基于均匀设计的MEMS陀螺温度标定试验设计
2016-02-07 02:50张晓娇李慧鹏蔡晓雯李胜臣王文杰张维睿
中国测试 2016年12期
高 爽,张晓娇,李慧鹏,蔡晓雯,李胜臣,王文杰,张维睿
(北京航空航天大学惯性技术重点试验室,北京 100191)
基于均匀设计的MEMS陀螺温度标定试验设计
高 爽,张晓娇,李慧鹏,蔡晓雯,李胜臣,王文杰,张维睿
(北京航空航天大学惯性技术重点试验室,北京 100191)
针对传统的温度试验方案存在试验量大、耗费时间长的问题,提出基于均匀设计法的三轴微电子机械系统(micro-electromechanical systems,MEMS)陀螺温度标定误差补偿试验方案。设计基于均匀设计的四因素(测试温度点、温变速率、MEMS陀螺转速及转动方向)试验方案。首先,构造试验所需的均匀设计表;其次,根据LP-偏差确定MEMS陀螺温度标定误差补偿实验的最佳试验方案;最后,搭建出MEMS陀螺温度标定的实验装置进行测试。试验结果表明:与将每一个因素的不同水平组合的全面设计方案相比,该试验方案不仅节省12.5%的试验时间,还进一步减少MEMS陀螺温度标定误差试验量,缩短研究周期,节约试验成本。
MEMS陀螺;均匀设计法;温度;标定误差补偿
0 引 言
由于MEMS陀螺主要是用对温度敏感的热敏硅材料制成的硅微机械陀螺仪[1],MEMS陀螺精度及稳定度受温度影响较大。为减小温度对MEMS陀螺精度的影响,通常对MEMS陀螺进行温度标定误差补偿。Jacques[2],Gu[3],Rade等[4]提出了关于温度补偿模型的原理,Gaiffe[5]采用惯性器件温度模型辨识的方法,用来补偿温度误差,降低标度因数、惯性器件偏置的温度系数,但分析复杂。Lee等[6-7]提出提高kalman滤波可观测度的方法,用来提高标定误差的精度,但使用多维状态变量的滤波方法,计算量大,而且时间较长。段志梅等[8]从设计位置的方法分析温度对标度因数以及安装误差的影响,位置标定法利用惯性测量单元输出的数据计算各种误差参数,虽然计算简单,但是测试条件苛刻,需要精确的测试转台。孙亮等[9]提出了在温度变化固定不变时,把陀螺仪标度因子误差模型进行简化的理论,但方法的时效性很差,只适合一次性研究。由于MEMS陀螺组件在进行温度试验时存在耗时长,效率低等缺点,故寻找试验方便、计算简单的温度标定试验方法具有一定的实际意义。为此,结合多位置标定与系统级标定的优势,提出一种基于均匀设计法的温度标定试验方案,该方案可有效减少试验工作量,提高标定效率。
1 试验设计
1.1 均匀设计概念
均匀设计法[10]是继60年代华罗庚教授倡导、普及的优选法和我国数理统计学者在国内普及推广的正交法之后,由中国科学院应用数学所方开泰教授和王元院士于1978年提出的一种将多元统计和数论相结合的一种全新的试验设计方法。该方法适应于多因素、多水平的试验,使数据充分均匀分散,具有更好的代表性[11]。均匀设计法在挑选代表点时不考虑“整齐可比”,而从“均匀分散”的角度出发,可大幅减少试验数目、降低试验工作量。均匀设计法[12]具有以下特点:
1)试验次数少;
2)均匀分散性好;
3)试验次数随因素水平数等量增加,具有更大的优越性;
4)均匀设计表任两列组成的试验方案一般不等价。
均匀设计法中每个因素的每个水平做一次且仅做一次试验并避免了高等级水平在同一次试验中相遇及试验中可能出现的危险。
1.2 构造均匀设计表
均匀设计表的列数总是由试验次数n决定的[15]。当n为素数时,可以获得n-1列;而当n不是素数时,设计表的列数总是小于n-1。如当n=6时,按照均匀设计的均匀性准则运用好格子点法构造均匀设计表,均匀设计表就只有两列,即最多安排两个因素,导致可以安排的因素太少。为了解决此类问题,方开泰等[14]提出将 U7(76)的最后一行去掉构造了U6*(66),如表1所示。

