一种基于误差电压比例记忆的无塔校相方法*
2015-12-25 06:08尚建忠王青松王新宏
电讯技术 2015年9期
尚建忠,王青松,王新宏
(西安卫星测控中心,西安 710043)
1 引言
目前,航天测控系统多采用单脉冲双通道跟踪体制[1],而测控系统下行链路校相功能是保证天线跟踪功能的前提。传统的校相方法需要建设数十米甚至上百米高的标校塔来辅助完成,相对而言成本很高,而且随着我国深空站大天线的建设逐步展开,天线远场条件越来越远,对标校塔的距离和高度的要求越来越高,标校塔的建设从工程上变得不可能了,测控站无塔化成为大趋势。
针对无塔化需求,近年来先后提出了射电星校相[2]、快速校相[3-4]、对星校相[3]、近场校相[5-6]、偏馈辅助校相[7]等校相方法,其中,射电星校相要求高增益、低噪声测控系统,应用范围小;快速校相、对星校相得到了广泛应用,而快速校相是对传统校相方法的过程改进,仍依赖标校塔,对星校相基于对目标星的角度引导精度结合快速校相过程来完成;近场校相仍需标校塔或地面目标源;偏馈辅助校相利用传统校相与偏馈校相结果的经验差值实现校相,依赖于设备组合。
在无塔校相的应用背景下,本文分析了有线通道和偏馈校相的机理,从两种模式中提取了误差电压比例这一关键因素作为校相基准,结合移相器扫描定位的方法进行相位值调整,利用误差电压矢量(长度)记忆进行定向灵敏度调整,实现测控站不依赖于目标特性、设备组合、角度引导精度的快速、准确校相。
2 比例记忆无塔校相原理
在单脉冲双通道跟踪体制下,天线接收到的和、差信号分别经和、差两个信道下传,其中差信道传输的信号是由方位、俯仰差信号移相叠加后的双信号,解调模块对和、差信号进行处理,得到方位、俯仰角误差电压。经过校相处理后,误差电压表达式如下:

式中,VA、VE为方位、俯仰误差电压,GD为增益归一化系数,θ 为目标偏离天线电轴方向的空间角,ψ 为目标相对天线的环向分量,μA、μE为方位、俯仰归一化差斜率,取值与天线结构对称性相关,理想圆口面天线方位、俯仰归一化差斜率相同,记为μ。

由式(3)可见,经过校相处理后,方位、俯仰误差电压比例值只与天线结构特性和目标偏离方向有关,与通道增益、设备组合无关。
假设信号是由有线或偏馈提供,因和、差信号相位差发生改变,则误差电压计算公式将相应改变,但方位、俯仰误差电压比例值仍然存在与天线结构特性和目标偏离方向有关,与通道增益、设备组合无关的特性。利用该比例的稳定性可以实现校相。
2.1 有线模式
在无标校塔情况下,和、差信道信号可由射频源通过功分器注入,如图1 所示,输出的误差电压反映了信号通过功分器、注入电缆以及和、差信道后的相位延迟情况。假设对塔校相后,和、差通道的信号耦合点1、2 到解调器入口的相位延迟分别为(含移相器移相值),有线信号Ucos(ωt)因分别经过不同的电缆注入到耦合点1、2 处信号相位差异为ξ,则解调器输出误差电压反映了)+ξ 值的情况。
经解调电路处理后得

因对塔校相后,和、差信道相位延迟的差异已经由可变移相器消除,假设从馈源到耦合点1、2 的相位延迟差异相对稳定,则为相对稳定的固定值;同时若ξ 值保持相对稳定,则从式(6)看出,有线模式下跟踪模块解调出的方位、俯仰误差电压比值是一个稳定值,与1、2 点之后的设备特性无关。
2.2 偏馈模式
偏馈模式与有线模式类似,只不过下行信号由偏馈天线提供,如图2 所示,通过下行链路及解调电路的处理,可以得出与有线模式相同的结论。

