
天地环境差异对航天器设备安装精度 影响分析
2015-12-23 06:48任春珍尚明友沈锋钢
航天器环境工程 2015年1期
张 鹏,任春珍,尚明友,沈锋钢
(1.中国空间技术研究院 载人航天总体部;2.北京卫星环境工程研究所:北京 100094)
0 引言
有在轨安装精度要求的航天器设备主要包括光学设备、测控天线设备、陀螺组件及姿轨控敏感器等[1]。将这些设备的安装精度调整到满足在轨要求是航天器地面总装的重要任务之一[2]。地面环境与在轨环境存在较大差异,而这种差异是导致安装 精度不相符的重要原因。例如,地面通过机械调整手段补偿了航天器结构因重力环境而产生的弹性变形对精度影响,使设备地面安装精度达到了在轨要求。但在空间失重环境下,由于应力释放和航天器结构的弹性变形在轨消除,致使原有的安装精度发生改变。另外,由于受操作条件限制,部分设备的地面精度调测工作只能在常压环境(即航天器内外压差为0)下进行,而航天器特别是载人航天器在轨内外压差保持为1 个大气压,这种压力环境的改变可能带来航天器结构变形,也会影响设备的原有安装精度。因此,分析天地环境差异对航天器设备安装精度的影响,并采取措施减小这种影响,对保证航天器在轨正常飞行和任务圆满完成具有重要意义。
目前为止,许多文献对航天器设备安装精度方面的研究主要聚焦在精测工具、精测方法、精测工艺及测量算法上[2-10],很少专门分析天地环境差异对精度带来的影响。本文以航天器陀螺组件及姿轨控敏感器设备为例,首先分析比较了在空载、满载、水平停放、垂直停放4 种状态下由地面重力引起的航天器结构变形对设备安装精度的影响;然后模拟在轨内压环境开展航天器受压分析,比较研究地面常压环境和在轨内压环境对设备安装精度的影响;最后进行试验验证,针对分析验证结果提出设备地面总装精测的合理化建议。
1 设备布局及在轨精度要求
1.1 设备布局
图1所示为载人航天器构型及设备布局。航天器由密封舱和非密封舱组成,沿航天器周向0°、 90°、180°、270°对应的母线分别定义为I 象限线、II 象限线、III 象限线和IV 象限线。姿轨控敏感器A 布局在III 象限的非密封舱舱外靠近“结构框0”处,姿轨控敏感器B 布置在I 象限的密封舱舱外“结构框1”与“壁板1”交接处,姿轨控敏感器C 设置在III 象限的密封舱舱外“壁板4”的中部,陀螺组件布局在III 象限的密封舱内“结构框2”处。
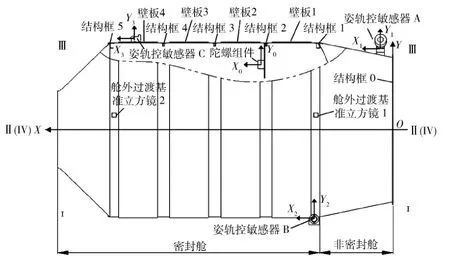
图1 载人航天器构型及设备布局 Fig.1 Configuration and equipment layout of manned spacecraft
1.2 坐标系定义