表1 U6*(66)
2)Un表的最后一行全部由水平n组成;
在使用时,要先深入了解均匀设计表,在符合实际的情况下,正确地选用均匀设计法[16]。根据试验因素的水平数设计相应均匀设计表,然后计算相应的偏差,选取均匀设计表的相应列。由于Un表的最后一列所有的试验因素为极限的配比,在实际的工程应用中,先考虑安全因素,再进行试验。
对6因素进行组合有15种试验方法,运用LP-偏差公式计算这15种试验方案的偏差:

式中x1,…,xn为cp中的n个点,v(x)=x1,…,xm为矩形[0,x]的体积,nx为x1,…,xn中落入[0,x]的点数。通过LP-偏差D计算可知a、b、c、f列组合方案的偏差最小为0.2990,则采用此方案如表2所示。
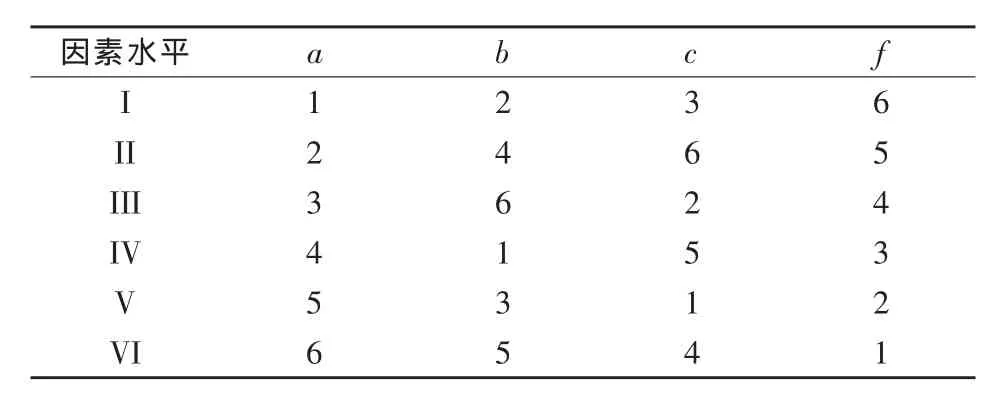
表2 U6*(64)
1.3 方案设计
如引言所述,温度变化对MEMS陀螺输出精度有较大的影响。为减小温度对精度的影响,对MEMS陀螺进行温度标定补偿[17-18]。由于试验采用的三轴MEMS陀螺的工作温度环境要求在-40~80℃之间,并且要求其可承受的温变速率在-60~120℃/h之间,MEMS陀螺工作时存在着升温和降温两个过程,而变温过程存在于温度区间中,设计MEMS陀螺温度标定补偿为四因素实验方案,即测试温度点、温变速率、MEMS陀螺转速及转动方向。为保证试验的准确性,对各个因素的具体水平值的要求是使试验设计尽可能地等均匀的分布在MEMS陀螺工作的温度区间和转速区间。试验设计如下:
1)温度:-40,-20,0,20,60,80℃;
2)温变速率:60,70,80,90,100,120℃/h;
3)转速:1,10,100,200,300,400°/s;
4)转向:正转、反转、正转、反转、正转、反转。
均匀设计表是一个n行m列的方阵,每一行是{1,2,…,n}的一个置换(即1,2,…,n的重新排列),参照表2将试验因素的水平安排到对应的位置,如表3所示。以第2组试验为例,选取的温度试验点为-20℃,从-40℃到-20℃是一个升温的过程,温变速率为 90℃/h,陀螺以 400°/s的转速正向转动。MEMS陀螺温度标定试验按照表3中的设计方案进行,依次进行6组试验。

表3 U6*(64)*
2 应用案例
2.1 建立误差模型
定量分析温度对三轴MEMS陀螺精度的影响,从惯性器件机理入手建立机理模型比较困难[19-20]。目前为减小温度对标定误差的影响主要是利用系统在各温度点的测试输出数据建立补偿模型。
误差模型如下:

式中:Fgx,Fgy,Fgz——MEMS陀螺x、y、z轴输出;
ωx,ωy,ωz——MEMS陀螺x、y、z轴输入;
Egxx,Egyy,Egzz——MEMS陀螺标度因数;
Egij(i,j=x,y,z;i≠j)——MEMS陀螺的安装误差系数。
当MEMS陀螺仪的输入精度高于15.04°/h时[21],惯导系统的输出角速率值分别为

式中:ωx、ωy、ωz——沿MEMS陀螺x、y、z轴输入角速率;
ωie——地球自转角速率,ωie=15.04°/h;
φ——当地纬度[22],φ=39.58°;
ωx,ωy,ωz——MEMS陀螺x、y、z轴的输出。
由于本试验采用的MEMS陀螺的精度大于100°/h,在速率标定中不再考虑ωie对MEMS陀螺的影响[19],由此可得MEMS陀螺速率标定中MEMS陀螺x、y、z轴输出的角速率值分别为

