基于提高抗扰性和跟随性能的控制策略研究
2015-12-23 07:44周浩,徐学武,黄善忠
兵器装备工程学报 2015年9期
关键词:调节器
【信息科学与控制工程】
基于提高抗扰性和跟随性能的控制策略研究
周浩,徐学武,黄善忠
(海军工程大学 兵器工程系,武汉430033)
摘要:以某舰载武器的位置随动系统为研究对象,在分析原随动系统的控制模型和仿真结果的基础上,探讨了通过加载转速反馈、设计转速调节器来重新构造系统控制模型以提高系统输出响应特性,通过SIMULINK仿真验证上述模型改造效果;为增强控制系统的抗扰性能,探讨了应用变结构控制替代位置调节器来提高随动系统的抑扰问题,通过对变结构控制器的结构设计和参数设置,获得较好的控制效应;仿真试验表明:融合多种控制模式的变结构控制是解决宽域偏差量的重要方法,而合理的结构设计又会使其成为抗干扰的有力工具。
关键词:控制模型;调节器;变结构控制
收稿日期:2015-06-25
作者简介:周浩(1971—),男,博士,副教授,主要从事武器系统与运用工程研究。
doi:10.11809/scbgxb2015.09.025
中图分类号:TJ713
文章编号:1006-0707(2015)09-0097-05
本文引用格式:周浩,徐学武,黄善忠.基于提高抗扰性和跟随性能的控制策略研究[J].四川兵工学报,2015(9):97-101.
Citation format:ZHOU Hao, XU Xue-wu, HUANG Shan-zhong.Control Strategy Study Based on Improving Perturbation Resistance and Tracking Performance of the Servo System[J].Journal of Sichuan Ordnance,2015(9):97-101.
Control Strategy Study Based on Improving Perturbation Resistance
and Tracking Performance of the Servo System