图1中的各坐标系定义如下:O-XYZ为航天器坐标系(结构基准),原点O取在“结构框0”的圆心位置,OX轴指向密封舱方向,OY轴指向正III 象限线,OZ轴遵守右手法则。
O0-X0Y0Z0为陀螺组件坐标系,O1-X1Y1Z1为姿轨控敏感器A 坐标系,O2-X2Y2Z2为姿轨控敏感器B 坐标系,O3-X3Y3Z3为姿轨控敏感器C 坐标系:它们的坐标轴指向与航天器坐标系指向一致。
1.3 设备在轨安装精度要求
陀螺组件的安装精度以航天器坐标系为基准,姿轨控敏感器A~C的安装精度以陀螺组件坐标系为基准,如表1所示。

表1 设备安装精度要求 Table1 Requirements of installation precision of equipment
2 地面重力环境的影响分析与验证
航天器地面总装有水平停放和垂直停放两种状态,在重力作用下会使航天器结构分别产生垂直于OX轴的弯曲变形和平行于OX轴的压缩变形。下面采用有限元方法计算分析两种停放状态下结构因重力作用变形对设备安装精度的影响,并进行地面试验验证。
2.1 航天器水平停放状态
水平停放状态是航天器I 象限朝地,利用地面工装支撑结构框1 和结构框5。
1)空载条件
图2是航天器空载水平停放状态下受重力作用影响的结构变形云图,从图中可以看出航天器整体向-Y向发生弯曲变形,其中两支撑点中部变形最大,因为弯曲变形使得陀螺组件及姿轨控敏感器设备发生角度误差。图3是计算得到的航天器结构变形曲线,通过对变形量进行角度转换后可知:航天器受地面重力作用影响使陀螺组件相对结构基准产生0.048′的角度误差,姿轨控敏感器A 相对陀螺组件产生0.048′的角度误差,姿轨控敏感器B 相对陀螺组件产生0.034′的角度误差,姿轨控敏感器C相对陀螺组件产生0.064′的角度误差。
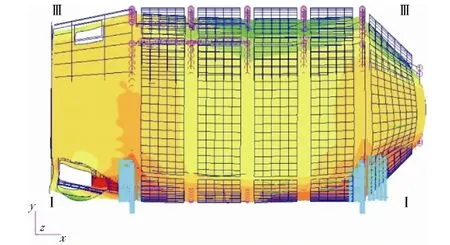
图2 空载水平停放状态下航天器结构变形 Fig.2 Deformation of spacecraft structure under level parking condition without load
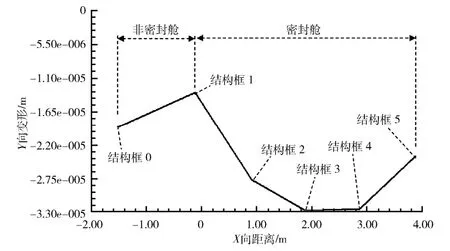
图3 空载水平停放状态下航天器变形曲线 Fig.3 Curve of spacecraft deformation under level parking condition without load
2)满载条件
图4是航天器满载水平停放状态下,受重力作用影响的结构变形曲线,从图中看出,相比空载,满载受地面重力影响的变形趋势一致,只是量级明显增大。例如满载水平状态下,姿轨控敏感器A 相对陀螺组件角度误差由空载时的0.048′变为0.23′。
