
基于特征模型的挠性充液卫星姿态控制*
2016-04-10 08:09张涛
空间控制技术与应用 2016年3期
张涛
(北京控制工程研究所,北京100190)
基于特征模型的挠性充液卫星姿态控制*
张涛
(北京控制工程研究所,北京100190)
采用一种改进的基于特征模型的黄金分割自适应控制方法来解决带有挠性附件和液体晃动的大型卫星远地点机动时的姿态控制问题.根据卫星动力学方程推导特征模型,以动力学特点引入角速度信息构建一种改进的黄金分割自适应控制方法,通过数值仿真加以验证.仿真结果表明,该方法相比传统PID控制,能在不增大控制能量消耗的前提下改善系统控制性能.
挠性附件;液体晃动;远地点机动;姿态控制;特征模型
0 引言
本文主要考虑某大型三轴稳定地球同步轨道卫星在远地点机动时的姿态控制问题[1-3].卫星在远地点机动时,太阳帆板处于打开状态,存在高阶挠性振动;变轨发动机工作,推进剂贮箱内液体燃料减小,系统是时变的;液体推进剂会产生剧烈的晃动等.挠性振动和液体晃动的耦合运动给卫星的高精度稳定姿态控制增加了很大的困难.
针对挠性充液卫星的姿态控制问题,实际工程中最常用的是设计简单,工程易实现的PID方法,但是随着航天科技和控制工程的发展,PID的控制精度越来越不能满足实际需求,亟需寻找新的实用性强、精度高的控制方法.
特征模型理论[4]是吴宏鑫院士经过多年工程实践运用和严格的理论研究提出的新的建模方法,有效解决了控制理论与实际应用脱节的现象,还克服建模难与控制器设计难的问题.特征模型有如下4个特点:在动态过程时,特征模型的输出与实际对象输出在一定误差范围内;在稳态时,特征模型的输出等价于实际对象输出;特征建模时,同时考虑对象特征和控制性能要求,而且模型简单,实用性强;特征模型把高阶信息压缩在特征参量中,降低了模型阶次,利于控制器的设计.
在基于特征模型的自适应控制方法中,黄金分割自适应控制方法,存在姿态推力器“对喷”问题,会耗费大量推进剂,为解决这个问题,本文提出了改进的黄金分割自适应控制方法.首先建立卫星动力学的特征模型[4-6];其次,在特征模型的基础上,探究和设计基于特征模型的控制方案,提出了改进的黄金分割自适应算法;最后,分别采用PID控制和基于特征模型的控制方法进行仿真,用仿真结果说明改进的黄金分割自适应控制方法的有效性.
1 卫星动力学特征建模
根据角动量定律,卫星绕其质心转动的角动量方程[7]为

其中:n为贮箱数目,n=2;IT为卫星的惯性张量;TO为液体晃动模型(本文液体晃动模型采用弹簧-质量系统[3]代替)中固定质量对卫星的力矩;TF为液体晃动模型中晃动质量对卫星的力矩;TSAT为卫星受到的外力矩;ω为卫星角速度;Brot为帆板振动耦合系数矩阵;qp为帆板模态坐标.
为了便于建立挠性充液卫星的特征模型,把液体晃动和帆板挠性引起的力矩看作干扰项,定义,代入式(1)为

由IT矩阵可逆,设u=TSAT+D,得到

设θ为姿态角,当姿态角为小角度时,卫星姿态运动学方程[7]为

式(3)对时间求导,得

将式(2)代入式(4)得
由式(3)知,ω=2R-1(θ),代入式(5)忽略的高阶项得

对式(6)离散化,用欧拉离散化方法[8]得

其中,E(3)为三阶单位阵.
设
则式(7)可以改写为

其中,f1(k),f2(k),g0(k)为特征参数.易知,当 T→0时,f1(k)→2E(3),f2(k)→-E(3),g0(k)→0.
2 基于特征模型的自适应控制方法
(1)二阶特征模型
输出y=θ,u为输入,由式(8)得到卫星的二阶特征模型

(2)参数估计
参数估计[4]采用如下形式:
其中,λ1,λ2根据干扰量大小和收敛速度要求决定,一般情况下,0<λ1<1,0<λ2<4,Z表示正交投影.
(3)控制器设计
本文基于特征模型采用了黄金分割控制、逻辑微分控制和逻辑积分控制.黄金分割自适应控制律[4]为u1(k)=

其中,珓y(k)=y(k)-yr(k),yr[ ] = 0 0 0T,λ为自定义对角阵.
卫星实际工作时,可以通过速度陀螺测量到卫星角速度信号,考虑将角速度信号引入至黄金分割自适应控制,首先将黄金分割自适应控制形式改写式(9)可以写成


则式(10)可以写成仿真发现采用此控制律会导致控制量偏大,引起推力器对喷问题,因此引入降增益系数阵 kp、kd,则改进的黄金分割自适应控制为

为进一步提高控制性能,引入逻辑微分控制[4]为:

