
工作空间机器人末端轨迹的滑模控制
2016-02-07 06:42沈显庆郑俊翔王明杰刘继红
黑龙江科技大学学报 2016年6期
沈显庆, 郑俊翔, 唐 巍, 王明杰, 刘继红
(1.黑龙江科技大学 电气与控制工程学院, 哈尔滨 150022; 2.黑龙江科技大学 哈尔滨煤矿机械研究所,哈尔滨 150036;3.哈尔滨工业大学 自动化测试与控制研究所, 哈尔滨 150001)
工作空间机器人末端轨迹的滑模控制
沈显庆1, 郑俊翔1, 唐 巍1, 王明杰2, 刘继红3
(1.黑龙江科技大学 电气与控制工程学院, 哈尔滨 150022; 2.黑龙江科技大学 哈尔滨煤矿机械研究所,哈尔滨 150036;3.哈尔滨工业大学 自动化测试与控制研究所, 哈尔滨 150001)
为了提高工业机器人轨迹跟踪性能,针对传统控制器存在的启动输出转矩大、误差收敛速度慢和抖振等问题,提出了一种应用于机器人工作空间的基于改进型双幂次指数趋近律的滑模控制律设计方法。在工作空间位置坐标的动力学方程基础上,通过改进指数趋近律的方法,将基于饱和函数的双幂次指数趋近律运用在终端滑模控制器设计中,实现了对工作空间下末端轨迹的直接控制,在Simulink环境下对比分析了两种趋近律设计滑模控制律的控制效果。结果表明:基于该方法所设计的控制器具有良好的鲁棒性和控制精确度,同时有效地削弱了抖振。
机器人; 滑模控制; 趋近律; 轨迹跟踪
0 引 言
当前,工业机器人前沿技术和产业发展迅速,在生产中应用日趋广泛,已成为现代设备制造业中重要的自动化装备。机器人高级控制策略和智能控制成为近年来控制科学领域探索研究的前沿课题。滑模变结构控制由于快速性好、计算量小、无超调、实时性强,能对系统进行精确地轨迹跟踪控制,成为近年来机器人高级控制研究的热点,它能有效解决传统控制器存在启动输出转矩大、误差收敛速度慢等问题,然而抖振问题仍是在实际应用中的障碍。
国内外许多学者从趋近律的角度提出了不同解决抖振对策,高为炳[1]提出了设计趋近律的概念,为缩短趋近时间以及削弱抖振提供了可行性的办法。盛严等[2]提出了一种指数趋近律,可从较大的趋近速度逐渐减少到零,有效缩短了趋近时间。Yu等[3]通过将指数趋近律与单幂次趋近律组合,使趋近过程更加平滑,但到达切换面系统后仍存在抖振。Jiang等[4]将模糊控制与指数趋近律结合,利用模糊规则动态调节趋近律中的增益,使系统的动态品质得到进一步改善,消除了高频抖动。Bandyopadhyay等[5]将改进的单幂次趋近律与积分滑模面相结合设计控制律,但趋近时间有待提高。文献[6-7]提出了一种全局快速收敛的双幂次趋近律。文献[8-10]在趋近律加入了自适应项,可自适应调节增益,有效提高了趋近速度并削弱了抖振。张瑶等[11]将多幂次趋近律应用于航天器姿态控制,并通过详细推导验证了所设计趋近律的优越性和可行性。笔者在对机械臂的动力学特性和趋近律特性分析的基础上,将基于饱和函数的双幂次指数趋近律和终端滑模面应用于机器人控制器的设计中,实现对工作空间下末端轨迹的直接控制。
1 机械手动力学模型
对于被控对象为一个刚性n关节机械手,根据拉格朗日方法,其动力学方程为[12]



(1)
式中:D(q)Rn×n——机械手的惯性矩阵;

D(q)Rn——重力向量;
qRn——表示关节角度量;
τRn——电机施加的关节扭矩;
τdRn——外加干扰。
mi——mi=P+Pl;

q1、q2——关节1和关节2的角位移;
mα、mβ——关节1和关节2的质量;
l1、l2——关节1和关节2的长度;
g——重力加速度。
为了实现末端执行器的空间位置控制,需要针对工作空间设计直接的方法,建立基于末端位置的动力学方程。根据机械手关节力矩τ与末端执行力Fx之间存在线性映射关系,通过静力学中的虚功原理[13]可得
Fx=J-T(q)τ。
根据文献[14]中推导过程,得到基于末端位置坐标(x1,x2)的动力学方程
(2)
式中:Dx(q)=J-TD(q)J-1;

