基于CAN总线的农机导航控制系统终端的设计与实现
2016-03-23 03:33刘晓光张亚靖胡静涛刘秀玲
农机化研究 2016年11期
刘晓光,张亚靖,胡静涛,刘秀玲
(1.河北大学 电子信息工程学院,河北 保定 071002;2.中国科学院 沈阳自动化研究所,沈阳 110016)
基于CAN总线的农机导航控制系统终端的设计与实现
刘晓光1,张亚靖1,胡静涛2,刘秀玲1
(1.河北大学 电子信息工程学院,河北 保定071002;2.中国科学院 沈阳自动化研究所,沈阳110016)
摘要:农机导航控制系统终端是实施农机自动导航控制和变量作业的重要装置。为了更方便地管理农机导航系统、促进智能化农业装备的国产化,基于CAN总线技术,针对农机自动导航控制系统设计了一款农机导航控制系统终端。该农机导航控制系统终端在硬件设计方面支持串口和CAN两种通信模式,在软件方面实现了农机自动导航控制所需的路径设置、任务设置、作业视图监控和报警等基本功能。车载试验表明:该农机导航控制系统终端能够有效地实现对农机导航系统的管理和农机状态的监控,同时也大大方便了技术人员对数据的记录和分析等调试工作。
关键词:导航控制系统终端;CAN;视图;路径规划;农机
0引言
农机导航控制系统终端是实施农机自动导航控制和变量作业的重要装置。伴随精准农业的发展,发达国家相继开展了智能化农业装备的研发,相继研发了各种商业化的智能化农业装备产品,如Case HI公司的AFS系列产品、John Deree公司的GreenStar 系列产品及AGCO公司的Field Star系列产品等[1-3]。农机导航控制系统终端是实施精准农业的必备装备之一,无论是精准耕作、精准施肥、精准播种、精准喷药还是精准灌溉,都需要农机导航控制系统终端来实现路径规划、导航任务设定和作业任务设定等,可以说农机导航控制系统终端是精准农业的人机交互中心。
我国关于智能化农业装备进行了大量的研究,并取得了一定的科研成果[4-9]。近年来,先后在北京、黑龙江和新疆等地建立了一定规模的实验区,并引进了一批智能化的农业装备进行相关的试验和应用研究。但整体来看,我国主要依靠引进国外技术和产品进行消化吸收,研发的产品功能较为单一,扩展性较差,不能形成一整套完备的系统。国际标准化组织制订了农林业机械专用的一种串行通信总线标准ISO11783协议[10-13],采用ISO11783协议,能够实现农业机械的农机导航控制系统终端、导航控制器和变量作业控制器等智能装备接口的标准化和国际化,从而实现各种传感器信息及控制信息的标准化传输。因此,开发基于CAN总线农机导航控制系统终端,不仅能够实现各种信息的标准化传输和共享,方便设备的集成组装和维护,而且能够显著地降低智能化农业装备的成本,促进智能化装备在国内的推广应用。
本文基于CAN总线通信协议,设计了一种适合于农机的智能导航控制系统终端,并进行了实际车载试验。
1导航控制系统终端通信协议设计
1.1 ISO11783协议
ISO11783是农林业机械专用的一种串行通信总线标准[13]。ISO11783标准采用控制局域网总线协议CAN 2.0B作为网络协议,制定了农机总线通信的标准协议。ISO11783协议分为应用层、网络层、数据链路层和物理层,如图1所示。

图1 ISO11783模型
ISO11783协议定义的数据链路层报文的格式如图2所示。其中,Pri占用3位代表报文的优先级,R和DP各占用1位,分别为保留位和数据页,PF是PDUFormat的简写占用1个字节,PF用来表示PDU的种类和数据域中部分数据的意义,可以标识PDU的种类及部分地标识其数据域中数据的含义。PS是PDU Specific的简写占用1个字节,用来与PF一起来确定报文种类。SA是源地址占用1个字,用来区分不同的设备。DataField占用8个字节,用来存储所要处理的数据。

图2 ISO11783数据链路层报文
1.2 农机导航控制系统终端通信协议设计
根据ISO11783协议报文PF的取值,PDU分为PDU1和PDU2:当PF≤239时为PDU1;当 PF≥240时为PDU2。农机导航控制系统终端总线协议采用广播方式向总线上收发数据。为了使协议的应用更加简便,定义优先级、保留位及数据页分别为零,PF固定为0xFF。采用SA来区分不同的设备,采用PS来区别不同的信息类型。SA可定义200种多设备,PS的其他6位作为帧信息类型的编码可定义64种不同的消息类型,完全能够满足农机导航控制系统终端的需求。其具体地址分配如表1所示。