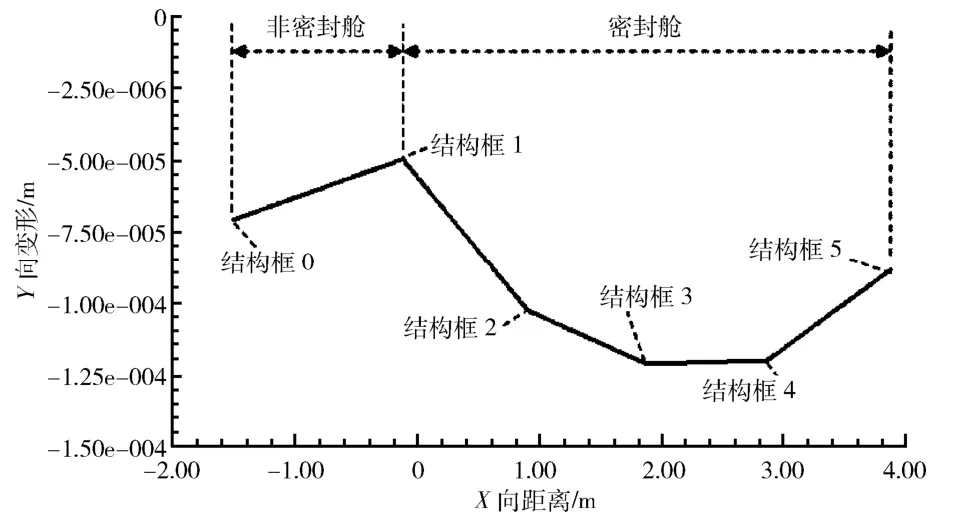
图4满载水平停放状态下航天器变形曲线 Fig.4 Curve of spacecraft deformation under level parking condition with full load
2.2 航天器垂直停放状态
垂直停放是航天器+X轴朝天,利用地面工装支撑结构框0 实现垂直停放。
1)空载条件
图5是航天器空载垂直停放状态下受地面重力作用影响的变形云图,从图中看出航天器结构同时发生轴向压缩变形和径向膨胀变形。两种变形综合影响使布局在航天器锥形非密封舱上的姿轨控敏感器A 产生了角度误差;轴向压缩变形使安装在航天器柱形密封舱上的陀螺组件及姿轨控敏感器B、C 仅发生纵向平移而不会产生角度变化,但径向变形会使得柱形密封舱上的设备产生角度误差。
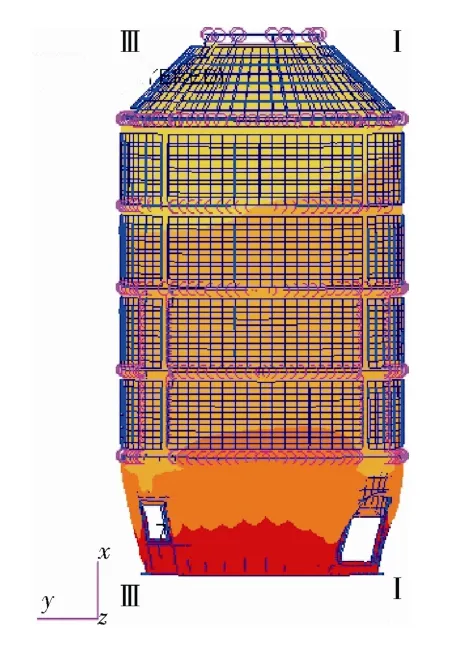
图5 空载垂直停放状态下航天器结构变形 Fig.5 Deformation of spacecraft structure under vertical parking condition without load
图6是航天器结构变形曲线,通过对变形量进行角度转换后可知:航天器受重力影响作用使陀螺组件相对结构基准产生0.001 8′的角度误差,姿轨控敏感器A、B、C 相对陀螺组件产生的角度误差分别为0.028′、0.000 5′和0.002 2′。
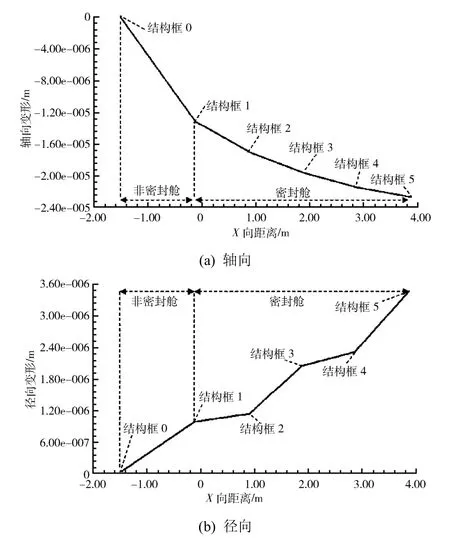
图6 空载垂直停放状态下航天器变形曲线 Fig.6 Curve of spacecraft deformation under vertical parking condition without load
2)满载条件
图7是航天器满载垂直停放状态下,受重力作用影响的结构变形曲线。同样,满载相比空载变形趋势一致,只是量级明显增大,例如满载垂直状态下,姿轨控敏感器A 相对陀螺组件角度误差由空载时的0.028′变为0.11′。
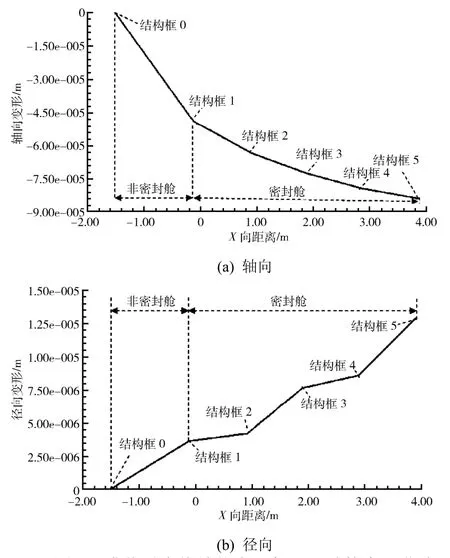
图7 满载垂直停放状态下航天器结构变形曲线 Fig.7 Curve of spacecraft deformation under vertical parking condition with full load
2.3 计算结果分析比较及试验验证