Gx(q)=J-TG(q);
fd=J-Tτd。

2 滑模控制器的设计
变结构控制系统的结构动态控制过程,根据系统当前的状态偏差及偏差导数的变化,通过跃变的方式按照设定的规律作动态改变。滑模变结构作为一类特殊的非线性控制方式,该类系统将在状态空间预先设定一个切换曲面,由不连续的控制律,不断变换控制状态相结构,使其沿着这个预定的切换曲面向平衡点滑动,最后系统渐近稳定至平衡点。机械手末端轨迹跟随的驱动力矩可用位置、速度的变化方式以设定规律趋向滑模面加以控制。系统从任意的初始状态趋向切换面,趋近运动s→0的过程,如图1所示。

图1 系统变结构的相轨迹
2.1 趋近律的设计
滑模变结构过程包括趋近运动和滑模运动两个环节。趋近运动中滑模可达性条件仅保证由系统状态空间任意起始运动点在限定时间内到达切换面,对于其具体运动轨迹未作任何限制,因此,采用趋近律的方法可以有效改善趋近运动的动态品质。
典型的指数趋近律表示为

(3)
传统指数趋近律存在一些不足,虽然在等速趋近律的基础上增加了指数趋近项,利用指数趋近能缩短趋近时间,一定程度上抑制抖振,但等速项存在使系统不能从根本上消除抖振,控制器性能仍有提升的空间。鉴于传统幂次趋近律能平滑进入滑动模态特点,文中在指数趋近律与幂次趋近律相结合的基础上,对变结构过程进行了改进,设计了一种改进型双幂次指数趋近律,综合了两者的优点,从而改进了指数趋近律。由于典型控制器含有不连续符号函数sgn(s),控制器的力矩输出必然会出现抖振现象。由于双曲正切函数是光滑的,可使输出平滑,因此,采用双曲正切函数来代替符号函数,提升系统抑制抖振的性能。最后,设计的基于饱和函数的改进型双幂次指数趋近律表示为:
(4)
其中,ε1>0,ε2>0,k>0,1>α>0,β>1。
文中提出的趋近律原理与传统趋近律相似,以s=1为临界值,将系统到达滑模面分为两个阶段。式(4)中,当|s|<1时,α值越小,系统状态的趋近速度越快,β越大,-ε2|s|βtanh(s/δ)项在式中所起的作用越小,可忽略后项对系统的影响;当|s|>1时,α值越小,-ε1|s|αtanh(s/δ)项在式中所起的作用越小,可忽略前项对系统的影响,β越大,系统状态的趋近速度越快。式(4)中前两项,相当分阶段控制,需增加指数项ks来缓解系统分界过程中的不连续性,从而削弱系统的抖振,保证系统的稳定性。
2.2 控制律的设计
机械手滑模控制系统的结构设计,如图2所示。

图2 机械手滑模控制结构
设计的变结构控制器如下,定义误差:

(5)
式中:e——机械臂末端位置的跟踪误差;

为了提高收敛性能,采用Terminal滑模控制策略[15-17],在切换面的设计中引入非线性函数,使得切换面上跟踪误差能在有限时间内收敛到零。
定义终端滑模切换面[15]

(6)
式中:Λ——一个正定矩阵;
p、q——正奇数,q>p。
定义参考变量
(7)

于是,则有

(8)
整理得

(9)
取常用的趋近律式(3)代入式(9)可得控制律:

(10)
式中:ε>0,K>0。


(11)
式中:ε1>0,ε2>0,k>0,δ>0。
2.3 稳定性证明
对改进的滑模控制器进行稳定性分析时,将式(11)代入式(2),得

(12)

