,如图4所示。一旦得到L-y曲线,当获知了人员目标在二维监控图像上的像素坐标y之后,便可以计算出人员目标在实际三维场景中距离监控摄像机的距离L。
由于监控场景中各个电力设施的位置基本上是固定不变的,因此可以通过人员目标在图像上面和电力设施之间图像坐标x的差来计算人员目标距离电力设施的远近M。事实上,距离监控摄像机越远,相同的x坐标差代表着更长的距离,因此首先需要对不同远近程度下,图像x坐标所代表的实际长度做出标定。
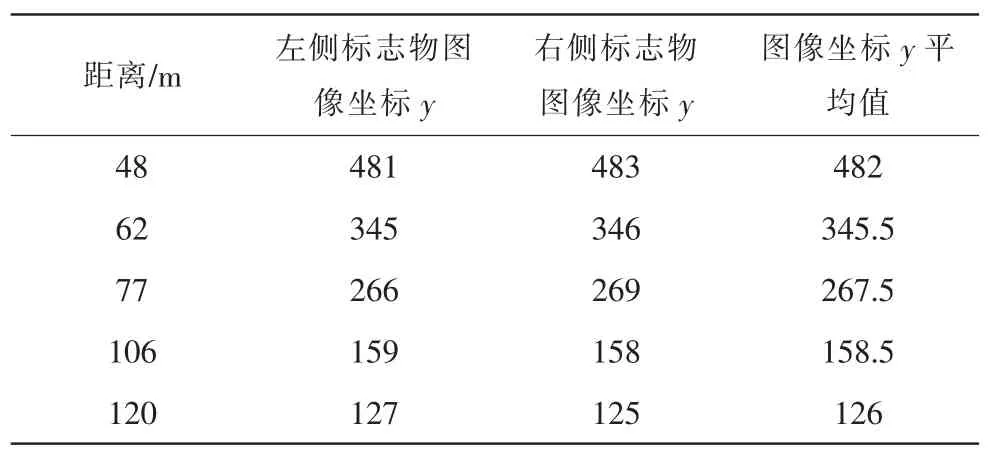
表1 L-y对应关系表Tab.1 Correspondence between L-y
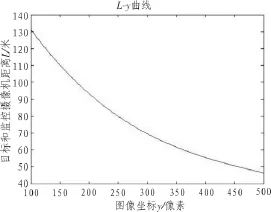
图4 循Fig.4 Schematic drawing of L-y curve
在图3所示的标定物摆放过程中,左右两个位置之间的距离固定为4.5 m,可以根据这个距离来标定不同远近下图像x坐标所代表的实际长度。首先从图像上获取各个不同的距离下标定物在图像上的x坐标,如表2所示。表2中,每一个距离上图像x坐标差值除以左右两个标定物之间的实际距离,便可以得到在某一个远近下1 m所代表的图像像素数量P,将所有的P和标定物水平距离L对应起来,进行数据拟合,可以得到P-L曲线,如图5所示。根据P-L曲线,当已知人员目标距离监控摄像机的水平距离时,便可以计算出在那样一个距离上一个图像像素所代表的实际长度是多少,然后根据人员目标的图像坐标便可以计算出人员目标距离道路两旁电力设施的远近M。
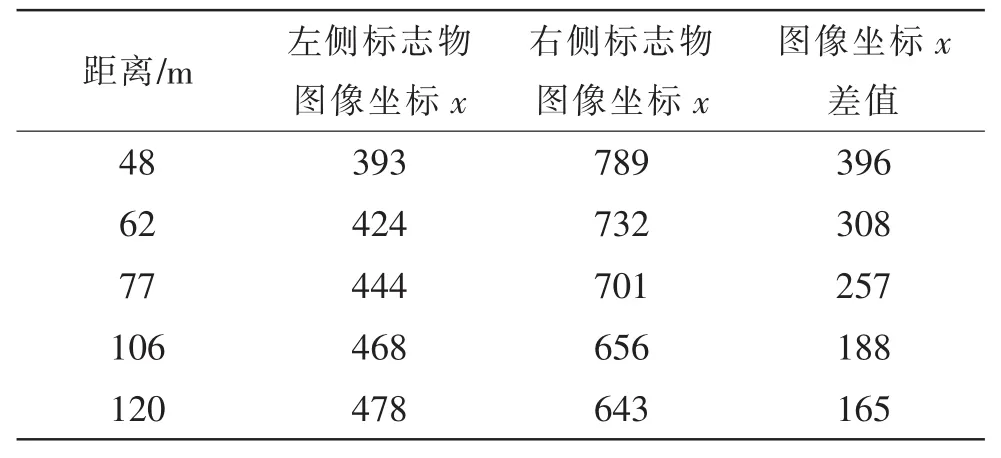
表2 P-L对应关系表Tab.2 Correspondence between P-L
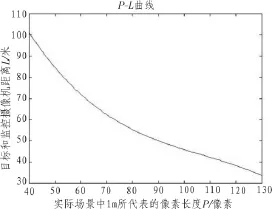
图5 P-L曲线示意图Fig.5 Schematic drawing of P-L curve
2.3 人员目标的安全区域预警
通过图6来说明如何应用2.2中的计算结果来进行针对变电场内监控场景的人员目标安全预警判定。左上角和右上角用红线框住标出的部分区域设定为危险区域,一旦人员目标进入即会发出安全预警信号。图6中轴线左侧的区域距离中轴线的距离数值设定为负值,右侧设定为正值。所划定的危险区域为距离摄像机水平距离为大于38 m的区域,同时距离中轴线小于-2 m或大于4.5 m的区域。针对图6中的3个人员目标,从左至右分别标为A、B、C,他们的位置参数计算结果如表3所示。从计算结果中看出,3个人员目标均未进入危险区域。

图6 人员目标安全区域预警示意图Fig.6 Schematic drawing of safety region for staff
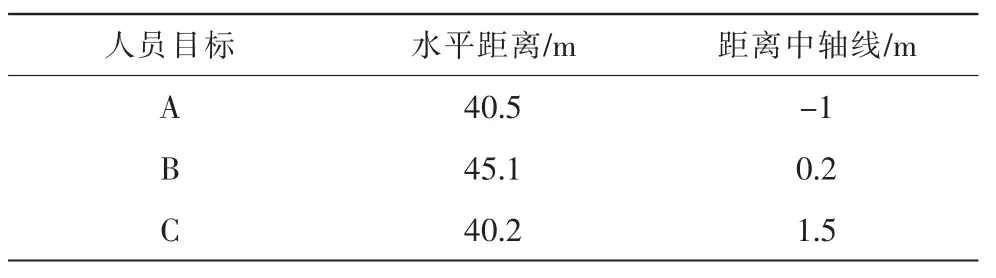
表3 人员目标安全区域预警结果表Tab.3 Safety warning results for staff
3 结论
文中提出了基于先验标定数据的单摄像机电力设施作业现场的安全区域预警方法。该方法首先对电力设施作业现场进行标定,获取足够的先验标定数据,然后基于先验标定数据完成二维图像坐标和三维场景坐标之间对应关系的建立,计算电力设施作业现场内人员目标的位置参数,根据预先确定的电力设施作业现场安全区域参数,判断当前电力设施作业现场的状态,提出安全预警信号。该方法应用稳定准确,在电力设施作业现场监控方面有广大的应用前景。
[1]龚超,罗毅,涂光瑜.计算机视觉技术及其在电力系统自动化中的应用[J].电路系统自动化,2003,27(1):76-79.GONG Chao,LUO Yi,TU Guang-yu.Computer vision technique and its application to automation of power Systems[J].Automation of Electric Power Systems,2003,27(1):76-79.
[2]孙凤杰,崔维新,张晋保,等.远程数字视频监控与图像识别技术在电力系统中的应用[J].电网技术,2005,29(5):81-84.SUN Feng-jie,CUI Wei-xin,ZHANG Jin-bao,et al.Application of remoter digital video monitoring and image recognition technology in power system[J].Power System Technology, 2005,29(5):81-84.
[3]罗广孝,戚宇林,李星蓉.远程图像监控在电力系统中的应用[J].电力系统通信,2002(4):19-22.LUO Guang-xiao,QI Yu-lin,LI Xing-rong.The application of remote video surveillance system in electric power system [J].Telecommunications for Electric Power System,2002(4): 19-22.
