
基于Simplorer/Maxwell的多电飞机机电驱动系统仿真研究
2016-04-09 07:24杨钟鼎周洁敏姜春燕杨东澄
重庆理工大学学报(自然科学) 2016年2期
关键词:无刷直流电机
杨钟鼎,周洁敏,姜春燕,周 迪,杨东澄
(南京航空航天大学 民航学院,南京 211106)
基于Simplorer/Maxwell的多电飞机机电驱动系统仿真研究
杨钟鼎,周洁敏,姜春燕,周迪,杨东澄
(南京航空航天大学 民航学院,南京211106)
摘要:机电作动器(EMA)是将电能转变为机械能,利用电能驱动负载的一类机电驱动器件,在多电飞机中得到广泛应用。根据飞机系统运行特点,以无刷直流电机(BLDCM)为切入点,对机电驱动系统的工作特性及其结构进行分析。采用Maxwell自带的RMxprt模块对无刷直流电机本体建立电磁模型,并生成二维模型进行电磁模拟分析。同时,以Simplorer作为BLDCM驱动电路、控制器、换相器、位置检测部件等的仿真平台,通过Simplorer通信接口实现Maxwell和Simplorer联合仿真,验证了电机控制方案和仿真方法的正确性、合理性。
关键词:多电飞机;机电作动器;无刷直流电机;Simplorer;Maxwell
1背景
传统飞机大多采用液压能、电能、气压能等混合能源,但由于混合能源结构复杂、能源利用率低、可靠性差,使得多电飞机应运而生。多电飞机以电能为主要能源,大范围采用功率电传技术和机电驱动技术。以机电作动器(EMA)为代表的机电驱动技术在多电飞机中运用非常广泛。EMA是将电能转变为机械能,利用电能驱动负载的一类驱动器件,主要用于飞机发动机启动、电环控系统、风扇调控等场合。根据飞机系统的运行特点,要求驱动电机响应快、抗负载和干扰的能力强、实时性好、控制灵活。通过对开关磁阻电机、步进电机、无刷直流电机(BLDCM)的比较,发现开关磁阻电机运转时具有存在噪声、转矩有脉动、步进电机不易控制、难以获得高转速大转矩等缺点。此外,常规的有刷直流电机因噪声大、换相不可靠、效率低而不适合高空环境。最终BLDCM以其低噪声、功率密度大、效率高、控制灵活等优点作为本文多电飞机机电驱动系统的电机模型进行仿真研究。