图2 偏馈校相原理图Fig.2 Phase calibration schematic diagram under offset-feed mode
由于偏馈天线下行信号不满足远场条件,其信号表达式较为复杂,为简单起见,可以将偏馈天线等效为偏离于主天线的目标,目标信号可以等效为理想信号,信号经过处理后得误差电压:

从式(9)得到,跟踪模块解调出的方位、俯仰误差电压比值只与等效空间角θ'的环向分量ψ'及归一化差斜率相关,只要安装位置及天线结构稳定,则可以认为等效目标固定不变,即误差电压比值固定不变,与下行链路的设备特性无关。已有的依靠偏馈校相与对塔校相结果的经验偏差实现校相的方法[7]与下行链路相关,一旦下行链路改变,经验差值就会改变。
2.3 定向灵敏度调整

3 稳定性分析
3.1 有线模式稳定性分析
根据图1,注入到耦合点1、2 处信号相位差异为ξ 的稳定性与功分器以及和、差通道注入电缆电长度差异相关,而功分器一般为无源器件,稳定性非常高,其对信号相位延迟的温度稳定性可以忽略,这里主要考虑和、差通道注入电缆长度差异对相位的影响。电缆热胀冷缩及电缆介质介电常数的变化导致电缆电长度变化是ξ 值变化的主要原因,一般来讲,对于S 频段测控系统,该变化可以忽略,对要求高的情况(比如X 频段以上),工程上可以考虑使用稳相电缆或采用相等长度的注入电缆即可解决该问题。由于功分器安装位置的问题,有的设备进场时需要重新安装,可能会导致ξ 值的变化,使试验场记录数据发生一定漂移。针对这种情况,一是可以通过本文的偏馈校相模式(2.2 节)加以校准,或者在有条件情况下进行一次远场校相加以校准;二是建议后续设备研制中,尽量将功分器与馈源安装在一体,与结构部分整体运输,不再拆装。
由于有线校相模式下信号不是经过馈源和、差通道耦合得到的,故从馈源到耦合点1、2 的相位延迟差异的稳定性必须要考虑。理论上讲,馈源及其下行传输波导均为铜铸件,内充介质为干燥的空气,其对和、差信号相位延迟的温度特性只与热胀冷缩有关,由于铜的热膨胀系数为17.7 #10-6/℃,在和、差通道长度相差1 m、温度变化20℃的情况下可以计算得对S 频段信号相位的影响为1 $左右,对校相结果的影响十分有限。
除了温度变化的影响外,还要考虑各部分器件参数的时间漂移。下行跟踪链路硬件组成较为复杂,难以从理论计算得到结果,但可以通过实验的方法来证明。图3 是某测控站实测数据,其横坐标为频率(MHz),纵坐标为方位、俯仰误差电压比例值,第一组测试时间为2014 年10 月26 日,第二组测试时间为2014 年12 月3 日。
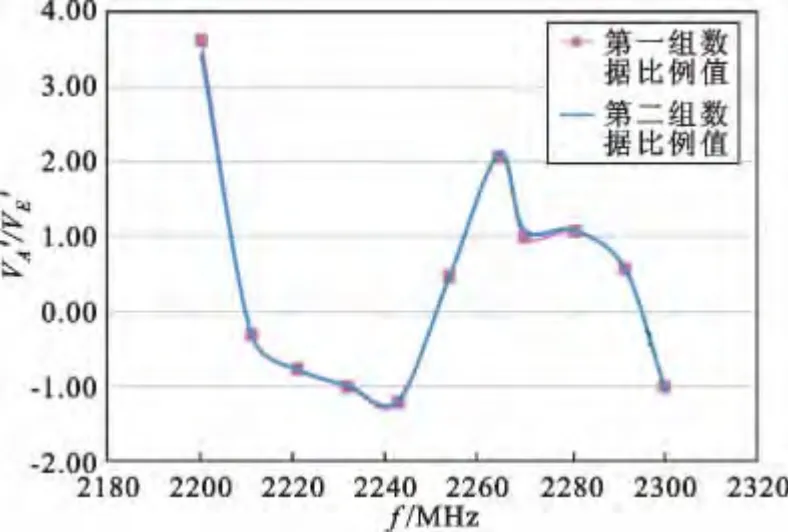
图3 有线模式误差电压比例Fig.3 Error voltage ratio under RF loop mode
由图3 可以看出,校相完成后有线注入信号解调出的误差电压比例值非常稳定。
3.2 偏馈模式稳定性分析
从式(9)得到,偏馈模式下跟踪模块解调出的方位、俯仰误差电压比值只与天线结构稳定性相关。目前,航天测控圆口径天线面的调整由于采用照相法等新技术,现场安装结构精度恢复可以达到毫米量级,有效地保证了本方法的可行性。
设备安装后,结构的稳定性对校相结果的影响可以通过实验测试加以说明。对塔校相后,通过偏馈环回信号进行误差电压比例值测试,得到2 组数据,其中第一组测试时间为2014 年10 月26 日,第二组测试时间为2014 年12 月3 日,见图4。
