
带有死区补偿的欠驱动AUV深度控制
2016-05-04 18:40苏玉民张国成
船舶力学 2016年11期
纪 兴,苏玉民,张国成
(哈尔滨工程大学 水下智能机器人国防科技重点实验室,哈尔滨 150001)
带有死区补偿的欠驱动AUV深度控制
纪 兴,苏玉民,张国成
(哈尔滨工程大学 水下智能机器人国防科技重点实验室,哈尔滨 150001)
由于舵桨联合操控的水下机器人舵机传动系统死区非线性的存在,严重影响了某水下机器人的深度控制效果。文章以该水下机器人为研究对象,同时考虑了其欠驱动的运动特性及外界有界干扰和模型参数摄动,设计了具有自适应补偿功能的PID控制器,利用Lyapunov稳定性理论,证明在该控制器作用下,该控制系统是全局稳定的。最后进行了仿真实验。实验结果表明该控制器具有很好的控制效果,是行之有效的。
欠驱动AUV;深度控制;自适应控制;死区补偿
0 引 言
海洋蕴藏着丰富的资源和能源,在海洋利用与开发的过程中,水下机器人起着至关重要的作用[1-4]。某型微小型水下机器人为舵桨联合操控机器人[5],其典型的特征为:执行机构只有一个主推螺旋桨,一对垂直舵和一对水平舵。它通过推进器提供前进所需的推力,通过垂直舵来控制前进的方向,通过水平舵来控制深度和纵倾。在垂直面内,由一个水平舵同时控制深度和纵倾两个自由度,属于欠驱动型水下机器人[6]。这种欠驱动水下机器人的舵机系统的驱动电机与从动部分(舵)不是直接接触的,而是采用了蜗轮蜗杆连接,这就产生了间隙。如果不能消除间隙的影响,间隙就会使负载暂时失控,对驱动单元产生冲击,从而导致稳态误差和时滞,限制了机器人系统的动态性能和稳定精度并产生机械部件的附加磨损。
水下机器人的深度控制精度是其重要的技术指标之一,关系到其是否能够安全有效地完成作业任务[7],很多学者对此做了大量的研究,取得了很多宝贵的研究成果[8-15]。舵桨联合操控水下机器人系统是强非线性系统,其各个自由度相互耦合,加之其欠驱动的特性,使得一般的控制算法难以很好地满足控制系统要求。同时,由于安装间隙的存在,使得在深度控制的过程中操作舵时会存在死区,通常死区的参数是未知的,这也增加了深度控制的复杂性。
本文针对舵机传动系统中存在死区非线性的问题,同时考虑其欠驱动的运动特性及外界有界干扰和模型参数摄动,结合滑模控制的思想,设计了具有自适应补偿功能的PID深度控制器。该控制器显著地降低了死区对系统的影响,提高了系统的响应速度和控制精度,同时也增加了系统的鲁棒性。
1 问题描述
1.1 垂直面运动模型
为便于问题描述,本文根据国际水池会议(ITTC)推荐的和造船与轮机工程学会(SNAME)术语公报的体系,同时参考有关资料,建立了AUV的垂直面的数学模型[4]
式中:ζ为AUV的深度;u0为AUV纵向速度;w为AUV垂向速度;θ为纵倾角(顺时针为正);q为纵倾角速度;m为AUV质量;δ为实际舵角(左舵为正);d1、d2为外界有界慢干扰。
1.2 舵机模型
由于舵机传动系统存在间隙,使得某些时候舵机转动,而舵板并没有跟随转动。考虑到舵机传动系统死区形成原因,其死区模型表示为

式中:δr,δl为衡量舵角死区区间的值。一般有如下假设:
假设1:δr,δl的值为未知的,但是符号已知,即δr≥0≥δl;
假设2:δr,δl的值是有界的,即所以死区又可以表示如下:

式中:

1.3 模型简化
欠驱动AUV在做小攻角下潜时可以认为sinθ≈θ,且其由柯氏力而产生的速度w可以认为很小,且远小于纵向速度u0。由于AUV欠驱动的特性,可以认为,在做定深控制时,其纵向速度始终为一个正的数,即u0>0。结合(1)、(4)和(5)式可以得到欠驱动AUV的垂直面运动模型:

假设3:外界干扰对系统的影响是有限的;
假设4:模型参数的摄动是在一定的范围内的。
由上可知,某微小型水下机器人的深度控制问题就是针对其运动系统(6),克服舵机系统的死区、外界干扰、模型参数摄动及建模误差等不确定影响,设计一种深度控制器,其输出的控制律δ,使深度全局渐进稳定的收敛达到目标值。
2 控制器设计
针对微小型水下机器人存在的舵角死区、外界干扰及模型参数变化等问题,参考滑模控制理论,可以将其深度控制器分成两个部分,分别设计控制策略。一部分通过PID控制器进行控制;另一部分通过补偿控制器进行控制。将相应的控制率分成两个部分,即u=u1+u2。其中u1为PID控制器的输出,u2为补偿控制器输出。
2.1 PID控制器设计

