基于PLC平台的风电机组变桨控制系统设计
2015-12-19 08:43王菲
卷宗 2015年11期
关键词:风力发电机组
王菲
摘 要:本文首先介绍了变桨距控制系统的工作原理,其次在硬件选型的基础上,提出了一种基于PLC平台的风电机组变桨控制方案。通过对实验结果进行分析得知,设计的PLC变桨系统可以使机组安全可靠运行,验证了软硬件设计的合理性。
关键词:变桨距;风力发电机组;PLC
1 引言
与定桨距风电机组相比,变桨距风电机组表现出更多的优越性:既能提高机组的可靠性,又能保证高的风能利用系数、优化输出功率曲线。随着风电机组功率等级的增加,采用变桨距技术已是势在必行。变桨距风力机重量较轻,整机的受力状况良好,并使风电机组有可能在不同风速下始终保持最佳风能利用率。风电机组能否实时获取最大风能,取决于变桨距控制系统。
风电机组大多工作于恶劣的自然环境中,而且无人值守,这就要求其控制系统具有较好的抗干扰能力和较强的工作可靠性。在运行时,要求变桨距系统能够快速响应启停命令、实时优化输出功率曲线。通过分析变桨距控制系统的特点与要求,选用PLC作为平台设计控制器能够满足变桨距系统的控制要求。
2 变桨距风力机及其控制方式
在风力发电机组中,变桨距控制器是机组核心控制器之一,其性能直接关系到机组的安全可靠运行,影响机组的使用寿命。通过合理控制桨距角,可以使输出功率更加平稳、转矩振荡和机舱振荡减小,而且可以有效地降低噪音、改善叶片和整机的受力状况。变桨距风力发电机组比定桨距风力发电机组具备更好的风能捕获效率,因此,大型风力发电机组大多都采用变桨距控制技术。
变桨距调速是大型风力发电机组的主要调速方式之一。变桨距调速的原理是通过增大桨距角,从而减小由于风速增大而引起的风轮转速加快的趋势。液压变桨距系统将电动液压泵作为工作单元,将电磁阀作为主要控制单元,将液压油作为传递介质,以油缸活塞杆的径向运动推动叶片的圆周运动,从而改变叶片的桨距角。当风速增大时,变桨距控制系统动作,推动叶片向桨距角增大的方向转动而使叶片捕获的风能减少,维持风轮转速在额定转速附近。当风速减小时,实现相反动作,保证风轮捕获的风能基本恒定。液压变桨距系统具有体积小、轻巧、扭矩大、定位准确、不需要变速结构等优势,能够更加快速、准确地将叶片调节至设定桨距。因此,目前大型风力发电机组大多采用液压系统作为变桨距系统。
3 变桨距控制器的设计
3.1 系统的硬件设计
采用欧姆龙公司的CJ1M系统PLC作为平台设计变桨控制器。发电机的功率信号由功率传感器以模拟量信号(0~10V对应功率0~800KW)输入到PLC,桨距角信号也以模拟量信号(0~10V对应桨距角0~90°)输入到PLC模拟量输入单元,液压传感器信号同样以模拟量形式输入PLC。模拟量输入单元选用CJ1W-AD041,模拟量输出单元选用CJ1W-DA021,输出信号范围为-10V~+10V,信号输出给比例阀用来控制变桨速度。选用高速计数单元CJ1W-CT021用来记录发电机的转速。
3.2系统的软件设计
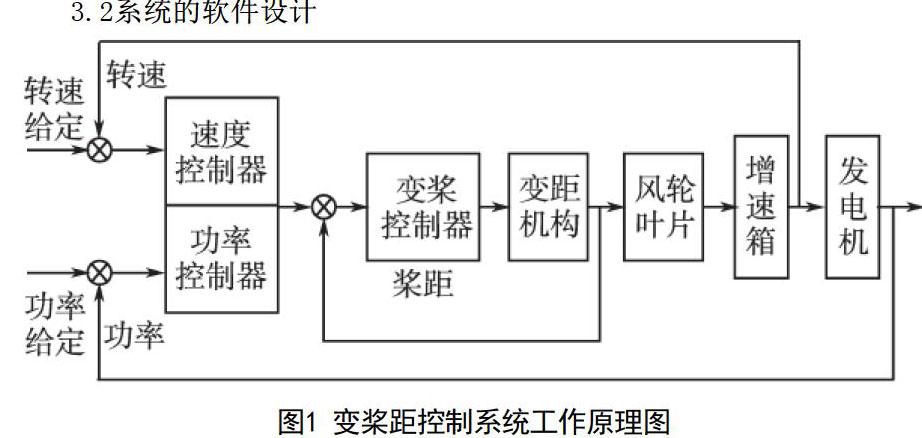
