探究柔性机械臂的振动控制
2015-12-21 01:26赵辉宋占胜广东明阳风电产业集团有限公司广东中山528437
化工管理 2015年12期
赵辉 宋占胜(广东明阳风电产业集团有限公司,广东 中山 528437)
机械臂柔性动力分析和相关控制理论已经成为了我国航空航天与机械工程力学中涉及到的研究重点,从当前的现状来看,机械臂在相关构造上存在一定的缺点,那就是笨重。工业用机械人的自身重量和载重比例约为10:1—30:1之间,人的负载能力能够达到1:1,为了适应工程的实际需要,开发出更高水平的机器人,就要对机械系统动力学进行深入研究,其中涉及到的领域包括动力学、控制策略、结构的设计、信息的获取、模拟计算和机电控制等方面。当前我国对于刚性机器人的相关研究工作也日益成熟,在国际上,研究重点放在了柔性机械人系统中,相关典型结构就是柔性机械臂。
1 柔性机械臂动力学和相关控制问题
有关柔性机械臂的研究可以详细分为控制方法与动力学建模两大方面,对其进行研究的根本目的在于将柔性机械臂运动时产生的变形振动从根本上加以抑制,从而为机械臂末端的准确性和运动过程中的精确轨迹做保障。
1.1 柔性机械臂的动力学建模
柔性机械臂的动力学建模主要研究内容是对柔性机械臂动态变形过程进行全面模拟,在根本上建立相关控制系统,并将其作为控制器的设计依据。随着相关柔性系统和柔性机械臂持续增大,以往的建模方式逐渐失去了有效性,甚至使用以往的建模方式还会产生一些副作用。国外专家LIKINS使用牛顿力学中涉及到的刚柔耦合运动中混合坐标的概念,来进行建模。FRISCH使用矩阵与矢和两种力学描述方式,将集中质量和分布质量的动力模型建立了起来,布克使用LAGRANG与NE方式建立起来了集中质量与分部质量的柔性结构的动力学模型,Shabana使用相同质量的有限元方式对变形体加以全面离散,利用在浮动坐标下的有限元函数对柔性体模型进行描述,使用同一类别LAGRANG的方式建立起平面与空间中柔性体力学的动力学模型。KANE等学者使用变形约束的方式建立梁氏部件中涉及到的动力学方程,并以此为基础,创设了与之相关的动力学的刚化问题。上述对柔性动力学方程进行建模的方式各有千秋,在不同实际情况下,结合柔性机械臂自身特征与相关环境,来选择相对具体的动力学建模方式。
1.2 柔性机械臂的相关振动控制
柔性机械臂是一种非常典型的几点耦合动力系统。同时也具备和分布参数相同的特征,即:非线性、时变性、多输入与输出性,是一种带有综合性质的系统。除此之外,还具备动力学中的不稳定性与不确定性,截止到目前,学者们对于柔性机械臂中涉及到的机械振动控制工作的研究还显得非常不足,从当前的情况来看,学者们的相关目标还仅仅停留在对于单体都行机械臂控制的相关规律之中。由于当前研究的深入性与工程的需要,令与之相关的控制系统的分析与控制设备的设计工作也显得复杂了许多,几乎在所有和控制相关的领域中,都能够发现柔性机械臂的相关应用,从当前情况来看,可以将柔性机械臂的相关控制方式分成以下几类:
1.2.1 前馈补偿方式
所谓前馈补偿法,指的就是把机械臂柔性变形所出现的机械震动看成是对于刚性运动的干扰,这种干扰值是确定的,比如国外学者就采用这种方式对机械震动臂的控制进行了全面研究,利用这种补偿变形的前馈控制方式,能够在根本上将驱动力矩加以控制,很显然,这种方式的鲁棒性较差,非常依赖动力模型精准度。
1.2.2 被动控制方式
在柔性机械臂中,全面采用了阻尼减振设备,涂料和度和性金属板,其合金或者弹性阻尼材料所形成的结构都属于阻尼控制,这种控制方式能够在一定的宽频中将相关结构振动加以全面抑制,并减少了振动的衰减。有学者对单柔性机械臂的被动控制进行了全面研究。
1.2.3 主动控制方式
这里所提到的主动控制指的是利用外部输入的方式获取的期望阻尼系统与刚性控制的方式,在1995年[1],就有学者对柔性机械臂的主动控制问题进行了全面研究,有学者在刚性机械臂反馈的基础上,利用相关矩阵中增加和模态坐标相对应的增益项目,其目的是在根本上将柔性机械臂对弹性震动所产生的阻尼进行全面研究,并在一定程度上达到了控制效果,有人使用聚偏二氟乙烯和复合材料结合,制造出了三层的薄板结构,上层是压电驱动设备,下层是压电传感设备,中间则是复合材料。并在根本上给出了机敏结构的相关控制系统为主的有限元模型,从当前的情况来看,这种目标还不能在根本上得以实现,使用压电陶瓷当做驱动器,传感器,使用电脑对其进行优化控制,是一个抑制机械振动的有效方式。