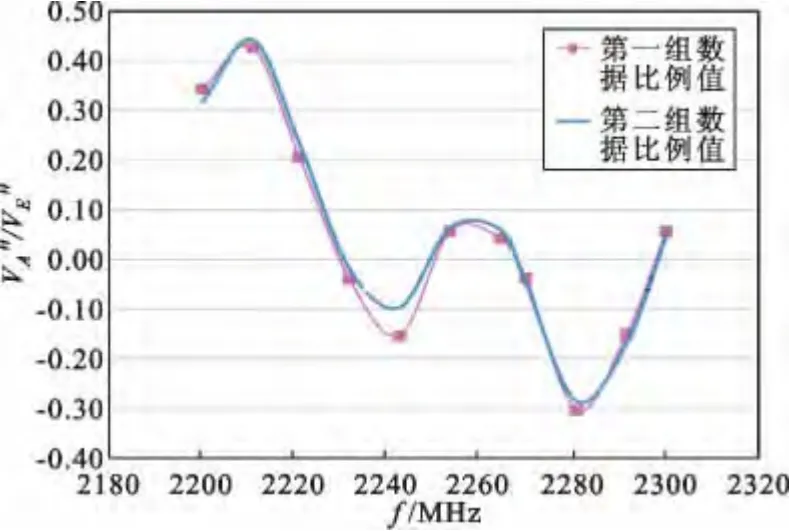
图4 偏馈模式误差电压比例测试结果Fig.4 Error voltage ratio under offset-feed mode
可见,偏馈环回信号误差电压比例值相对于有线信号的稳定性略差,但重复性依旧较高。
4 具体实现
4.1 试验场误差电压比例提取方法
设备在试验场联试阶段,对校相后误差电压特性进行提取并记录,具体步骤如下:
(1)在试验场选择预定频点完成天线对塔校相;
(2)天线转动至俯仰90°(或某一个固定角度),目的是保证天线重力变形一致;
(3)分别在有线模式和偏馈模式下注入射频信号,调整信号电平至中强水平;
(4)分别在有线模式和偏馈模式下分别记录误差电压及其比例值;
(5)更换频点,以5 MHz为间隔,重复上述过程,直到覆盖整个工作频段;
(6)软件对各点数据进行六阶曲线拟合,并存储备用。
4.2 测控站标校方法
设备安装到位后,任务前校相方法如下:
(1)天线转动至俯仰90°(或某一个固定角度);
(2)分别在有线模式和偏馈模式下注入射频信号,调整信号电平至中强水平;
(3)基带设备校相模块通过对和信号360°移相,得到一周内对应的方位、俯仰误差电压值;
(4)根据记录的误差电压比例拟合曲线查找得到相差;
(5)利用误差电压矢量(长度)记忆进行定向灵敏度调整。
5 实验验证
根据上述方法在某测控站S 频段统一测控设备上进行校相实验。设置测控设备闭环在中强电平后对不同频点进行对塔校相,在完成校相的基础上分别记录有线模式和偏馈模式下的方位、俯仰误差电压对,而后在半年内不同时段和气候条件下(白天和晚上),根据记录的误差电压数据选择3个频点以相同配置分别在有线模式和偏馈模式下进行校相,对塔统计跟踪性能,实验结果均满足跟踪精度要求,结果见表1。
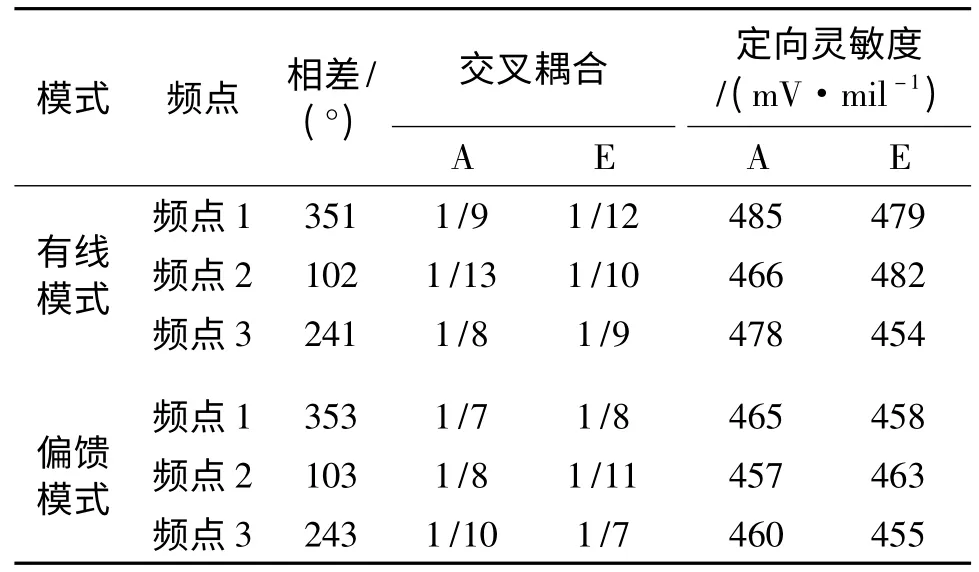
表1 校相结果Table 1 Phase calibration results
从数据可以看出,有线模式和偏馈模式校相结果优于1/7,完全满足测控任务要求。
6 结束语
在对塔校相完成后,有线和偏馈模式下的误差电压比值在较长时间内保持稳定,可以作为无塔校相的依据。
偏馈模式下误差电压比值与偏馈位置和天线结构有关,蕴含空间信息,而与下行链路设备组合及设备特性无关;有线模式下误差电压比值只与功分器后通道有关,与设备特性无关。上述特点致使设备组合更换及设备维修后无需重新标定,实用性较好,是对文献[7]中偏馈校相方法的改进。
该方法无需对现有设备进行改造,只要编制简单的软件模块,就能完成快速、准确的无塔校相,具有很强的实用价值,满足采用单脉冲双通道跟踪体制的测控设备校相需求,不受天线口径大小的限制,具有普遍性。
目前暂未发现例外或本论文难以解释和解决的问题,可以进一步就提高本方法校相精度及稳定性方面展开研究。
[1]刘嘉兴.飞行器测控通信工程[M].北京:国防工业出版社,2010.LIU Jiaxing.Spacecraft TT&C and Communication Engineering[M].Beijing:National Defense Industry Press,2010.(in Chinese)