(13)
由于Dx(q)为对称正定,则可选取Lyapunov函数
(14)
将定义的Lyapunov函数求导后代入式(14)得
(15)
结合(13)可得

(16)
收敛性分析,由Barlalat引理得e是连续的,则当t→∞时,e→→0,即s指数收敛,位置误差e和速度误差指数收敛。
3 仿真结果与分析


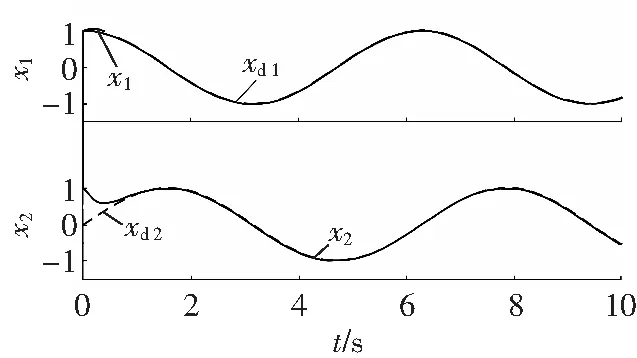
a 末端节点的位置跟踪

b 末端节点的速度跟踪
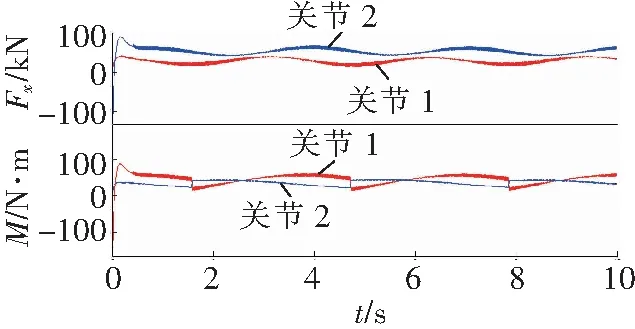
c 控制输入Fx和M

d 轨迹跟踪效果

a 末端节点的位置跟踪

b 末端节点的速度跟踪
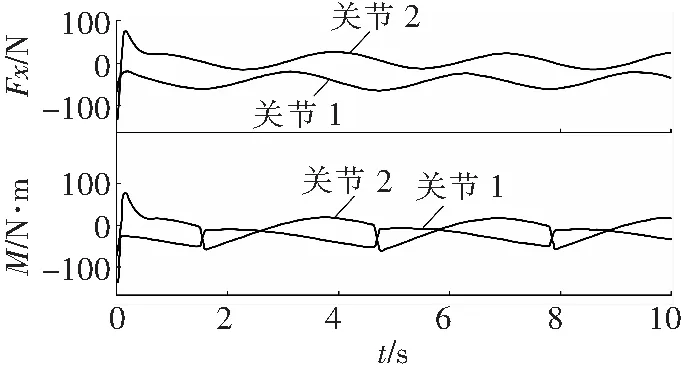
c 控制输入Fx和M
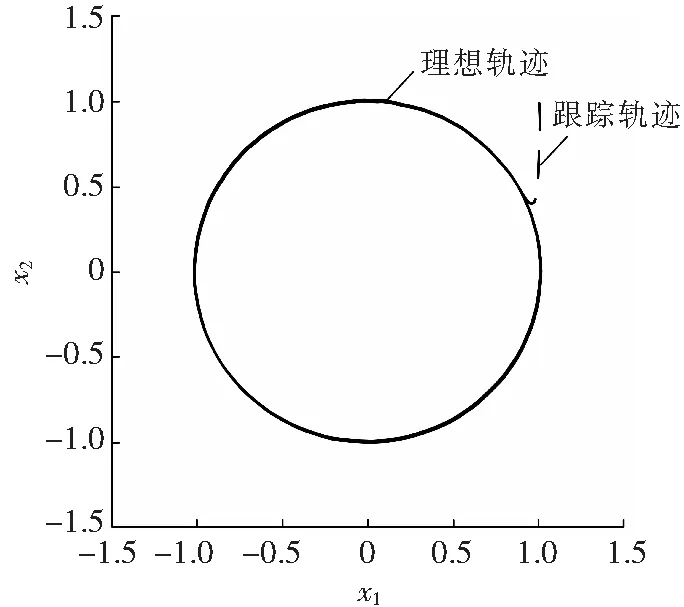
d 轨迹跟踪效果