1.2.4 智能控制方式
智能的控制理论的相关发展,为柔性机械的振动控制提供了新的道路,对控制输入序列进行学习,把确定输入的序列前馈作用在控制系统之中,这种控制方式对于多种周期性确定系统是非常适用的,除此之外,神经网络的相关控制在柔性机械臂振动过程中也得到了一定的研究。
2 柔性机械臂振动的相关控制实验
2.1 实验系统
在图1中展示了柔性机械臂的相关原理

图1,柔性机械臂原理示意图
为了在根本上将柔性机械臂的震动效果加以全面控制,把机械臂的振动信号直接反馈到控制器中,组成柔性机械臂的全封闭反馈的控制系统,本实验使用了柔性机械臂为矩形截面横梁,材料选择为45钢材,相关规格符合国际标准,前阶段的平率分别是3.5赫兹,22赫兹和61.5赫兹,柔性机械臂的物理参数为7.8*103kg/m3,其中杨式模量为2.0*1011N/m2,实验的具体工况为转角90度,转速90度,控制增益为830。
2.2 柔性机械臂PID的相关控制
这里提到的PID控制器,指的是对于误差的信号进行加权比例,积分和微分进行计算,最后将相关结果传送给受控制的对象,在根本上完成整个过程,如果将PID的相关控制方法用在柔性机械臂的动态响应控制中,利用柔性机械臂的末端点在转角当做输出,用期望转角当做输入,相关驱动力的力矩为:

在该算式中,kpkd和ki分别表示了相关控制比例,微分速度以及积分增益。对于转速相对较低,弹性变化相对小的点进行控制,能够利用设计反馈增益系数的方式来实现控制,在根本上满足相关工程的要求。PID控制有保证封闭环境稳定性的优势,但这种控制方式并没有在真正意义上将柔性机械臂的弹性模型信息对控制器的相关影响进行全面考虑,这种现象的出现令PID的控制器带宽不足,不能实现其精准性要求,为了在根本上提升柔性机械臂的振动控制效果,需要把柔性控制机械臂的振动信号直接反馈给控制器,从而形成柔性机械臂的闭环反馈控制。
2.3 实验结果
对额欧星机械臂的残余震动响应进行测定结果详见图2,本实验在根本上证明了PID的控制策略,虽然能够在根本上保障柔性机械臂大范围刚性运动的精准性,但并不能在真正意义上将弹性震动进行有效抑制,其残余振动衰减时间也长,闭环反馈的相关控制能够将刚性运动的动态反应速度延长[2],在根本上抑制了弹性振动,从相关实验结果中我们能够看出,利用实施柔性的急性闭环反馈方式进行全面控制,能够在根本上将机械臂的柔性残余振动幅值降低,通过首个周期时振幅衰减一个等量级,其残余振动经过1-2个振动周期后很快就会衰减为零。
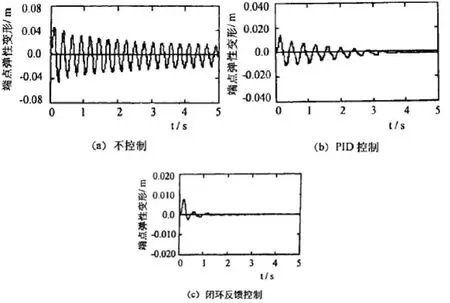
图2.柔性机械臂残余震动响应情况
3 结语
综上所述,本文从现实的角度,对柔性机械臂的振动控制进行了全面分析,通过把PID的相关控制措施与反馈控制策略用在柔性机械臂的主动控制上进行了实验,得到了较为满意的效果,本项研究对航天器,机械人与高速机构的柔性部件动力学设计仿真控制,有着非常重要的现实意义。
[1]杨康华.柔性机械臂的振动控制与实验研究[D].北京邮电大学,2011.
[2]滕悠优.柔性机械臂的主动控制与实验研究[D].上海交通大学,2007.
猜你喜欢
机械工业标准化与质量(2022年9期)2022-09-30
空气动力学学报(2022年4期)2022-08-23
黑龙江大学自然科学学报(2022年1期)2022-03-29
石油沥青(2021年5期)2021-12-02
文化创新比较研究(2020年7期)2021-01-13
中学生数理化(高中版.高考理化)(2020年11期)2020-12-14
电子制作(2018年17期)2018-09-28
通信电源技术(2018年5期)2018-08-23
浙江大学学报(工学版)(2015年2期)2015-05-30
火炸药学报(2014年1期)2014-03-20