目前,系统级仿真大多采用Matlab软件进行建模,而Matlab存在着计算效率较低、仿真精度不高等缺点,不适用于飞机机电驱动系统的仿真研究。因此,本文运用Maxwell和Simplorer分别对BLDCM本体和电机驱动控制系统建立模型并联合仿真。其中,Maxwell主要用来对电机、变压器、激励器等进行电磁仿真分析,利用Maxwell自带的RMxprt模块直接输入电机参数建立电机的电磁模型,进而生成电机二维模型。Simplorer是用于多物理领域的仿真分析软件,主要用于电气、电磁等方面的设计和建模仿真,具有强大的系统仿真功能,可以方便地实现电力电子、传感器、电动机、控制系统等模块的联合设计和仿真分析。相比于单一的Matlab仿真,Maxwell和Simplorer协同仿真使得系统仿真结果更加精确、可靠,这也与航空领域对机载电气设备的高精确性要求相契合。
2无刷直流电机系统组成及数学模型
2.1无刷直流电机系统组成
系统主要由BLDCM本体、位置检测部件、电源、逆变电路、换相器、控制电路等组成,系统原理如图1所示。电机控制系统首先利用位置检测部件得到霍尔位置方波信号,经转速计算后形成速度反馈信号,再经过双闭环调节得到PWM信号以实现对电枢电压的调节。

图1 无刷直流电机系统原理
2.2数学模型
BLDCM的数学模型对分析系统特性具有重要指导意义,同时也反映了电机相电压、相电流、每项感应电势之间的函数关系。为了方便分析BLDCM数学模型,作出如下假设:① 由磁场脉动或交变产生的磁芯损耗忽略不计;② 电机铁心为永磁体,忽略温度因素;③ 电枢导体均匀分布;④ 逆变器开关管为理想开关。
图2为BLDCM等效电路。从图中可以看出:电机相电压包括相电阻电压和感应电势。
由此得到相电压方程矩阵形式:
(1)
式中:uA,uB,uC是定子绕组相电压(V);iA,iB,iC是定子每相绕组相电流(A);R是定子每相绕组电阻(Ω);L是每相绕组自感(H);M是每两相绕组之间互感(H);eA,eB,eC是定子每相绕组的感应电势。
电机电磁转矩方程为
(2)
式中:Te是电磁转矩(N·m);Ω是电机机械角速度(rad/s)。
无刷直流电机运动方程为
(3)
式中:TL是负载转矩(N·m);J是转子转动惯量(kg·m2);Bv是黏滞摩擦因数(N·m·s)。

图2 无刷直流电机等效电路
3无刷直流电机系统模型建立及仿真分析