4 结束语
针对机器人跟踪控制器存在的问题,以加快误差收敛速度和降低抖振、改善趋近运动的动态品质作为优化目标,提出了改进指数趋近律的设计思想和方法,给出了基于饱和函数的改进型双幂次趋近律滑模控制策略,解决了以往控制器启动输出力矩大、跟踪速度慢,典型趋近律滑模控制力矩输出存在抖振等问题,使轨迹跟踪的误差收敛速度和抑制切换抖振达到最佳。改进的控制律使系统相状态可根据与切换面距离,自适应地调节主导趋近规律,从而使系统具有良好的鲁棒性和控制精确度,同时有效地消除了抖振。为进一步研究滑模控制在笛卡尔空间下机械手末端位置跟踪的应用提供了参考。
[1] 高为炳. 变结构控制的理论及设计方法[M]. 北京: 科学出版社, 1996.
[2] 盛 严, 王 超, 陈建斌, 等. 结构滑模控制的一种指数趋近律方法[J]. 噪声与振动控制, 2002, 8(4): 31-35.
[3] YU S H, YU X H, SHI R B, et al. Continuous finite-time control for robotic manipulators with terminal sliding mode[J]. Automatica, 2005, 41(11): 1957-1964.
[4] JIANG K, ZHANG J G, CHEN Z M. A new approach for the sliding mode control based on fuzzy reaching law[C]// Proceedings of the 4th World Congress on Intelligent Control and Automation, China: Shanghai, 2002: 656-660.
[5] BANDYOPADHYAY B, FULWANI D, PARK Y J. A robust algorithm against actuator saturation using integral sliding mode and composite non-linear feedback[C]// Processdings of the 17th IFAC World Congress. COEX, Korea, South: IFAC, 2008: 14174-14179.
[6] 梅 红, 王 勇. 快速收敛的机器人滑模变结构控制[J]. 信息与控制, 2009, 38(5): 552-557.
[7] 李 鹏, 马建军, 郑志强, 等. 采用幂次趋近律的滑模控制稳态误差界[J]. 控制理论与应用, 2011, 28(5): 619-624.
[8] 姜 君, 陈庆伟, 郭 健, 等. 基于新型趋近律的动中通系统滑模稳定跟踪控制[J]. 控制与决策, 2011, 26(12): 1904-1908.
[9] 徐 杰, 柴发武. 基于改进趋近律的机械臂非奇异终端滑模控制[J]. 黑龙江科技大学学报, 2016, 26(2): 192-196.
[10] 翟伟娜, 葛运旺, 宋书中, 等. 基于改进趋近律的机械手滑模控制[J]. 信息与控制, 2014, 43(3): 300-305.
[11] 张 瑶, 马广富, 郭延宁, 等. 一种多幂次滑模趋近律设计与分析[J]. 自动化学报, 2016, 42(3): 466-471.
[12] 蔡自兴, 谢 斌. 机器人学[M]. 北京: 清华大学出版社, 2015.
[13] 大熊繁. 机器人控制入门[M]. 卢伯英, 译. 北京: 科学出版社, 2002.
[14] 刘金琨. RBF神经网络自适应控制MATLAB仿真[M]. 北京: 清华大学出版社, 2014: 175-182.
[15] FENG Y, YU X H, MAN Z H. Non-singular terminal sliding mode control of rigid manipulators[J]. Automatica, 2002, 38(12): 2159-2167.
[16] TAO C W, TAUR J S, CHAN M L. Adaptive fuzzy terminal mode controller for linear systems with mismatch time-varying uncertainties feng [J]. IEEE Transactions on Systems, 2004, 34(1): 255-262.
[17] KARAYIANNIDIS Y, ROVITHAKIS G, DOULGERI Z. Force position tranking for a robotic manipulator in comliant contact with a surface using neuro-adaptive control[J]. Automtica,2007, 43(10): 1281-1288.
(编校 李德根)
Study on trajectory of manipulators end-effector based on sliding mode algorithm in task space
ShenXianqing1,ZhengJunxiang1,TangWei1,WangMingjie2,LiuJihong3
(1.School of Electrical & Control Engineering, Heilongjiang University of Science & Technology, Harbin 150022, China;2. Harbin Coal Mine Mechanical Research Institute, Heilongjiang University of Science & Technology, Harbin 150036, China; 3. Automatic Test & Control Institute, Harbin Institute of Technology, Harbin 150022, China)
This paper presents a novel design approach for sliding mode control law based on an improved double power exponential reaching law——a method aimed at improving the trajectory tracking performance of industrial robot as a viable solution to the drawbacks inherent in traditional controllers, such as a higher starting output torque, a lower error convergence speed and chattering. The research building on the dynamics equations in task space coordinates involves improving exponential reaching law and applying the double power exponential reaching law with the saturation function for designing a terminal sliding mode controller; and thereby achieving the direct control of end-effector’s trajectory in task space. The study is validated by the simulation experiment under the environment of Simulink and subsequent comparison of the control effects of different controllers under two reaching laws. The results demonstrate that this proposed method may provide a control system with a better robustness, a greater control precision, and an effective chattering reduction.
robot; sliding mode control; reaching law; trajectory tracking
2016-10-17
黑龙江省教育厅科学技术研究项目(12541697)
沈显庆(1969-),男,吉林省通化人,教授,博士,研究方向:先进伺服系统与智能控制,E-mail:shenxianqing2001@163.com。
10.3969/j.issn.2095-7262.2016.06.019
TP273
2095-7262(2016)06-0681-06
:A
猜你喜欢
读友·少年文学(清雅版)(2020年4期)2020-08-24
读友·少年文学(清雅版)(2020年3期)2020-07-24
中国惯性技术学报(2019年6期)2019-03-04
制造技术与机床(2018年11期)2018-11-23
现代装饰(2018年5期)2018-05-26
河北农机(2017年12期)2018-01-20
北京航空航天大学学报(2017年4期)2017-11-23
制造技术与机床(2017年4期)2017-06-22
中国三峡(2017年2期)2017-06-09
北京航空航天大学学报(2016年7期)2016-11-16