其中,kD为逻辑微分系数,c为常数.
为了消除常值干扰的影响,引入普通积分控制

其中,kl是积分系数.
综上所述,总的控制规律为

3 数值仿真和仿真结果
针对典型充液比进行仿真和结果对比,取充液比分别为0.35、0.50、0.65、0.85、0.97;姿态角测量时的随机误差满足标准正态分布;速率陀螺测量角速度时存在 0.05(°)/h的常值漂移和均方差为4×10-6的高斯白噪声,远地点发动机点火的干扰力矩为[3.5 3.5 0.05]N常值力矩.
卫星工作流程:1~60 s,等待姿态;60~180 s,此过程为液体燃料沉底,挠性太阳帆板和低阻尼液体燃料耦合运动;180 s时变轨开始,远地点发动机工作.采样周期取0.064 s,仿真时间选择10 min,初始姿态均为零,稳态时期望姿态为零.采用基于特征模型的自适应控制(CMAC)和PID控制两种方案进行对比.
图1和图2是充液比为0.85时两种方法仿真结果图,可以看出,基于特征模型的自适应控制方法相对于PID控制方法,其动态性能改善不大.

图1 PID方法时姿态角变化曲线Fig.1 Time history of attitude angular using PID

图2 采用特征模型方法时姿态角变化曲线Fig.2 Time history of attitude angular using the adaptive control based on characteristic model
为了更准确对仿真结果进行分析,选取如下性能指标:动态过程中选取60~300 s过程的角度绝对值的平均值作为动态性能指标;稳态时取最后200次仿真数据中角度绝对值的最大值作为稳态误差;控制过程中各次控制量的绝对值的和,作为总控制量,作为控制消耗能量大小的衡量指标,如表1~2所示.