表1 地址分配表
2农机导航控制系统终端设计
由于农机田间作业的环境非常复杂,所以农机导航控制系统终端的设计应具备结构紧凑、显示直观及操作简便的特点。本文以ARM9处理器及触摸屏为核心,采用 Windows CE 操作系统基于CAN总线完成了农机导航控制系统终端的硬件系统和软件系统的设计。
2.1 硬件设计
由于农机导航控制系统终端需要完成农机运动轨迹的动态显示及路径规划等对计算要求很高的功能,所以选择具有浮点运算能力的LPC3250 作为农机导航控制系统终端的核心处理器。LPC3250基于32位ARM926EJ-S内核设计,内部带有矢量浮点协处理器(VFP),VFP协处理器在标量模式下能将典型的计算速度提高4~5倍,在优化矢量模式下则提高得更多。农机导航控制系统终端的硬件结构框图,如图3所示。
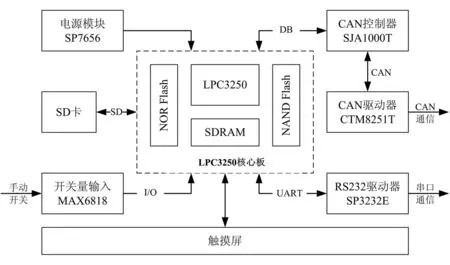
图3 农机导航控制系统终端硬件结构框图
由于选用的LPC3250芯片内部都没有CAN控制器,为了保证农机导航控制系统终端具有CAN通信的功能,利用LPC3250的数据和地址总线及片选信号等扩展实现了CAN通信。采用的CAN通信模块由CAN控制器SJA1000T和CAN驱动器CTM8251T构成。SJA1000T是一款独立的CAN 控制器,具有PeliCAN工作模式,支持具CAN 2.0B协议。CTM8251T是一款带隔离的通用 CAN 驱动器芯片,内部集成了所有必需的CAN隔离和CAN收、发器件,不必添加额外的电路就能够实现带隔离的 CAN收发电路。
另外,考虑到用户操作的简便和快捷,农机导航控制系统终端采用触摸屏的输入输出方式,具有非常友好的人机交互功能。为了方便存储任务信息、导航路径规划信息、变量作业和处方图以及农机作业记录等信息,农机导航控制系统终端中设计了一个SD卡接口。设计完成的农机导航控制系统终端实物如图4所示。
2.2 软件设计
嵌入式领域中主流的图形操作系统有 Linux、VxWorks及Windows CE等。Linux的成本低,但是开发难度较高;VxWorks多用于航空航天等专业性领域,价格昂贵;Windows CE是微软公司推出的嵌入式操作系统,开发方法与Windows 桌面程序相似,容易操作,占用资源少,可以同时执行多个任务。因此,本研究选择Windows CE作为农机导航控制系统终端的操作系统。
农机导航控制系统终端软件主要包括4个功能模块:参数设置模块、任务设置模块、作业显示模块和报警模块,如图5所示。该软件最大的特点是操作简单,层次结构清晰,使用非常方便。

图4 农机导航控制系统终端实物图

图5 农机导航控制系统终端软件结构图
参数设置模块主要完成系统参数设定、控制参数设置和机械参数的设置等功能。任务模块主要完成任务的建立和任务的管理等功能。作业显示模块主要完成显示农机的作业路径和作业状态,包括机器视图和田间视图两种,每种视图都能放大或缩小,并显示车辆当前的位置。其中,机器视图用于跟踪机械的作业状态,车辆在地图上保持不动,而地图移动,车辆行驶方向总是朝向地图上方;农田视图是一个鸟瞰视图,视图中车辆移动,地图保持不动,能够看到田间作业的整体情况。报警模块实现对农机工作状态的监控,并对异常情况进行报警。图6为农机导航控制系统终端管理软件的部分界面。

图6 农机导航控制系统终端管理软件
3车载应用试验
为了验证农机导航控制系统终端的实际性能,将农机导航控制系统终端与插秧机导航控制系统相结合进行了实际车载试验,如图7所示。重点针对农机导航控制系统终端的路径下载、导航控制、控制参数设置及视图监控等性能进行了实际测试。试验表明:该农机导航控制系统终端不仅能够提供比较友好的人机交互界面,而且为后续系统的开发以及功能测试提供了非常便利的条件。