分析可知,地面重力环境对航天器设备安装精度的影响远小于表1所列的设备安装精度要求。与满载状态相比,空载下设备相对基准的角度误差明显较小;与垂直停放状态相比,水平停放状态下设备相对基准的角度误差明显较大,如表2所示。
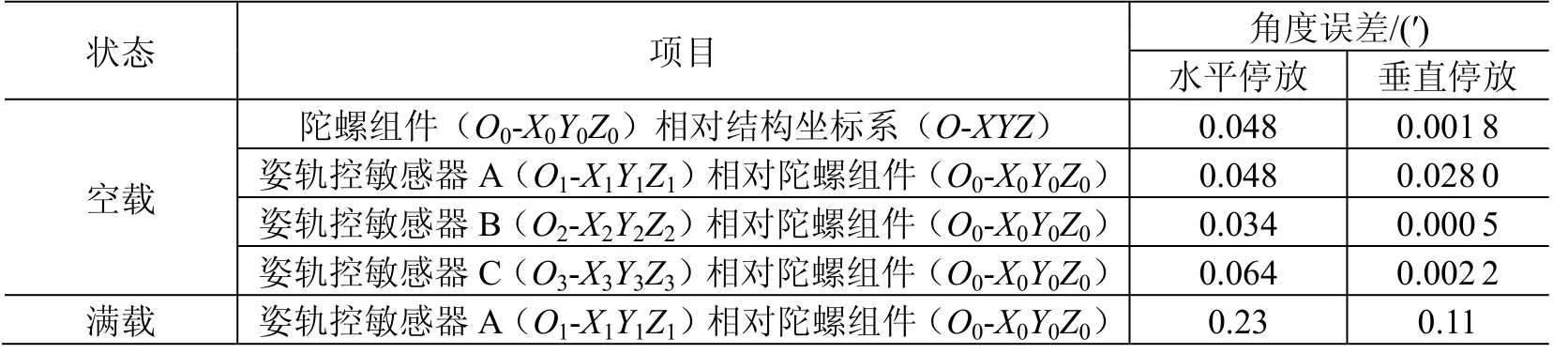
表2 地面重力环境对设备安装精度影响(计算结果) Table2 Influence of ground gravity environment on the installation precision of equipment (calculation result)
地面总装时直接测量航天器变形来验证分析结果存在一定困难,因此通过比较设备在垂直、水平两种状态下的角度变化来验证分析结果的一致性。表3是航天器在满载条件下选取姿轨控敏感器A 进行精测试验的数据,结果显示姿轨控敏感器A在垂直、水平两种停放状态下的角度变化在0.1′量级范围内。根据表2分析结果,满载条件下姿轨控敏感器A 在两种停放状态下相对陀螺组件坐标系的角度误差变化值为0.12′,与试验数据处于同一 量级,分析结果一致性较好。
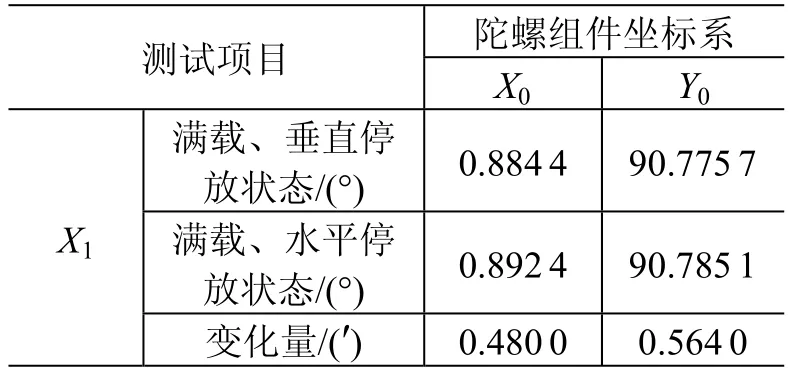
表3 姿轨控敏感器A 精测试验数据 Table3 Data of precision measurement experiment of attitude- and orbit-control sensor A

表3 (续)
3 在轨内压环境的影响分析与验证
航天器在轨失重条件下承受1 个大气压的内压影响。因航天器是一个轴对称的旋转体结构,故采用平面轴对称模型对结构在轨受力情况进行分析。图8为密封舱内施加1 个大气压后的结构变形图,图9为部分结构框变形的放大图。
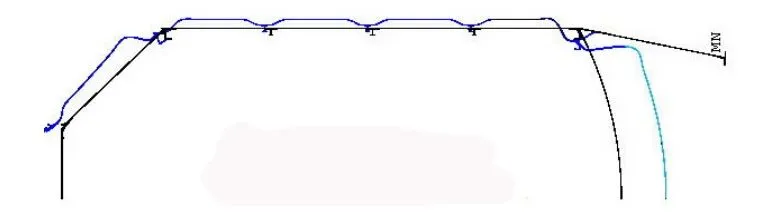
图8 在轨内压环境下航天器结构变形 Fig.8 Deformation of spacecraft structure in space pressure environment
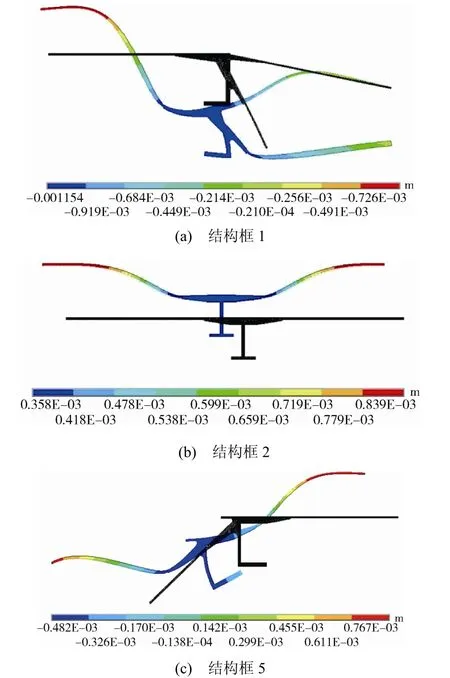
图9 在轨压力环境下结构框变形 Fig.9 Deformation of frame structure in space pressure environment
从图中看出:
1)在轨内压环境对航天器非密封舱结构没有明显影响,不会使安装在非密封舱的姿轨控敏感器A 及结构框0 产生较大角度变化;
2)在轨内压环境对航天器密封舱结构影响显著,其中结构框2 虽然发生了明显的径向膨胀变形,但自身并未产生扭转,因此不会使安装在其上的陀螺组件产生角度变化;