3.1无刷直流电机Maxwell 2D模型
采用Maxwell自带的RMxprt模块,输入电机定子铁芯、定子槽、转子铁芯、磁极等部件的尺寸,建立电机模型,并生成Maxwell 2D模型。同时,设置电机运动部件、边界条件、部件材料、绕组和激励条件等。无刷直流电机基本结构参数如表1所示。为了得到电机的精确电磁分析结果,定义边界调节,设定激励源,对电机部件进行网络剖分。BLDCM本体Maxwell二维模型及其网络剖分如图3所示,可以看出:BLDCM本体模型的建立较为理想,符合系统要求。

表1 无刷直流电机基本结构参数
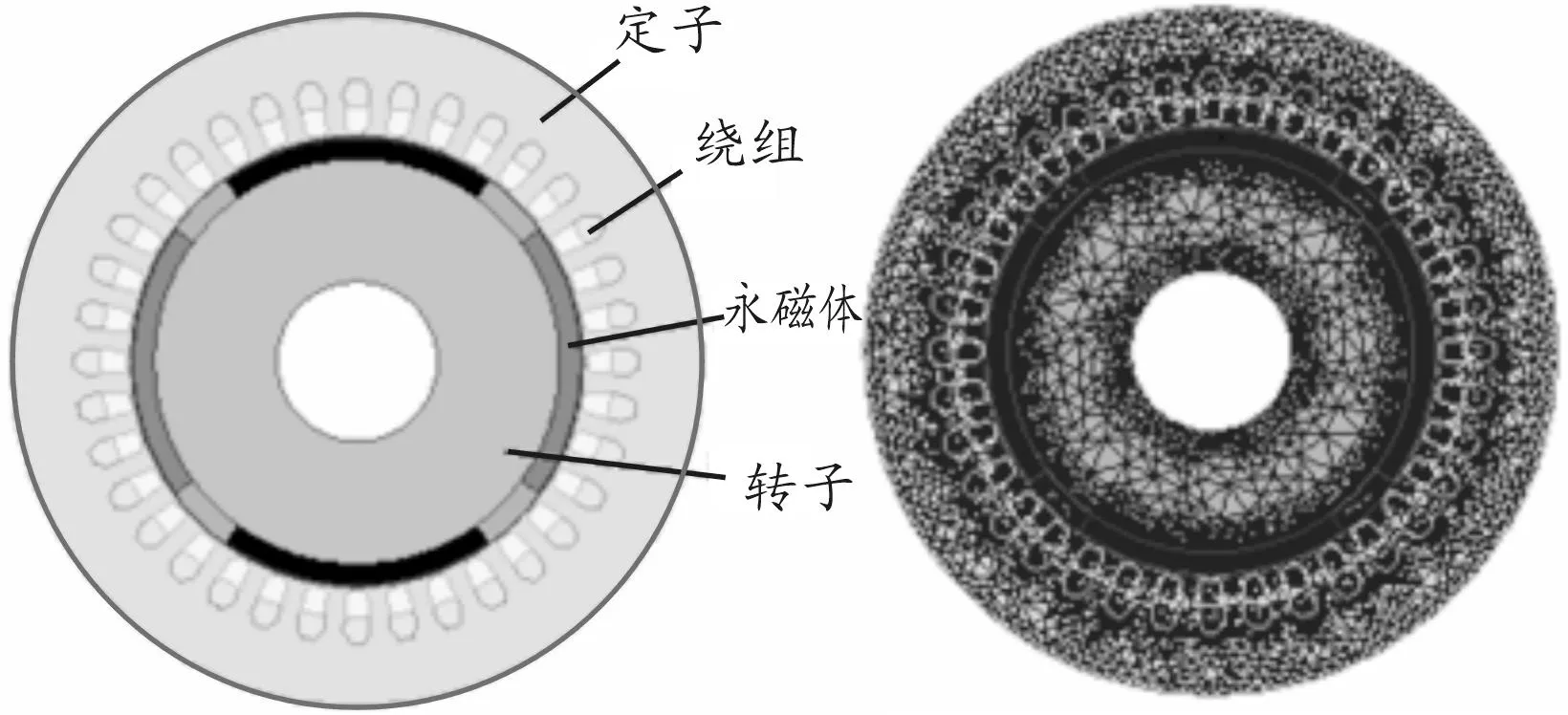
图3 无刷直流电机二维模型(左)
设置求解参数,求解器为瞬态场。设定仿真时间,进行分析自检,对电机进行电磁仿真分析,以查看其磁密和磁力线分布、定子感应电势、绕组磁链等分析结果,便于与实际的电机特性进行比较。空载运行时的定子感应电势如图4所示,可以看出:空载时电机定子感应电势为相位相差120°的梯形波,且存在一定波动。

图4 BLDCM定子感应电势曲线
3.2无刷直流电机系统主电路模型
采用Simplorer自带元件库中的相关元器件构建驱动电路模型,如图5所示,主要包括6个IGBT,6个续流二极管。BLDCM本体模型由Maxwell导入到Simplorer环境中。与Matlab相比,Simplorer 在对IGBT仿真时可以考虑噪声、开关损耗、温度等因素的影响,仿真结果更加精确。
在Simplorer的元件库中IGBT有3种模型,分别为一般模型(average)、基本动态模型(basic dynamic)和高级动态模型(advanced dynamic)。本文选择高级动态模型中的IGBT模型作为BLDCM主电路为三相全桥驱动电路的功率开关管,可充分考虑到飞行环境下噪声、损耗、温度对其的影响。每个开关管IGBT的工作顺序和持续时间由霍尔式位置传感器检测到的磁极与电枢绕组的相对位置信号确定,从而控制电机电枢电流的通断。在BLDCM运行过程中,定子产生旋转式的磁场,将1个电周期360°分为6个节拍,转子每旋转60°电角度为1个节拍,逆变电路中的电流相位发生变化,定子合成磁场状态随之改变。每个节拍代表1种状态,共有6种状态。
3.3控制电路模型