變桨距系统调节风电机组的输入功率,是机组不可或缺的组成部分。图1为变桨距控制系统原理图。机组在启动过程中,叶片预定位置是待机还是顺桨,主要由风速和发电机转速决定。在机组并网发电后,变桨距控制在风速和发电机输出功率变化时,启动功率调节器使输出功率稳定在其额定值附近,当风速高于设定的切出风速时,控制器启动紧急全顺桨。
欧姆龙PLC作为机组变桨距控制器实现了变桨系统的主要功能,采用其编程软件实现了机组变桨距系统的所有控制算法。当实际风速大于启动风速时,变桨控制器动作,减小桨距角到设定位置;当实际风速大于额定风速时,变桨控制器调节桨距角使输出功率稳定在额定功率附近;急停或者停机等故障信号产生时,变桨控制器控制液压系统动作立即拖动叶片实现全顺桨。
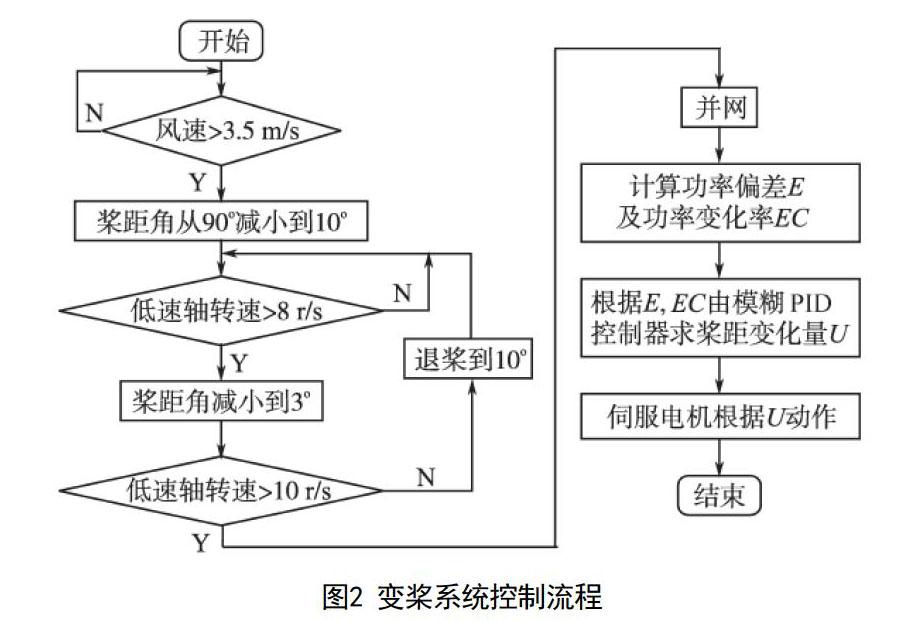
图2为风电机组变桨系统控制流程图。当风速风向仪检测到风速大于启动风速时,变桨PLC控制叶片从90°桨距角以1°/s的速度减小至10°;同时若检测到主轴转速在8rad/s以上,则继续转动叶片至3°桨距角位置;此时再检测主轴转速是否满足并网条件,如果转速大于10rad/s并维持10分钟以上,则发电机并网发电,否则调节叶片退至桨距角10°位置。风速大于额定风速时,功率调节在机组变桨系统中至关重要,为改善控制效果,采用模糊PID算法作为该风速段的变桨距控制器算法核心。模糊PID控制器根据实际测量功率与给定功率的偏差e及其变化率ec,调节PID控制参数中比例系数Kp、积分系数Ki和微分系数Kd。加入模糊控制算法的PID自适应控制器具有较强的稳定性和鲁棒性,并在非线性系统中体现了较好的适应性。
模拟PID控制器应遵循的规则:给定功率与反馈功率的偏差较大时,控制器以快速消除偏差为主;偏差较小时,控制器应以保持变桨控制系统稳定、防止超调过大为主。模拟控制器在设计上采用Mamdani法,同时运用最大隶属法则解模糊系数,最后得到自适应PID法模糊查询表。
4 结束语
根据上述提出的设计方法,以实训室风电机组为对象进行了模拟实现,通过调试,此方案可以实现对风力机的良好控制。采用这种PLC控制可以使风电机组安全运行,在出现停机故障时可以迅速顺桨停机;运行时满足功率最优化的原则,在额定风速以下时,桨距角保持在3°不变,在额定风速以上时,能够根据输出功率与额定功率的差值调节桨距角的位置,使输出功率维持在额定功率附近,波动误差不超过10%。本文基于PLC平台设计的风电机组变桨距控制器,抗干扰能力强、性能可靠,达到了设计要求。
参考文献
[1]叶杭冶.风力发电机组的控制技术[M].北京:机械工业出版社,2002.
[2]常杰,孟彦京.风力发电变桨控制系统设计[J].电气传动.2010,40(5):41-43.
[3]李建林,张雷,鄂春良.基于欧姆龙PLC的风电机组变桨距系统[J].国内外机电一体化技术.2010,42(3):48-51.
[4]罗昕,张磊.基于倍福PLC的风电机组变桨控制设计与研究[J].电气传动.2014,44(7):54-58.
猜你喜欢
中国高新技术企业(2016年33期)2016-12-27
科技创新与应用(2016年34期)2016-12-23
科学与财富(2016年18期)2016-12-22
科学家(2015年10期)2015-12-26
中国高新技术企业(2015年34期)2015-09-12
中国高新技术企业(2015年22期)2015-06-15