3)结构框1 和结构框5 在内压环境下发生了明显扭转变形,所以安装在结构框1 上的姿轨控敏感器B 产生了角度误差。图10是姿轨控敏感器B安装面的变形曲线,通过对变形量进行角度转换后可知:姿轨控敏感器B 产生了20.4′的角度误差。
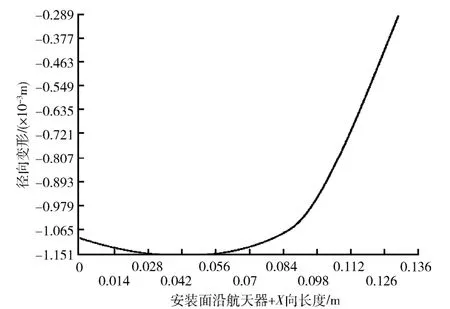
图10 姿轨控敏感器B 的安装面变形曲线 Fig.10 Deformation curve of assembly surface of attitude-control and orbit-control sensor B
由以上分析,可以认为:
1)在地面常压环境下调测所确立的陀螺组件相对结构基准、姿轨控敏感器A 相对陀螺组件的角度关系不会因航天器在轨内压而发生明显变化,即地面精测结果能够反映在轨状态;
2)在地面常压环境下所确立的姿轨控敏感器B 相对陀螺组件的角度关系会因航天器在轨内压而产生较大的影响。
为验证分析结果的有效性,通过对密封舱内充2 个大气压的方式来模拟航天器在轨时“密封舱外真空、舱内一个大气压”的状态进行了地面验证试验。表4是姿轨控敏感器B 在内压作用影响下的地面验证试验精测数据,可知常压与内压状态下姿轨控敏感器B 相对陀螺组件的最大角度变化为19.884′,分析结果与试验值一致性较好。
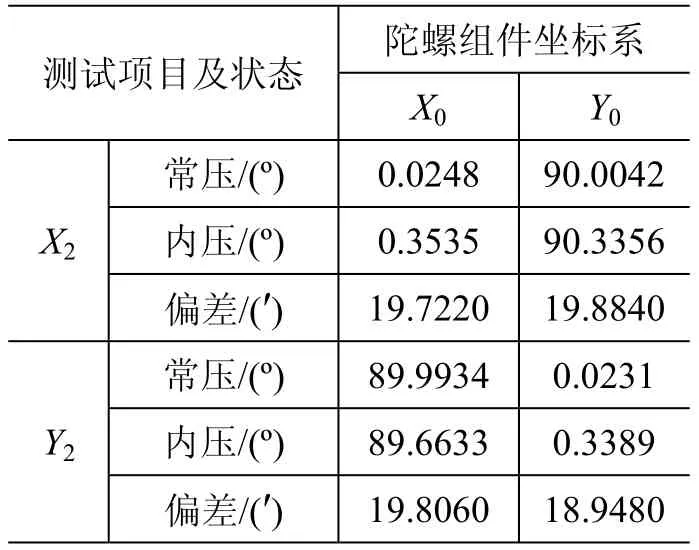
表4 姿轨控敏感器B 精测试验数据 Table4 Data of precision measurement experiment of attitude -and orbit-control sensor B
4 结论与建议
通过计算分析了天地重力环境和压力环境的差异对航天器特别是载人航天器设备在轨安装精度的影响,并进行了地面试验验证,主要结论如下:
1)地面重力环境引起的航天器设备精度误差远小于设备自身精度要求。在空载、垂直停放状态下,设备安装精度受地面重力影响比满载、水平停放状态明显较小。航天器地面总装期间应该尽量采用空载、垂直停放方式进行设备精度测量。
2)对于安装在非密封舱及结构框2 上的姿轨控敏感器A 和陀螺组件,它们的安装精度受航天器密封舱内压影响较小,常压环境下的精测结果能够反映其在轨状态。
3)对于安装在结构框1 上的姿轨控敏感器B,其安装精度受航天器密封舱内压影响较大。这类设备应在地面充压状态下进行精测,以保证它们在轨内压环境下的安装精度要求。
(References)
[1] 谭维炽,胡金刚.航天器系统工程[M].北京: 中国科学技术出版社,2009: 89-93