将陀螺置于双轴温控速率转台上,转台的旋转轴与天向垂直,与当地垂线间误差不超过规定值,使陀螺的敏感轴平行于旋转轴,误差不超过规定值[23]。按照表4所设计的试验方案依次进行。
2.2 数据分析
试验采用的三轴MEMS陀螺对地球速率不敏感,其性能不受地球自转加速度的影响,将三轴MEMS陀螺置于东北天的位置如图1所示,求取零偏值。
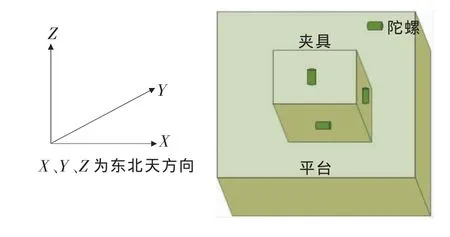
图1 MEMS陀螺测试实验装置原理图
计算MEMS陀螺组件的标度因数误差和安装误差系数时用到MEMS陀螺动态和静态试验数据相结合[24-25],采用最小二乘法和循环迭代法逐次分离MEMS陀螺标度因数误差和安装误差系数。标度因数和安装误差角的系数如表4所示。

表4 MEMS陀螺温度标定误差
把表中的各项误差值补偿到三轴MEMS陀螺中,按照设计的方案进行数据采集,获得补偿后各项试验数据。由图2零漂补偿前后对比图所示,补偿后的MEMS陀螺的零漂都有所减小,且补偿后的MEMS陀螺稳定性也有增强。可知,MEMS陀螺的零漂受温度影响,对MEMS陀螺进行误差补偿是有一定的实际意义。
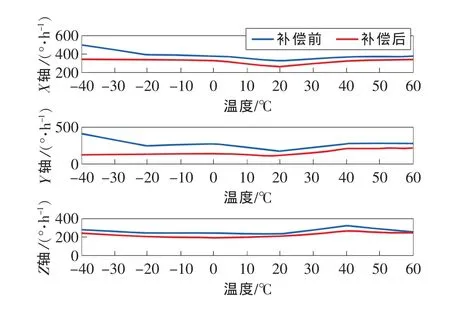
图2 MEMS零漂补偿前后对比图
3 结束语
与全面设计试验相比,采用基于均匀设计法的MEMS陀螺温度标定误差补偿试验方案节省了12.5%的时间。各试验温度点的稳定性都有提高,证明了试验方案具有可行性。该试验方案有效缩短了温度标定试验周期、提高了试验效率、节约试验了成本,有助于减小温度对MEMS陀螺精度的影响。本文是在没有考虑输出噪声影响的条件下进行的MEMS陀螺的误差补偿,后续可对MEMS陀螺输出数据进行噪声处理,可进一步提高MEMS陀螺的精度。
[1]毛奔,张晓宇.微惯性系统及应用[M].哈尔滨:哈尔滨工程大学出版社,2013:35-48.
[2]JACQUES G,ABOELMAGD N,MICHAEL J,et al.Lowcost three-dimensional navigation solution for RISS-GPS integrated using mixture particle filter[J].IEEE Transactions on Vehicular technology,2010,59(2):599-615.
[3]GU D Q,NASER E.Heading accuracy improvement of MEMS IMU-DGPS integrated navigation system for land vehicle[C]∥IEEE.New York:IEEE,2008:1292-1296.
[4]RADE S,STEVICA G.The integration of strap-down INS and GPS based on adaptive error damping[J].Robotics and Autonomous Systems,2010,58(1):1117-1129.
[5]GAIFFE T,COTTREAU Y,FAUSSOT N,et al.Highly compactfiberoptic gyrocompass forapplications at depths up to 3 000 meters[C]∥International Symposium on Underwater Technology,2000:155-160.
[6]LEE J,PARK C,PARK H.Multi-position alignment of strap-down inertial navigation system[J].IEEE Transaction on Aerospace and Electronic System,1993,29(4):1323-1328.
[7]FAUSSOT N.Standard specification format guide and test procedure for single axis interfero-metric fiber optic gyros[C]∥IEEE Std.New York:IEEE,2012:952-1997.
[8]段志梅.基于混沌理论的光纤陀螺仪温度非线性建模[J].激光杂志,2016,37(1):59-62.
[9]孙亮,余震虹,陈浩,等.闭环光纤陀螺零偏与标度因数的综合补偿[J].仪表技术与传感器,2014(6):1-3.
[10]谢愈,郑伟,汤国建.基于均匀设计的神经网络建模在惯导工具误差模型弹载验证试验方案优化中的应用[C]∥均匀试验设计学术交流会论文集,2007:189-194.
[11]张国秋,王文璇.均匀试验设计方法应用综述[J].数理统计与管理,2013,32(1):89-99.
[12]于昌龙,张红线,吴衍记,等.基于均匀设计的光纤陀螺温度建模试验方案研究[J].红外与激光工程,2009,38(2):330-334.
[13]孙英杰.光纤陀螺温度漂移误差建模及补偿技术研究[D].哈尔滨:哈尔滨工业大学,2010.
[14]方开泰,马长兴.正交与均匀试验设计[M].北京:科学出版社,2001:96-103.
[15]方开泰.均匀设计与均匀设计表[M].北京:科学出版社,1994:35-41.
[16]艾纯明,吴爱祥.基于均匀设计实验的膏体配比优化[J].科技导报,2016,34(2):210-214.
[17]AGGARWAL P,SYED Z,NIU X,et al.A standard testing and calibration procedure for low cost MEMS inertial sensors and units[J].The Journal of Navaigation,2008(61):323-336.