表1 动态性能指标统计数据Tab.1 Statistical data of dynamic performance
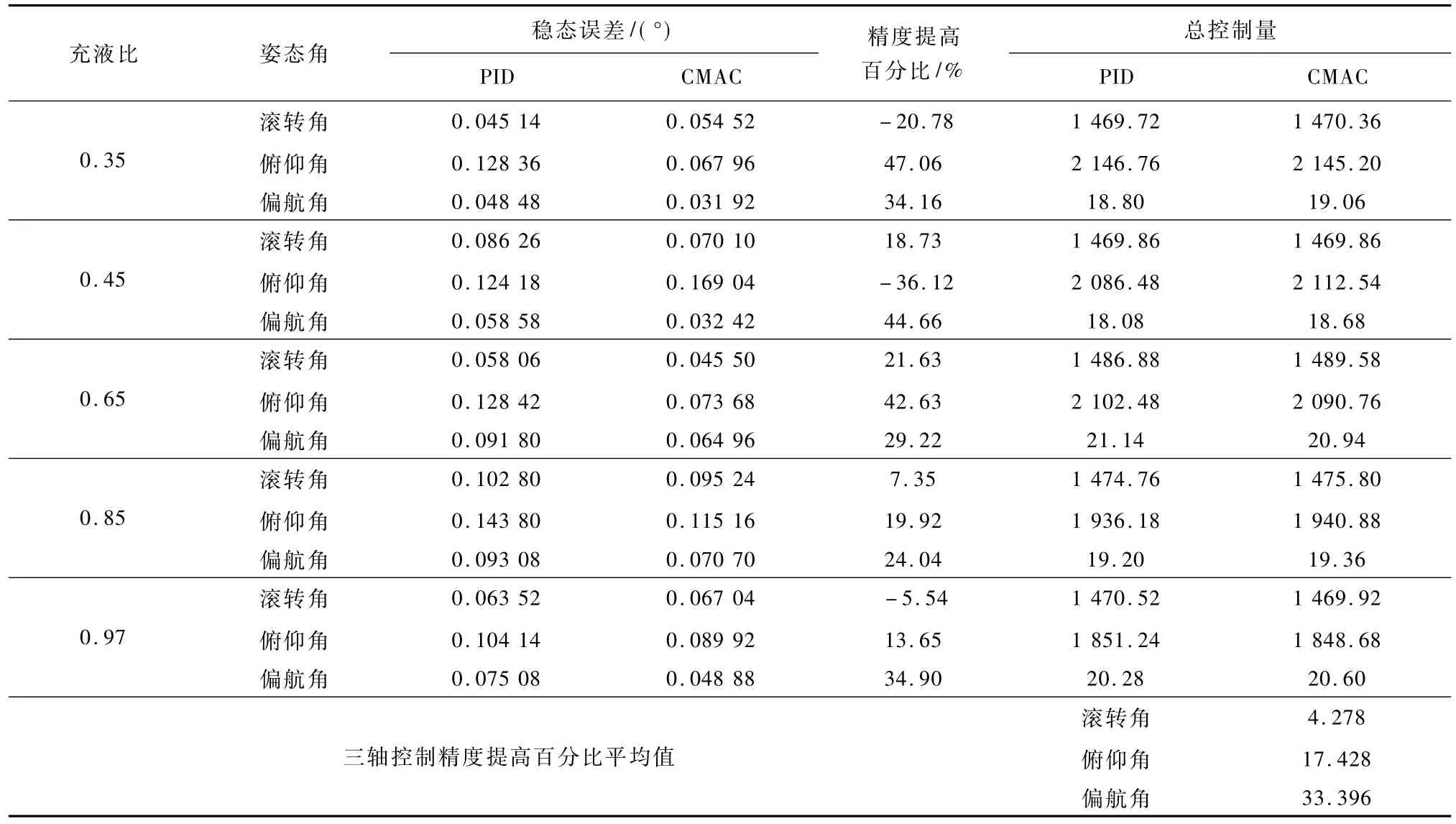
表2 控制精度统计数据Tab.2 Statistical data of control accuracy
根据统计数据,基于特征模型的自适应控制方法比 PID方法在过渡性能上,三轴分别提高了1.396%、8.134%和2.148%,稳态精度分别提高了4.278%、17.428%和 33.396%,总控制量基本相近.
4 结论
本文针对远地点变轨时的姿态控制问题,采用基于特征模型的自适应控制方法,与传统PID控制相比,能够在不消耗更多控制能量的前提下,显著提高稳态精度,并稍微改善了动态性能.特征建模方法通过系统参数辨识得到的特征模型可以适应对象的时变特性,在时变的特征模型的基础上设计的自适应控制律具有更好的综合性能.加入逻辑微分控制,能够在改进的黄金分割自适应控制的基础上改善控制效果.
[1]解永春.航天器鲁棒自适应控制方法及其应用的研究[D].北京:中国空间技术研究院北京控制工程研究所,1994.XIE Y C.Study on robust adaptive control method for spacecrafts and its applications[D].Beijing:Beijing Institute of Control Engineering,Chinese Academy of Space Technology,1994.
[2]罗建三,吕振铎,李宝绶.液体远地点发动机工作期间的姿态控制问题[J].宇航学报,1989,2:19-25.LUO J S,LV Z D,LI B S.Attitude control problem during apogee maneuver[J].Journal of Astronautics, 1989,2:19-25.
[3]屠善澄.卫星姿态动力学与控制[M].北京:宇航出版社,1998,194-243.
[4]吴宏鑫,胡军,解永春.基于特征模型的智能自适应控制[M].北京:中国科学技术出版社,2009.
[5]胡勇,徐李佳.基于特征模型的挠性航天器姿态跟踪控制方法[C]//中国制导、导航与控制会议.北京:自动化学会,2014:8-10.HU Y,XU L J.Characteristic model based control for flexible spacecraft attitude tracking[C]//Chinese Guidance,Navigation and Control Conference.Beijing:Chinese Aossociation of Automation,2014:8-10.
[6]于海祥,雷拥军.基于特征模型的力矩受限卫星三轴姿态控制[J].空间控制技术与应用,2013,39(4): 44-49.YU H X,LEI Y J.Characteristic model based attitude control for satellites subject with input saturation[J].Aerospace Control and Application.2013,39(4):44-49.
[7]章仁为.卫星轨道姿态动力学与控制[M].北京:北京航空航天大学出版社,1998.5.
[8]吴宏鑫.全系数自适应控制理论及其应用[M].北京:国防工业出版社,1990.
The Attitude Control of Flexible Liquid-Filled Satellite Based on Characteristic Model
ZHANG Tao
(Beijing Institute of Control Engineering,Beijing 100190,China)
This paper proposes an improved characteristic model based golden section adaptive control method for the problem of the attitude control of the satellite with flexible appendages and sloshing liquid during apogee maneuver.Firstly,the characteristic model of the satellite is derived from its dynamic equations.Then,the angular velocity measurements are introduced to construct the improved golden section adaptive control scheme.Finally,the method is verified by numerical simulations.The results show that a better control performance can be achieved by this method than the traditional PID method despite the same fuel consumption.
flexible appendages;liquid sloshing;apogee maneuver;attitude control;characteristic model
V448
A
1674-1579(2016)03-0053-05
10.3969/j.issn.1674-1579.2016.03.010
张 涛(1990—),男,硕士研究生,研究方向为控制理论与控制工程.
*国家自然科学基金资助项目(61333008,61304027).
2016-02-21
猜你喜欢
印制电路信息(2022年8期)2022-09-21
舰船科学技术(2022年11期)2022-07-15
钻采工艺(2022年2期)2022-05-18
廊坊师范学院学报(自然科学版)(2021年2期)2021-09-10
科学技术与工程(2021年11期)2021-05-29
汽车文摘(2018年4期)2018-11-27
航天制造技术(2017年5期)2017-11-24
舰船科学技术(2017年1期)2017-02-21
北京航空航天大学学报(2016年9期)2016-11-16
北京航空航天大学学报(2016年3期)2016-02-27