[4]王永灿,冯远静,俞立.基于无线视频传感网的高压塔架监控系统研究[J].传感技术学报,2009,21(12):2039-2043.WANG Yong-can,FENG Yuan-jing,YU Li.Research for electronic tower supervising system based on wireless video sensor networks[J].Chinese Journal of Sensors and Actuators, 2009,21(12):2039-2043.
[5]王其华,李希字.基于自标定双目视觉算法的 3维图像构建[J].激光技术,2012,36(3):416-420.WANG Qi-hua,LI Xi-yu.3-D image construction based on self-calibration binocular vision algorithm[J].Laser Technology,2012,36(3):416-420.
[6]Milan S,Vaclav H,Roger B,et al.图像处理,分析与机器视觉[M].北京:人民邮电出版社,2003.
[7]Zhang Z.A flexible new technique for camera calibration[J].Pattern Analysis and Machine Intelligence[J].IEEE Transactions on,2000,22(11):1330-1334.
A precaution method based on 3D scence model for power equipment security
PENG Bin1,MA Li-qun1,PAN Jian-yue2,ZHANG Yuan-xin3,CHEN Xi3
(1.Lin’an Power Bureau,Lin’an 311300,China;2.Hangzhou Power Bureau,Hangzhou 310009,China; 3.Xi’an Jiaotong University,Xi’an 710049,China)
In the process of power facilities on-site operations,the location of staff should be obtained for security warning.An algorithm based on three-dimensional(3D)scene calibration technique was proposed for precaution.Firstly,the priori calibration data was extracted from the surveillance video and work field;secondly,the 3D scene model was established based on the fitted priori data;and then,the actual location of staff was computed and compared with the precaution parameters to confirm the present on-site situation.This method has been proven in field,it is accurate and stable.The location of staff can be computed correctly and the safety warning signal can be sent out in time.
power equipment;video surveillance;3D scene;calibration;precaution
TN384
A
1674-6236(2015)10-0065-03
2014-09-04 稿件编号:201409037
国家自然科学基金资助项目(9092003)
彭 斌(1975—),男,湖北宜昌人,高级工程师。研究方向:信息化管理及信息技术。
猜你喜欢
经济技术协作信息(2022年28期)2022-11-24
消费电子(2022年6期)2022-08-25
汽车维修与保养(2020年11期)2020-06-09
中国惯性技术学报(2017年1期)2017-06-09
中国公共安全(2017年11期)2017-02-06
办公自动化(2016年18期)2016-12-17
光学精密工程(2016年3期)2016-11-07
新闻前哨(2015年2期)2015-03-11
西安建筑科技大学学报(自然科学版)(2014年6期)2014-11-10
城市建设理论研究(2012年35期)2012-04-23