ZHOU Hao, XU Xue-wu, HUANG Shan-zhong
(Department of Weaponry Engineering, Naval University of Engineering, Wuhan 430030, China)
Abstract:This paper took a ship-borne weapons position servo system as the research object, based on the analysis of the original servo system control model and the results of simulation, it discusse design by loading speed feedback, speed regulator to reconstruct the system control model to improve the system output response characteristics, and using SIMULINK simulation to make the proves. In order to enhance anti-interference performance of the system, the article also explored the application of variable structure control alternative position controller. Based on the structure of the variable structure controller design and parameter setting, eventually we realized satisfactory control effect. Facts have proven that variable structure control by adopting the combination of a variety of control mode is an important way to solve the wide domain of the deviation value, and reasonable structure design can make it become a powerful tool for anti-interference.
Key words: control model; regulator; variable structure control
某舰载武器的位置随动系统是典型的按角偏差控制的闭环控制系统,主要功能是对偏差信号进行采样、转换、变换和放大,为该装备角度运行提供具体的控制规律。该系统的控制功能执行机构包括控制信号发送装置、采样角指令角比较器、信号转换放大装置、驱动电机等[1],最终将位置运动执行指令送达机械减速机构以完成装备目标指向性运行。该系统既有方位随动又有俯仰随动,两者的机械传动链相互独立,偏差角采样机构、随动控制板件也相互独立,随动控制系统的调转运行机理也相同[1],因此在下列随动控制模型涵盖了方位随动和俯仰随动并取其一作具体分析。
1位置随动控制模型及仿真
该武器系统中,完成位置调转运行任务的随动控制[2]系统结构框图如图1所示。对图1所示的系统结构框图中各个功能模块的数学模型进行理论推导,将建立的微分方程通过拉普拉斯变换得到如图2所示的位置随动系统传递函数动态结构图。
对于上述多环控制系统,其性能分析常通过Simulink 动态仿真实现,将系统中各功能模块的具体参数代入动态结构,并利用Simulink 提供的仿真工具箱和模型库建立系统动态仿真模型[3]如图3所示。在输入信号设置为单位阶跃,系统的位置响应曲线(对指令信号的输出)如图4所示。
分析其响应曲线,系统输出值在响应初期就作衰减震荡,而且在响应过程中振荡次数多、超调量大、稳定时间长。进一步分析后易知,位置环是系统角度运行的结构闭环,其内有一个电流环,即电流负反馈,电流环负反馈可以实现对执行电机中的电枢电流进行调节,并没有对电动机的转速实施内部调节,为了进一步改善位置随动系统的动态品质,除了需要调节电动机的电枢电流外,还可以引入转速负反馈。

