智能农业机器人定位导航新方法
2016-03-13 08:15纪素娟
现代商贸工业 2016年2期
纪素娟
(郑州财经学院,河南 郑州 450001)
1 引言
随着国家经济的不断发展,作为国家民生的根本产业——农业,从各方面都在开展着数字化、智能化建设,在广大的平原地带,采用无人设备耕种和遥控机器人耕种已成为农业耕种的新气象,而对应一些山区环境地带数字化和智能化的进展较为缓慢,其主要原因一是由于山区环境多无法实现卫星信号的全面覆盖,导致农业设备定位精度无法满足作业需求;二是地形大多为梯田形式增加了自动化设备的作业难度;三是相应的作业设备自动化程度较低。为了更好的在山区等复杂环境实现智能化耕作设备使用,急需一种全新定位导航的方法来解决机器人的精准定位问题。针对上述情况,本文提出一种结合惯导的超宽带定位方法,配合履带传动机制,完美实现农业机器人在多种复杂环境下作业,满足了农业智能化、数字化快速发展的需求。
2 超宽带定位导航系统介绍
山区、丘陵等环境下卫星信号一般较差或者无法获得,无法通过卫星信号定位,采用本文提出了智能农业机器人新的定位方法——基于惯性导航的超宽带定位导航系统,在机器人作业的区域提前架设基站,通过对定位标签的高精度定位,定位精度达到10厘米,其精度能完全满足机器人作业的精度需求。
超宽带高精度实时定位技术是一种无载波、高精度、高可靠性的定位技术,利用纳秒至微微秒级的非正弦波窄脉冲传输数据。有人称它为无线电领域的一次革命性进展,认为它将成为未来短距离无线通信的主流技术。超宽带技术通过在较宽的频谱上传送极低功率的信号,UWB具有抗干扰性能强、传输速率高、带宽极宽、功耗极小等诸多优势。采用UWB进行设备之间的通信,利用其亚纳秒级的脉冲信号测量距离可以达到厘米级精度。
超宽带定位导航系统组成包括:定位基站、定位标签、定位引擎和中心服务器。在农业机器人的头部安装超宽带定位导航系统标签,可以使机器人在制定作业区域内实现无盲区的精准作业。
超宽带定位导航系统是一款基于脉冲超宽带(IR-UWB)技术,为有效解决室内、矿井、隧道等卫星信号无法覆盖区域的定位,而开发的高精度实时定位产品。超宽带定位导航系统基于802.15.4a技术标准,兼容820.15.4.2011标准。系统发射的功率谱密度不大于-41.3dBm/MHz,选用带宽为500MHz的信道,发射功率仅40μW,辐射极小。纳秒级的窄脉冲具有较高的时间分辨率,能将直达信号和多径信号分离,具有较强的抗多径干扰能力,结合优化的定位算法,保证在室内等多径效应显著的应用场合的高精度定位。同时自组网的无线连接架构,使系统部署更简单、稳定可靠。
超宽带定位导航系统包括感知层、网络层和应用层三部分。定位系统感知层包括定位基站(分为主Master和从Slaver两种)、定位标签(Tag);网络层为基站向服务器发送数据的通道可以为有线网或无线网;应用层主要包括定位引擎和终端软件,可在PC客户端和手机APP上显示。定位系统通过定位区域的扩展可以实现定位空间无限扩展,机器人安装定位标签后可以按照实现预定的作业路线在各个作业单元进行精准作业,并可通过定位平台软件,将机器人真实地以虚拟动态方式实时显示出来,以供使用者监督和查看。
3 超宽带定位工作原理
超宽带定位导航系统,是基于三基站的TDOA(信号到达时间差)定位算法,定位原理如图1所示。设有N1、N2和N3共三个基站参与了定位行动,它们与移动台N之间的距离分别为R1、R2、R3,那么移动台到基站N1和N2的距离差为R12=R2-R1,由解析几何中双曲线的定义可知,移动台M一定在以N1、N2为焦点,且两焦点距离差恒为R12的双曲线上。同理,由基站N2和N3,以及距离差R13=R3-R1,也可以确定一个双曲线,移动台N必定也位于这个双曲线上。由此可知,满足上述要求的点只可能是两组双曲线的交点,亦即移动台N的位置。所以,TDOA定位法又称为双曲线定位法。ULocTM定位系统就是根据双曲线定位法来确定Tag的位置的。
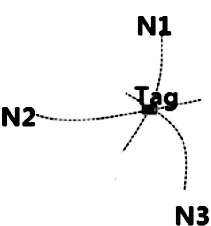
图1 TDOA定位实现原理图
4 具体实现
具体实现可以从四个方面进行。
4.1 地图的构建
首先对需要进行作业的区域进行地图构建,通过全站仪、激光测距仪等仪器进行地图数据采集,并通过3DMax等软件构建三维或二维地图,并将构建好的地图导入到中心服务器的地图模块中。
4.2 感知层的搭建