[2] 杨再华.航天器总装精度测量方法分析[J].航天器环境工程,2007,24(6): 390-392 Yang Zaihua.An analysis of measurement technology in spacecraft assembly[J].Spacecraft Environment Engineering,2007,24(6): 390-392
[3] 任春珍,杨再华,孙刚,等.太空环境飞行器交会对接设备精测工艺方法研究[J].航天器环境工程,2010,27(6): 768-771 Ren Chunzhen,Yang Zaihua,Sun Gang,et al.Ground- based alignment of rendezvous and docking device used for objective space vehicle[J].Spacecraft Environment Engineering,2010,27(6): 768-771
[4] 任春珍,贾世锦,刘浩淼,等.激光跟踪仪在交会对接微波雷达多径试验中的应用[J].航天器环境工程,2013,30(5): 550-554 Ren Chunzhen,Jia Shijin,Liu Haomiao,et al.Laser tracker used in multi-radius test of microwave radar for rendezvous and docking[J].Spacecraft Environment Engineering,2013,30(5): 550-554
[5] 陶力,杨再华,阮国伟,等.基于激光雷达的卫星发动机精度测量方法[J].航天器环境工程,2013,30(3): 328-331 Tao Li,Yang Zaihua,Ruan Guowei,et al.Alignment precision measurement method of satellite engine based on laser radar[J].Spacecraft Environment Engineering,2013,30(3): 328-331
[6] 刘建新.飞船精度测量技术方案及评定[J].航天器工程,2007,16(3): 106-113 Liu Jianxin.Measuring scheme of a certain spacecraft module and its evaluation[J].Spacecraft Engineering,2007,16(3): 106-113