图1位置随动系统结构框图

图2 位置随动系统动态结构
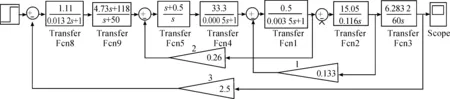
图3 位置随动系统动态仿真模型
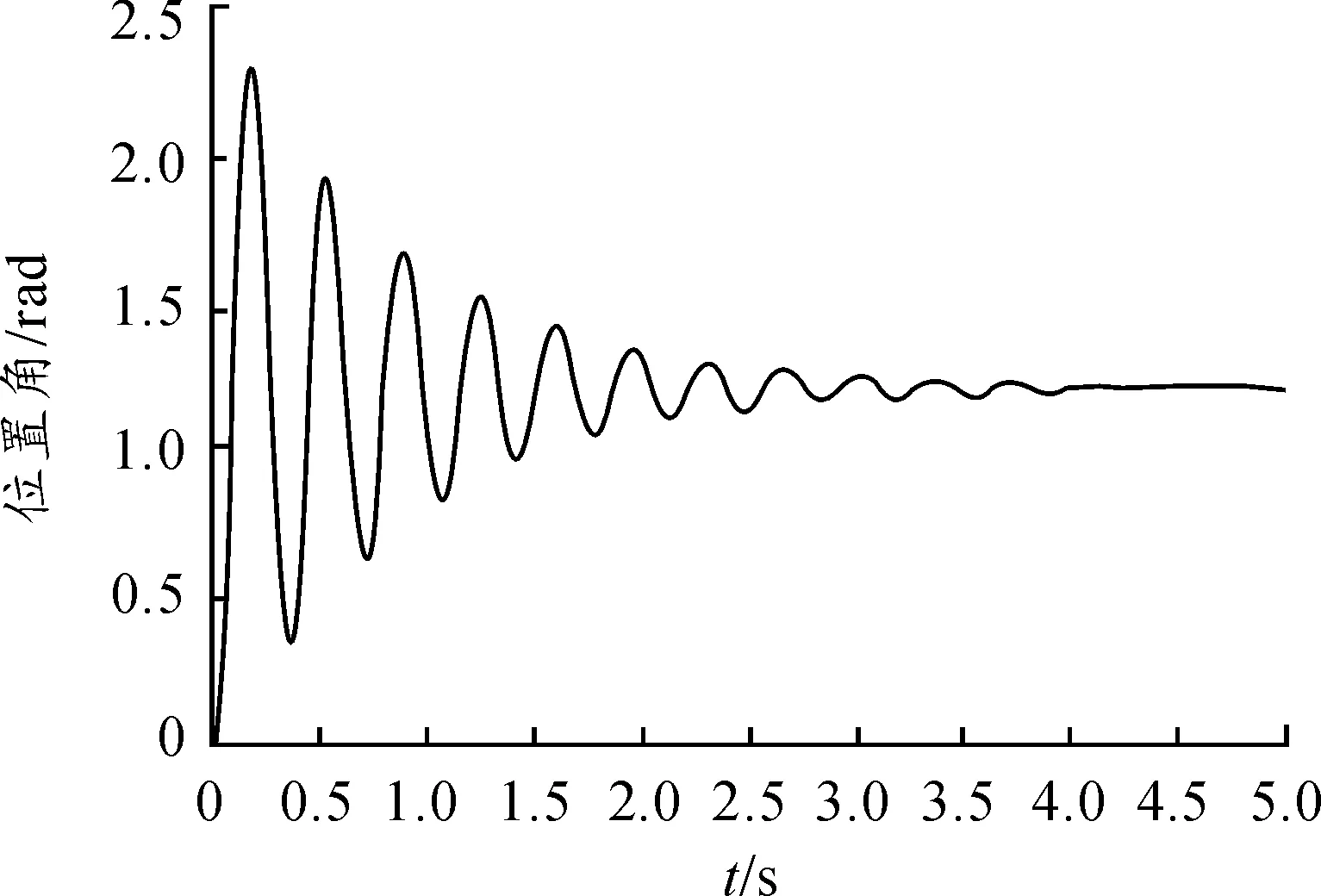
图4 位置随动系统阶跃响应
2控制模型的改造及仿真
引入转速负反馈的目的是从内部调节执行电机的转速,这种改造后的系统就具备3个环,其结构框图如图5所示。图5中的Kt为转速反馈系数,Kt=0.01。于是重新建立位置随动系统的动态仿真模型如图6所示。输入信号仍设为单位阶跃,系统的位置响应曲线如图7所示。
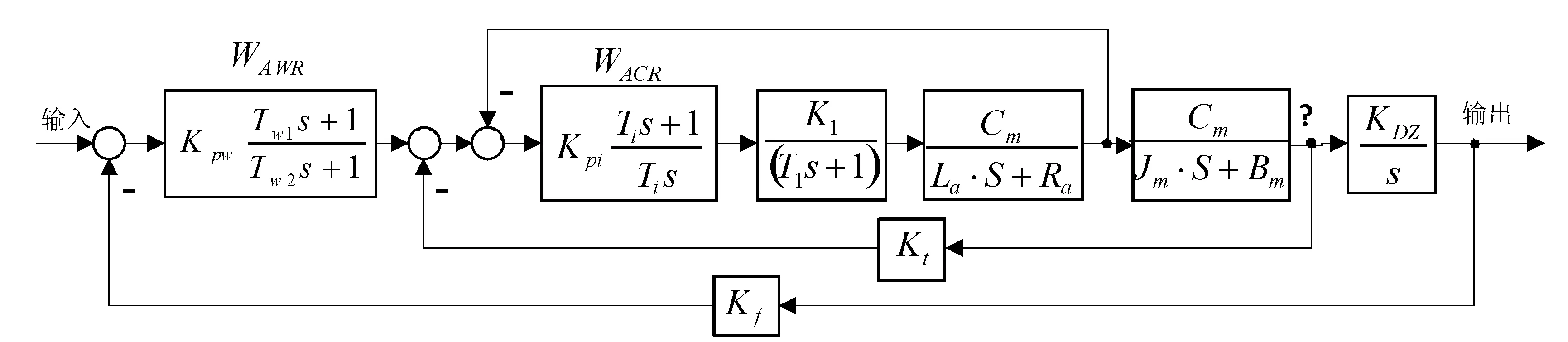
图5 增设转速环后系统结构框图
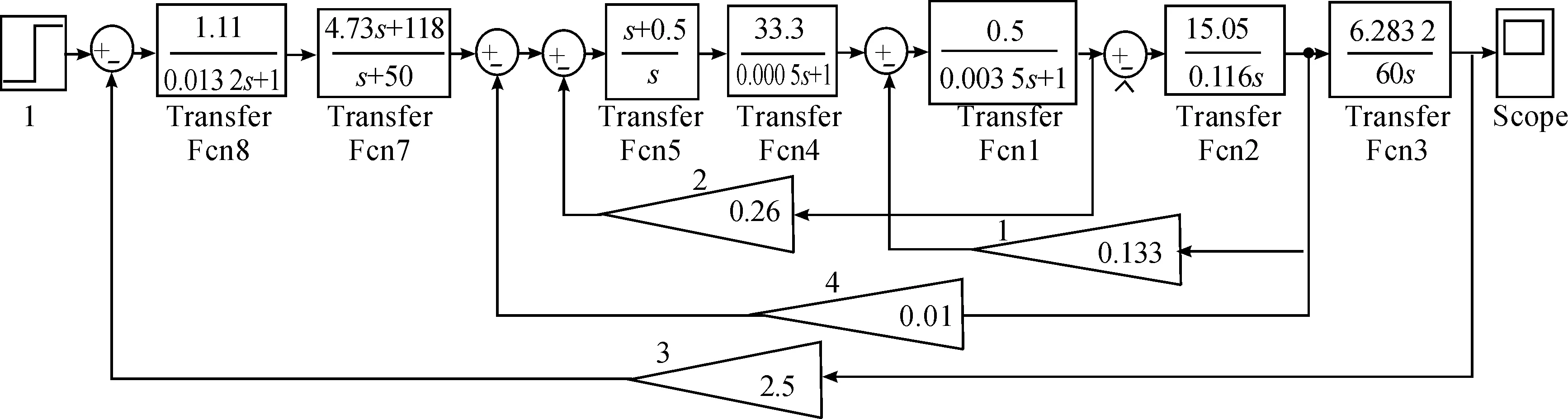
图6 增设转速环后系统动态仿真模型

图7 增设转速环后系统响应
分析其响应,增设转速环后的系统在位置输出响应上较原先的双环系统有一定改善,但振荡次数、超调量和稳定时间还未令人满意。那么如何改进系统才能使闭环响应指标有进一步提高呢?现考虑在转速负反馈的基础上,加设转速调节器,并对转速调节器参数进行设计。基于上述考量,为实现系统快速响应,考虑将转速调节器设置为经典的PI调节器[4],其传递函数为

将参数设置体现到控制系统动态仿真模型[5],如图8所示。对设置了转速调节器的三闭环控制系统进行仿真。其阶跃响应如图9所示。经过多次改造后的控制系统的位置响应,无论是响应速度还是稳定时间都能较好地满足需求。具体表现为响应时间快,振荡次数少,稳态误差小。
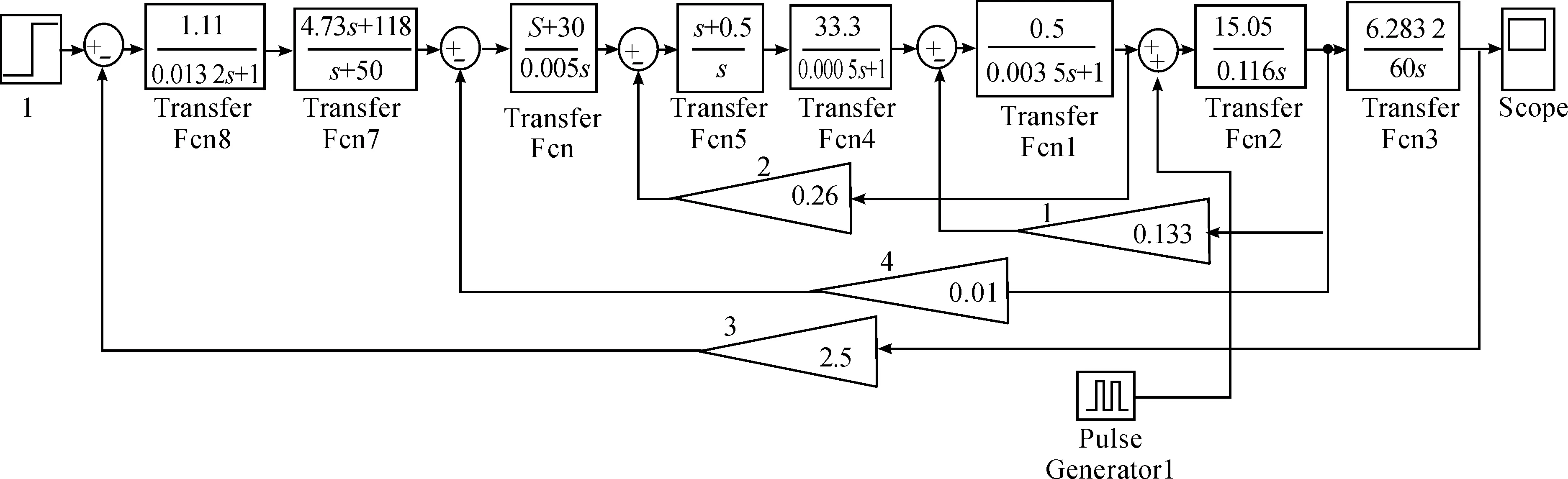
图8 增设转速调节器后系统动态仿真模型
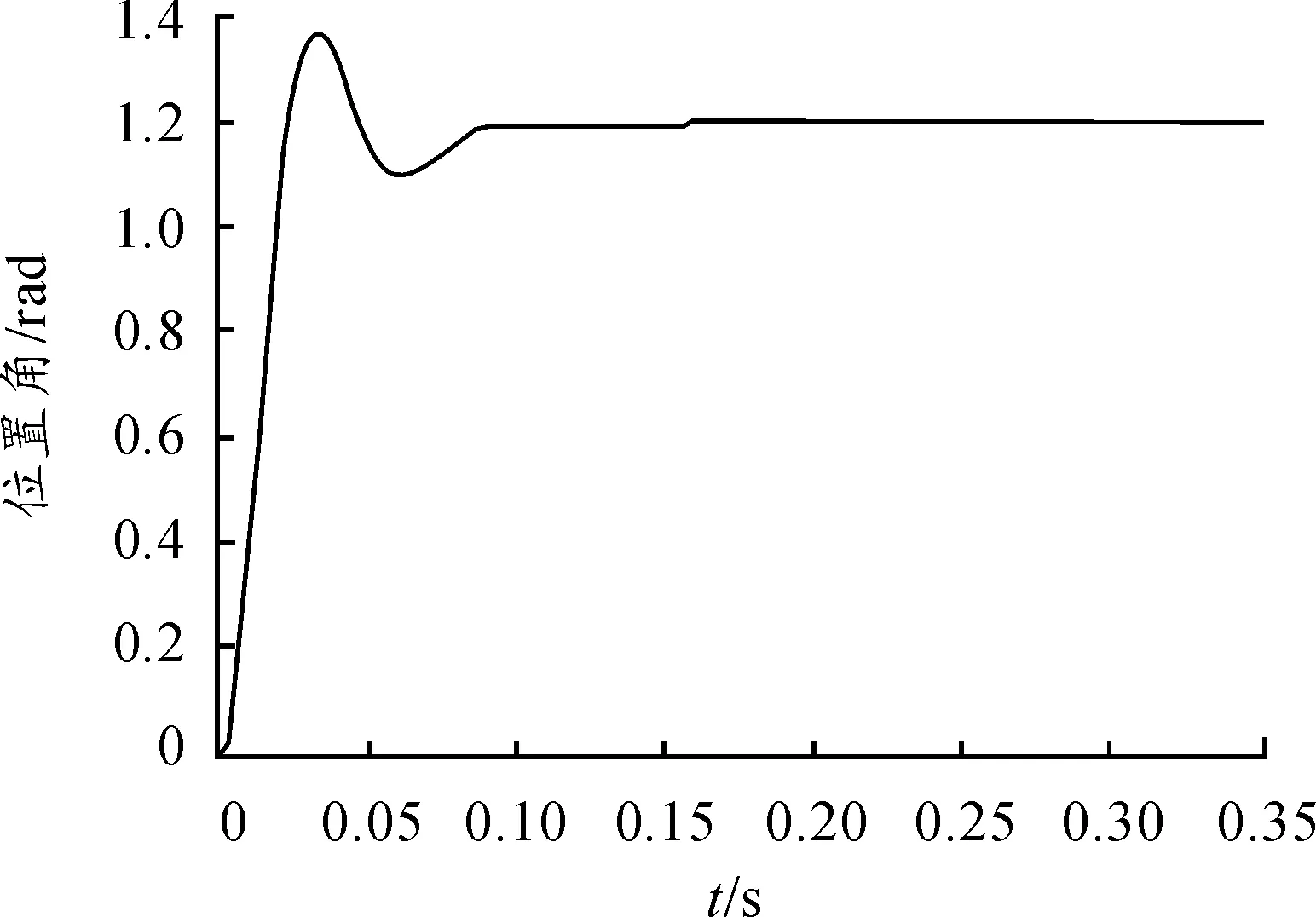
图9 增设转速环后系统位置响应
3基于提高系统抗扰性的变结构控制器运用