[18]BLIN S,HK K.Reduced thermal sensitivity of a fiber-optic gyroscope using an air-core photonic-bandgap fiber[J]. Lightwave Technology Journal,2007,25(3):861-865.
[19]于洵,申双琴,徐岩,等.一种基于陀螺的炮塔转角动态高精度测量方法[J].国外电子测量技术,2012,31(12):36-39.
[20]周红进,钟云海,易成涛.MEMS惯性导航传感器[J].舰船科学技术,2014,36(1):115-121.
[21]彭孝东,陈瑜,李继宇,等.MEMS三轴数字陀螺仪标定方法研究[J].传感器与微系统,2013,32(6):63-65.
[22]DZHASHITOV V,PANKRATOV V.The determined chaos in disturbed by temperature dynamic systems with gyros[C]∥IEEE on Physics&Control.Washington DC:IEEE,2003:638-643.
[23]袁建国,袁艳涛,刘飞龙.MEMS陀螺仪的一种新颖高精度标定算法研究[J].重庆邮电大学学报,2014,26(5):666-669.
[24]DZHASHITOV V,PANKRATOV V.Using the method of elementary balancesforanalysisand synthesisof thermal control system for FOG SINS based on peltier modules[J].Gyroscopy&Navigation,2014,5(4):245-256.
[25]王励扬,翟昆朋,何文涛,等.低成本MEMS陀螺实时滤波方法[J].电子技术应用,2015,41(1):50-52.
(编辑:李妮)
The temperature calibration of MEMS gyro experiment design based on uniform design
GAO Shuang,ZHANG Xiaojiao,LI Huipeng,CAI Xiaowen,LI Shengchen,WANG Wenjie,ZHANG Weirui
(Key Laboratory on Inertial Science and Technology,Beihang University,Beijing 100191,China)
In order to improve time-consuming traditional temperature test programs requiring substantial amount of testing,a temperature calibration error compensation method of three-axis MEMS gyro based on uniform design method was proposed.One temperature calibration compensation testing program based on four factors was designed.The four factors include testing temperature point,temperature changing rate,MEMS gyro speed and direction of rotation.Firstly,the uniform design table wasestablished.Secondly,the besttestmethod ofMEMS gyro temperature calibration error compensation was determined according to LP-deviation test program. Finally,the MEMS gyro temperature calibration experimental device was built.The test results show that the designed method which compared different levels of each factor saved 12.5%testing timecompared with the traditional design.This test program contributes to reduce the amount of experiments,shorten the research cycle and save experimental cost.
MEMS gyro;uniform design method;temperature;calibration error compensation
A
:1674-5124(2016)12-0008-04
10.11857/j.issn.1674-5124.2016.12.002
2016-03-10;
:2016-04-29
高 爽(1977-),女,陕西咸阳市人,讲师,博士,研究方向为惯性导航。
猜你喜欢
汽车维修与保养(2020年11期)2020-06-09
制造技术与机床(2019年12期)2020-01-06
小学生学习指导(低年级)(2019年10期)2019-10-16
智富时代(2019年2期)2019-04-18
智富时代(2019年2期)2019-04-18
学生天地(2019年6期)2019-03-07
军事文摘(2018年24期)2018-12-26
快乐语文(2018年36期)2018-03-12
中国惯性技术学报(2017年1期)2017-06-09
电子制作(2017年23期)2017-02-02