[7] 徐彦,关富玲,马燕红.充气可展开天线的反射面设计及精度测量[J].浙江大学学报: 工学版,2007,41(11): 1921-1926 Xu Yan,Guan Fuling,Ma Yanhong.Reflector design and precision measurement of inflatable antenna[J].Journal of Zhejiang University: Engineering Science,2007,41(11): 1921-1926
[8] 郭宏伟,邓宗全,刘荣强.空间索杆铰接式伸展臂参数设计与精度测量[J].光学精密工程,2010,18(5): 1105-1111 Guo Hongwei,Deng Zongquan,Liu Rongqiang.Parameter design and precision measurement of space cable-strut deployable articulated mast[J].Optics and Precision Engineering,2010,18(5): 1105-1111
[9] 邓勇,李宗春,范百兴,等.Metroin 在飞船精度测量中的应用[J].导弹与航天运载技术,2009(4): 47-51 Deng Yong,Li Zongchun,Fan Baixing,et al.Application of Metroin in spaceship precision measurement[J].Missile and Space Vehicle,2009(4): 47-51
[10] 王伟,刘笑,郭洁瑛,等.航天器总装精度测量中的一种不规则棱镜矢量计算方法[J].航天器环境工程,2013,30(1): 103-106 Wang Wei,Liu Xiao,Guo Jieying,et al.A vector calculation method of irregular prism for spacecraft integration precision measurement[J].Spacecraft Environment Engineering,2013,30(1): 103-106
猜你喜欢
国际太空(2022年7期)2022-08-16
能源工程(2022年2期)2022-05-23
商用汽车(2021年4期)2021-10-13
无线互联科技(2020年10期)2020-08-14
国际太空(2019年9期)2019-10-23
小学生学习指导(低年级)(2019年10期)2019-10-16
学生天地(2019年6期)2019-03-07
国际太空(2018年12期)2019-01-28
军事文摘(2018年24期)2018-12-26
国际太空(2018年9期)2018-10-18