上文讨论了系统在理想条件下的激励响应,如果系统中存在干扰呢,输出响应会发生何种变化,为此利用原位置随动系统动态仿真模型做进一步仿真分析,仿真条件如下:激励条件同前,t=0.15 s时电枢电流响应处施加一脉冲干扰,仿真时间0.35 s,其位置输出响应如图10所示。

图10 脉冲干扰下的位置响应
不难发现,系统在受到脉冲干扰时,扰动量所引起的超调量和调节时间都还比较大。也就是在上述位置随动系统中,除响应速度、超调量、稳态误差之外的另一重要指标-抗扰性尚未满足。为了解决这一问题,考虑使用变结构控制器替代位置调节器来实施位置调节控制。
变结构控制(variable structure control,VSC)是一种现代控制理论综合方法,本质上属于非线性控制。变结构控制系统能够通过调整控制器结构的变化,改善系统的动态品质,使得系统调节精度高,响应速度快,具有较强的鲁棒性。尽管结构变化可能给系统带来额外的复杂性,但也使得系统性能保持高于一般固定结构控制所获得的性能,突破了经典控制设计的性能限制,合理地解决了动态性能指标与静态性能指标之间的平衡问题[6]。
考虑采用如图11如示控制策略,图11中变结构控制器的输入为位置偏差信号,输出为经过变结构处理过的控制量。

图11 变结构控制

e(t)为t时刻位置偏差,a为最大加速度,ω(t)为t时刻速度。

4仿真测试与结果分析
采用上述变结构控制器替代位置调节器,即将饱和控制,开方控制,PID控制融合在一起。将变结构控制器控制偏差量设置为Ek=360mil,Es=36mil, a=250mil/s2;仿真条件:Simulink平台,单位阶跃激励,t=0.15s时电枢电流响应处施加一脉冲干扰,仿真时间0.35s,位置调节器控制的随动系统和变结构控制器控制的随动系统在上述同一条件下的位置输出响应如图12所示。

图12 不同控制器下系统对激励和干扰的响应情况
通过仿真结果的比较知,使用变结构控制器替代原先的位置调节器可令被控系统的超调量σ%小,对干扰的抑制效果明显。PID控制中的微分环节D值越大,闭环系统对输出尖波的抑制作用越强,合理地选择各参量,可最大程度上贴近理想的位置输出响应。
5结束语