飞机飞行环境多变,受气压、温度、湿度、恶劣天气等因素的影响,因此要求BLDCM的控制电路能够快速反映速度变化、控制灵活、算法简便,故本文采用基于PI调节的电压环和转矩环共同构成双闭环控制系统。相对于顺向作用的开环控制系统,闭环控制的控制精度高,可以根据系统出现的误差信号进行及时的调节。电压环(速度环)和转矩环(电流环)的Simplorer模型如图6所示。电压环即速度环,通过霍尔传感器得到转子磁极和电枢绕组相对位置信号,经过转速计算得到转速反馈电信号speed_back,与参考信号speed_ref形成误差信号。在PI调节模块中设置比例积分调节参数,对误差信号进行调节,作为LIMIT模块的输入信号形成转矩环的参考信号。在电流PI调解中,电流参考信号分别与电机的三相电流信号AM_a,AM_b,AM_c形成误差信号,此误差信号经过脉冲宽度调制(PWM)形成方波信号,经过换相器控制IGBT的通断,从而控制驱动电路将直流电转变为交流电,实现对电机转速的控制。BLDCM 逻辑换相模块如图7所示。
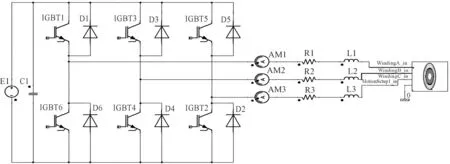
图5 BLDCM驱动电路模型

图6 电压环和转矩环的Simplorer模型
3.4逻辑换相模块
多电飞机对机电驱动系统的可靠性和精确性要求非常高,要求BLDCM能够持续稳定地工作,而这与逆变器的换相准确可靠分不开。逆变器的换相是由在转子上的霍尔传感器检测到的转子磁极与电枢绕组相对位置信号和PWM信号通过换相逻辑电路产生的触发信号控制的。采用Simplorer自带的逻辑与门、逻辑非门等逻辑部件建立换相逻辑门电路,如图7所示。从图中可以看出:以由Simplorer建立的位置检测单元检测到的霍尔位置信号(HA、HB、HC)和电压环、转矩环共同调节得到的PWM方波信号作为输入信号,以通过逻辑变换形成6路电机换相脉冲和速度脉冲作为输出信号,控制开关管的通断。
3.5仿真结果
通过Maxwell和Simplorer将上述各个模块的仿真模型相互连接,实现联合仿真,其系统模型如图8所示。设置无刷直流电机系统主要参数:定子绕组电阻R=1 Ω,额定电压为270 V,额定转速为1 600 r/min,定子绕组电感L=0.02 H,极对数p=2,额定频率为50 Hz,转动惯量J=0.000 8 kg·m2,阻尼系数Bv=0.000 1 N·m·s,PI调节系数Kp=5,Ki=0.01。