在所需机器人工作区域架设基站,可以按离地面的相对高度3.5米左右进行架设,无论是平地还是梯田,为了能保证信号的全面覆盖,可将检测区域划分为若干网格,保证待作业机器人在每个区域,至少有3个接收机接收到UWB标签的发射信号,以完成精确定位。定位基准站布设如图2所示:红色为定位基站的架设位置。
4.3 结合惯导实现无盲区作业
标签安装在机器人头部,便于发射超宽带信号,为了能使机器人实现无盲区全区域进行作业,加入惯导方式,其方法如下:若在t时刻和t+T1时刻定位标签均在区域内且信号正常,则从t+T1时刻开始记录每个T3时间内采集到的加速度的方差和每段时间的位移,并计算出每一个短暂时刻T1的平均速度记为v,若连续m个T3时间内加速度的方差都小于预设的方差阔值,则以最近n次采集到的加速度值的平均值作为机器人自身的平均加速度a,一旦机器人突然失去信号或超出定位区域,则采用机器人上一时刻的平均速度v,加上最近测出的平均加速度a作为机器人下一阶段保持的运动状态,直到信号恢复或定位导航结束。通过以上策略可以实现机器人在所有待定位导航区域的无盲区平滑定位导航。如图3为机器人定位实现系统结构图。
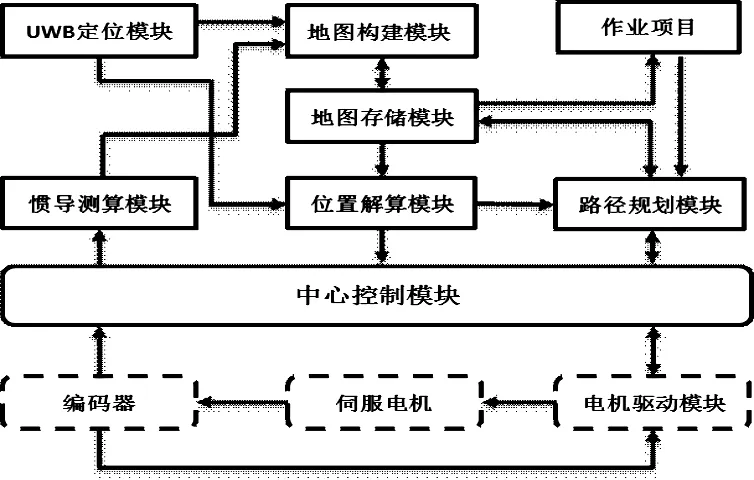
图3 农业智能机器人定位实现系统结构图
4.4 机器人硬件改良
机器人从以前的轮式改为履带式,梯形车身前高后低,采用折叠车身,尺寸为76cm×53cm×30cm,全面展开高度可达2m;两侧为履带驱动,包括光滑履带、多用途履带、冰雪用履带三种;采用柴油大动力发动机,并配有多种前置配套结构,包括挖土、切草、喷药、采摘等不同前置配件,全面满足多种农业耕作的需求。
4.5 灵活多样的客户端
通过WiFi、GPRS、3G或4G等方式将定位数据发送至终端服务器,进行数据解算,得到机器人实时位置信息,再加入到地图当中,使其形象的在多种媒体中显示出来,通过APP软件,使用者可以远距离进行查看和功能操作。
通过上述步骤实现了农业机器人在山区,梯田等环境下自主作业,大幅度提高了山区农业自动化的程度。
5 功能描述
智能农业机器人内设专家指导系统,根据外部多种传感器(温度、湿度等),并通过网络结合实时天气对多种农业作物进行有针对性作业,确保快速、高效的、准确的实时自动化作业,其主要功能如下四点。
5.1 工作区域和路线的快速指定
在地图导入后,在需要工作区域进行指定路线,机器人进入工作区域后,根据指定的路线、带作业的项目以及农作物的种类进行快速自主工作。
5.2 定时、定量作业
机器人可以在人工设定时间的情况下,在规定时间进行针对性农业工作,还可以根据预先设定好的工作量进行定量工作。
5.3 自主充电
机器人背部装有接触式充电装置,在提前将充电位置坐标输入,配合专用充电器,较为方便的在农用拖拉机或者农用充电站上进行自主接触式充电,还可以进行人工遥控对接充电。
5.4 避障机制
在机器人的前面、后背以及下部都采用多种避障机制,下部主要采用红外避障,前面和后背主要采用超声波避障,并结合多种混合算法设定,使其更加容易的探测到石块,大坑等,并及时通过改变方向、线路避免机器人损坏。
6 总结
在农业智能机器人上采用结合惯导的超宽带定位导航系统,改变了以往山区中农业智能设备无法作业的局面,配合三种履带式的传动机制,再使用多种作业辅助配套装置,可以使农业智能机器人在山区、梯田等复杂环境进行多种作业,例如播种、施肥、喷药、采摘等,大幅度提高了复杂农地作业的工作效率,节省了大量人力、物力。实践证明,采用惯导加超宽带定位的新型农业智能机器人在多种复杂环境下进行农业工作科学有效,是一种可以大力推广的新型机器人定位导航方法。
[1] 童凯翔.超宽带在无线定位技术中的应用综述[J].导航定位学报,2015,01(01):10-14.
[2] 杨英杰,王晓峰,杨帆.基于UWB的多径接收算法改进与研究[J].东北电力大学学报,2015,(02):83-88.
猜你喜欢
成都信息工程大学学报(2022年2期)2022-06-14
成都信息工程大学学报(2021年6期)2021-02-12
雷达学报(2018年3期)2018-07-18
雷达学报(2017年1期)2017-05-17
探索科学(2017年4期)2017-05-04
电子制作(2016年11期)2016-11-07
中国交通信息化(2016年8期)2016-06-06
全球定位系统(2015年4期)2015-02-28
全球定位系统(2015年4期)2015-02-28
全球定位系统(2015年4期)2015-02-28