本文以位置随动系统为研究对象,围绕着增设转速环和转速调节器对系统响应改善这一论题展开论述,运用变结构控制器对原随动系统进行模型改造,旨在增强系统的抗扰能力,在模型仿真计算的基础上,验证了变结构控制模型组建和参数调节的有效性,凸显出基于变结构控制器运用模型在稳定性、响应速度和抗干扰能力等方面的优势。
参考文献:
[1]于存贵,李志刚.火箭发射系统分析[M].北京:国防工业出版社,2012.
[2]卢志刚,吴杰,吴潮.数字伺服控制系统与设计[M].北京:机械工业出版社,2007.
[3]黄永安,马路,刘慧敏.MATLAB7.0/Simulink6.0 建模仿真开发与高级工程应用[M].北京:清华大学出版社,2005.
[4]陶永华.新型PID控制及其应用[M].北京:机械工业出版社,2005.
[5]刘浩,韩晶.MATLABR2014a完全自学一点通[M].北京:电子工业出版社,2015.
[6]陈亮,江明,林园胜.基于PSO算法的PID控制器参数优化研究分析[J].重庆工商大学学报:自然科学版,2014,31(5):77-80.
[7]AdamyJ,FlemmingA.Softvariable-structurecontrols:asurvey[J].Automatica,2004,40(11):1821-1844.
[8]张彦斌,张宁.火炮控制系统及原理[M].北京:北京理工大学出版社,2009.
[9]董震,郭保全,吴霞,等.火炮发射精度优化问题分析[J].计算机仿真,2015(4):51-54.
(责任编辑杨继森)

猜你喜欢
宇航计测技术(2018年3期)2018-09-08
电子制作(2017年17期)2017-12-18
科技创新导报(2017年7期)2017-06-03
汽车文摘(2015年2期)2015-12-15
汽车与新动力(2015年1期)2015-02-27
山东工业技术(2014年21期)2014-08-31
汽车与新动力(2014年6期)2014-02-27
汽车与新动力(2014年3期)2014-02-27
汽车与新动力(2014年2期)2014-02-27
中国新技术新产品(2013年7期)2013-05-12