图9、10分别表示了BLDCM转矩和转速仿真波形。由仿真波形可以清楚地看到:在电机通电启动的瞬间,由于BLDCM定子与转子之间的气息磁场分布呈现梯形状,其启动电流很大,故电机转矩很大,转速迅速增加;大约在25 ms时,电机运行稳定,电磁转矩和转速趋于动态平衡。由此可见,电机的逆变电路、控制器、换相器等的设计基本达到预期的要求,验证了整个系统设计方法和所建立模型的正确性。

图7 BLDCM逻辑换相模块

图8 无刷直流电机系统模型

图9 无刷直流电机转矩
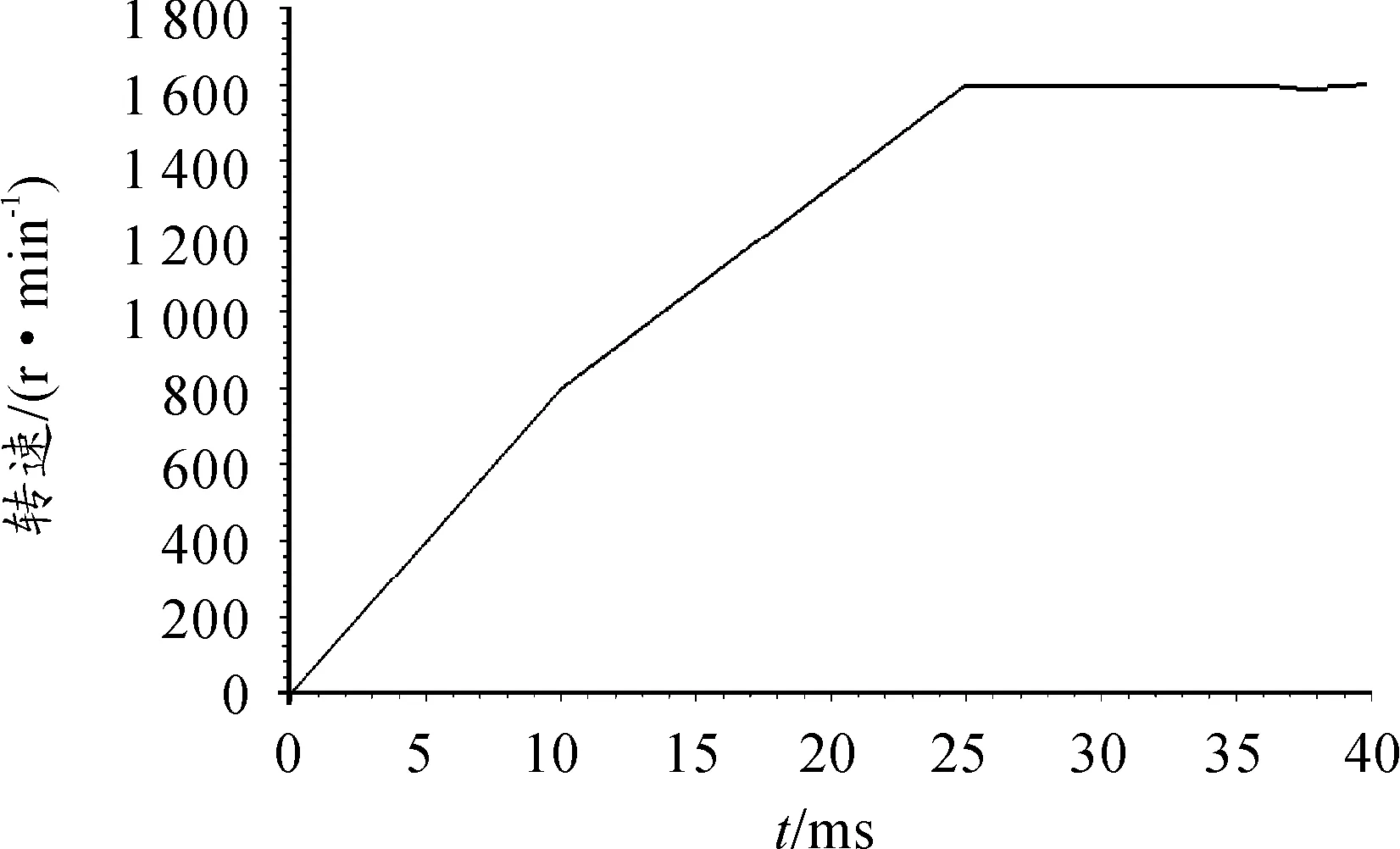
图10 无刷直流电机转速曲线
4 结束语
本文以无刷直流电机(BLDCM)为切入点,对机电驱动系统的工作特性及其组成进行了系统的分析,详细讨论了无刷直流电机系统的结构和BLDCM的数学模型,在Maxwell环境中对BLDCM本体进行二维模型建立和电磁分析。以Simplorer为仿真平台对电机控制器、逆变电路、换向器等进行建模仿真,并实现与Maxwell的联合仿真,最后得出相应的仿真模型和结果,验证了整体设计方案的正确性。与单一地利用Matlab进行系统仿真相比,Maxwell和Simplorer联合仿真的精度有所提高。此外,本文方法为无刷直流电机在多电飞机领域更好、更有效的利用提供了仿真实验基础。
参考文献:
[1]孙雨,周洁敏,王瑶.基于Simplorer/Matlab的多电飞机环控系统研究[J].航空计算技术,2015(3):131-134.
[2]严仰光,秦海鸿,龚春英,等.多电飞机与电力电子[J].南京航空航天大学学报,2014(1):11-18.
[3]李坤芩.基于Simplorer的无刷直流电机仿真分析[J].机电信息,2015(21):136-138.
[4]ALIREZABARZEGA R,SU R,WEN C Y,et al.Intelligent Power Allocation and Load Management of More Electric Aircraft[J].Power Electronics and Drive Systems,2015(9):533-538.