[2]汪远玲,仇三山,汪晓燕.深空系统低信噪比任意信号角跟踪接收机[J].电讯技术,2009,49(4):45-48.WANG Yuanling,QIU Sanshan,WANG Xiaoyan.An arbitrary- waveform- signals angle tracking receiver for deep space system[J].Telecommunication Engineering,2009,49(4):45-48.(in Chinese)
[3]成亚勇,李玉瑄.双通道角跟踪体制实时校相算法研究[J].无线电工程,2009(5):32-33.CHENG Yayong,LI Yuxuan.Real-time Phase Calibration Arithmetic Research of Dual-channel Tracking System[J].Radio Engineering,2009(5):32-33.(in Chinese)
[4]仇三山.双通道单脉冲跟踪快速校相改进算法[J].四川兵工学报,2013,34(5):96-98.QIU Sanshan.An Improved Fast Phase Adjusting Algorithm for Dual-channel Monopulse IF Tracking Receivers[J].Journal of Sichuan Ordnance,2013,34(5):96-98.(in Chinese)
[5]苏勋,席文君.双通道跟踪接收机对地校相技术[J].电讯技术,2012,52(3):268-272.SU Xun,XI Wenjun.Phase Calibration Technology of Dual- channel Tracking Receiver with Ground Beacon[J].Telecommunication Engineering,2012,52(3):268-272.(in Chinese)
[6]习靖.双通道角跟踪设备的近场相位校准研究[J].测控遥感与导航定位,2013,43(5):32-34.XI Jing.Research on Near- field Phase Calibration of Double- channel Angle Tracking[J].TT&C,Remote Sensing,Navigation and Positioning,2013,43(5):32-34.(in Chinese)
[7]庄传刚,刘莉,李彬.车载测控系统标校过程中校相新方法研究[J].计算机测量与控制,2014,22(7):2234-2236.ZHUANG Chuangang,LIU Li,LI Bin.Research on New Method of Phase-Calibration in TT&C System[J].Computer Measurement & Control,2014,22 (7):2234-2236.(in Chinese)
猜你喜欢
幼儿园(2021年12期)2021-11-06
测控技术(2018年2期)2018-12-09
通信电源技术(2018年3期)2018-06-26
电影故事(2017年10期)2017-07-18
山东工业技术(2016年15期)2016-12-01
太空探索(2016年12期)2016-07-18
通信电源技术(2016年4期)2016-04-04
中国修辞(2016年0期)2016-03-20
火控雷达技术(2016年2期)2016-02-06
西部广播电视(2015年3期)2016-01-15