图7 农机导航控制系统终端车载实验
4结论
农机导航控制系统终端是智能化农业装备的关键设备之一,本文重点针对农机导航控制系统的研究,设计了一款人机交互装置,初步实现了的农机导航路径的跟踪、路径下载和任务管理等基本功能。本设计只是农机导航控制系统终端系统开发的一个开端,农机导航控制系统终端系统的开发还有许的问题,如其三维视图的设计及路径规划问题等,都需要进一步的研究。
参考文献:
[1]赵春江.精准农业研究与实践[M].北京:科学出版社, 2009.
[2]Zhang Naiqian, Maohua Wang, Ning Wang. Precision Agriculture-a Worldwide Overview[J].Computers and Electronics in Agriculture, 2002, 36(2-3): 113-132.
[3]段友青,高广智. 精准农业农机装备智能化配置[J].现代化农业,2015(3):60-61.
[4]耿爱军,张晓辉,宋涛,等.精细农业与信息化技术的研究现状与发展趋势.中国农机化,2011(6): 38-41.
[5]宁建,孙宜田,刘青,等.智能化精准农业装备的发展趋势[J].机电产品开发与创新, 2011, 24(2): 77-79.
[6]胡静涛, 高雷, 白晓平,等.农业机械自动导航技术研究进展[J].农业工程学报, 2015(10):1-10.
[7]段向敏,代荣.精确农业背景下我国农业机械发展趋势[J].农机化研究,2013,35(12):229-232.
[8]Liu XG, Hu JT, Hu HC, et al.Design and implementation of visible human-machine interface for trajectory tracking in agriculture vehicle navigation[C]//2012 International Conference on Intelligent System and Applied Material, GSAM 2012.
[9]P Reyns, Missotten B, Ramon H. A Review of Combine Sensors for Precision Farming. Precision Agriculture,2002, 3(2): 169-182.
[10]PC Robert. Precision Agriculture:New Developments and Needs in Remote Sensing and Technologies[J].Ecosystems′ Dynamics, Agricultural Remote Sensing and Modeling, and Site-Specific Agriculture,2003, 51(53): 85-94.
[11]刘传茂,王熙. 基于CAN总线的拖拉机作业数据解析[J].农机化研究,2015,37(10):254-257.
[12]Peets S, Mouazen A M, Blackburn K, et al.Methods and procedures for automatic collection and management of data acquired from on-the-go sensors with application to on-the-go soil sensors[J].Computers & Electronics in Agriculture, 2012, 81(4):104-112.
[13]宋岩, 徐皑冬, 杨为民.农机总线ISO11783网络技术研究[J].拖拉机与农用运输车,2007,34(1): 80-82.
Abstract ID:1003-188X(2016)11-0133-EA
Design and Implementation of Terminal Based on CAN for Agricultural Vehicle Navigation Control System
Liu Xiaoguang1, Zhang Yajing1, Hu Jingtao2, Liu Xiuling1
(1.College of Electronic and Information Engineering,Hebei University, Baoding 071002,China; 2.Shenyang Institute of Automation,Chinese Academy of Sciences,Shenyang 110016,China)
Abstract:Terminal for agricultural vehicle navigation control system is one of the important devices to automatic navigation control of agricultural vehicle.In order to better manage the agricultural vehicle navigation system and promoting intelligent agricultural equipment localization the thesis designed a terminal for agricultural vehicle navigation control system based on CAN bus.In the field of hardware,the terminal supports two kinds of communication mode that serial port and CAN.In the field of software, the terminal realize path settings,task settings, map view, monitoring and alarm for the automatic navigation of agricultural vehicle.Vehicle test show that the terminal not only can effectively achieve the management of the navigation system and state monitoring for agricultural vehicle but also greatly facilitates the data recording and analysis for technical people.
Key words:terminal; CAN; map view; route plan; agricultural vehicle
中图分类号:S24;TP273
文献标识码:A
文章编号:1003-188X(2016)11-0133-04
作者简介:刘晓光(1983-),男,河北保定人,讲师,(E-mail) lxg_hbu@163.com。
基金项目:河北省教育厅项目(QN2015071);保定市科技局项目(15ZG010)
收稿日期:2015-10-15
猜你喜欢
四川农业与农机(2022年4期)2022-08-31
今日农业(2021年4期)2021-11-27
中国化肥信息(2019年5期)2019-06-25
中学生数理化·中考版(2017年6期)2017-11-09
非公有制企业党建(2017年10期)2017-11-03
现代兵器(2017年4期)2017-06-02
现代兵器(2017年4期)2017-06-02
电子技术与软件工程(2016年20期)2016-12-21
科技视界(2016年26期)2016-12-17
电脑知识与技术(2016年26期)2016-11-25