[5]KACHINO S,KISELEVA V,SEROVA B.Research of operation modes of the synchronous electric motor drive system with use of software ANSYS maxwell and simplorer[J].Micro/Nanotechnologies and Electron Devices,2014(7):362-364.
[6]YU J H,BAI B D,CHEN D Z,et al.Design and simulation of the frequency control system based on co-simulation technology[J].IEEE Conferences,2014(6):5875-5880.
[7]SATHYAN,ANAND.Digital PWM control of brush-less DC (BLDC) motor drives[Z].Illinois Institute of Technology,ProQuest Dissertations Publishing,2008:3370892.
[8]PORTILLO,ALBERTO A.Using the particle swarm optimizer to solve for PID values for a BLDC motor[Z].The University of Texas at San Antonio,ProQuest Dissertations Publishing,2008.
[9]周洁敏.飞机电气系统和维护[M].北京:北京航空航天大学出版社,2015:229-236.
[10]MEHRDAD J,MOSTAFA T,ALI S.Simulation of Electrical Motor Drive Using Simulink,Simplorer and Maxwell Software[C]//Iranian Conference on Electrical Engineering.Tehran:[s.n.],2014:808-813.
(责任编辑杨黎丽)
Simulation Research on Electro-Mechanical Drive System of Multi Electric Aircraft Based On Simplorer/Maxwell
YANG Zhong-ding, ZHOU Jie-min, JIANG Chun-yan, ZHOU Di, YANG Dong-chen
(College of Civil Aviation, Nanjing University of Aeronautics and Astronautics, Nanjing 211106,China)
Abstract:Electro-mechanical actuator (EMA) is a kind of electromechanical actuator which can transform the electric energy into mechanical energy, and uses the electric energy to drive the load and is widely used in multi electric aircraft. According to the characteristics of the aircraft system, the paper analyzed the working characteristics and composition of the mechanical and electrical drive system based on the brushless DC motor (BLDCM) as the starting point. The RMxprt module of Maxwell was used to build the model of the brushless DC motor and to generate two-dimensional model for electromagnetic simulation analysis. At the same time, the simulation platform of Simplorer was used as the driving circuit of BLDCM, the controller, the converter, the position detecting unit and so on. At last, the combined simulation of Maxwell and Simplorer was realized by Simplorer communication interface to verify the correctness and rationality of the motor control scheme and simulation method.
Key words:multi electric aircraft; electro-mechanical actuator; BLDCM; Simplorer; Maxwell
文章编号:1674-8425(2016)02-0127-06
中图分类号:TM33;V242
文献标识码:A
doi:10.3969/j.issn.1674-8425(z).2016.02.022
作者简介:杨钟鼎(1989—)男,江苏南京人,硕士,主要从事电子信息处理及控制研究。
基金项目:609国防基础预研基金资助项目(APSC-NJZX-D201303-J03)
收稿日期:2015-10-27
引用格式:杨钟鼎,周洁敏,姜春燕,等.基于Simplorer/Maxwell的多电飞机机电驱动系统仿真研究[J].重庆理工大学学报(自然科学版),2016(2):127-132.
Citation format:YANG Zhong-ding, ZHOU Jie-min, JIANG Chun-yan, et al.Simulation Research on Electro-Mechanical Drive System of Multi Electric Aircraft Based On Simplorer/Maxwell[J].Journal of Chongqing University of Technology(Natural Science),2016(2):127-132.
猜你喜欢
中国高新技术企业(2017年1期)2017-03-24
电子技术与软件工程(2016年16期)2017-03-17
电子技术与软件工程(2016年20期)2016-12-21
数字技术与应用(2016年9期)2016-11-09
电脑知识与技术(2016年17期)2016-07-23
计算技术与自动化(2016年2期)2016-07-20
科技传播(2016年10期)2016-07-15
物联网技术(2015年12期)2015-12-28
现代电子技术(2014年8期)2014-09-27
湖南大学学报·自然科学版(2014年5期)2014-08-08