则水下机器人的运动系统可改写为

PID控制器就是对误差信号e进行比例、积分和微分运算,其结果进行加权,得到控制器的输出u1。
PID控制器的数学描述为:

式中:Kp,Ki,Kd为比例放大系数、积分时间常数和微分时间常数。令则(9)式可以写成

控制率u1就是微小型水下机器人的PID深度控制器的控制率,其相关控制参数可以在理想模型下多次仿真实验调节得到。根据(8)式可以建立如下的控制系统,

将(10)式代入(11)式可得

2.2 补偿控制器设计
考虑到微小型水下机器人存在的舵角死区、外界干扰及模型参数变化等问题,参考滑模变结构控制器原理,设计了补偿控制器u2,该控制器用于补偿参数变化带来的影响。

式中:s=z1+c1z2+c2z3。
同时由于水动力参数发生变化,在宽广水域获得的控制器参数已经不能成为其最优的控制参数。假设W*为PID控制器的最优控制参数为PID控制器的最优控制输出为补偿控制器的最优控制输出,则最优总输出为

用估计值代替真实值,可以得到控制器的实际输出

则输出误差为

定义李亚普诺夫函数为:

对上式微分可以得到

则(17)式可以化为
定义


将(19)、(20)、(21)式代入(18)式有
由此可知,该李亚普诺夫函数满足稳定性的条件,所设计的控制器是稳定的。因此该自适应PID控制系统可以表示为

其中PID参数变化率为(19)式所示,补偿控制器的参数变化率为(21)式所示。
3 仿真结果和分析
进行了近水面深度控制仿真实验,分别考虑了参数变化与未考虑参数变化两种情况。AUV的初始状态为静止状态,目标纵向速度为1 m/s,目标深度为1 m。AUV的直径为0.34 m。未考虑参数变化时,PID控制器的控制参数为Kp=2.6,Kd=1.4,Ki=0.0025。考虑受到近水面影响时,相关参数发生了变化,采用了参数自调节控制器,其控制参数的初始值与PID控制器一致。参数调节率相关实验结果如图1-4所示。
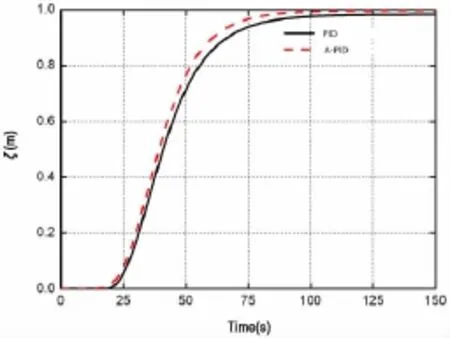
图1 深度响应曲线Fig.1 The depth response curve
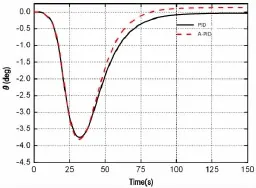
图2 纵倾变化曲线Fig.2 Trim change curve
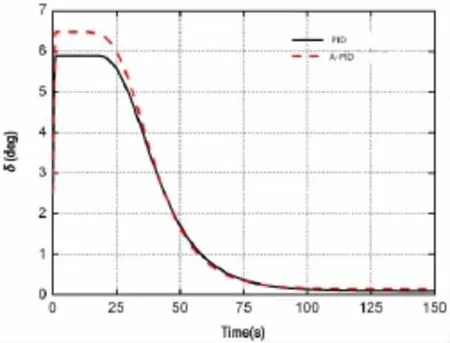
图3 舵角变化曲线Fig.3 Rudder angle curve
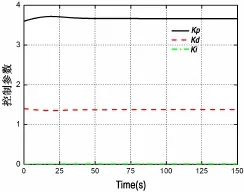
图4 控制参数变化情况Fig.4 The change of control parameters
由图1可知,采用自适应PID(A-PID)控制器时稳态误差为0.003 m,要远远小于采用PID控制器时的0.02 m,且收敛时间也少。由图2所示,其采用A-PID控制器时,稳定航行时的纵倾角为0.132度,是为了部分抵消航行时外部干扰产生的影响。由图3所示舵角的变化曲线差异较大,采用A-PID控制器时其最大舵角为6.47度,而PID控制器时其最大舵角为5.88度,但是最终稳态舵角几乎一致,这是因为考虑到舵机系统存在运动死区,为了获得更好的控制效果,A-PID控制器对其进行了补偿,根据补偿的基本原理可知,在深度变化偏差较大时,补偿量较大,在深度偏差较小时,补偿量较小。同时,在整个控制过程中,考虑到各个外部的干扰和内部的不确定性,A-PID控制器的控制参数变化如图4所示,其中Kp从初始状态的2.6先增大到3.718后减小至稳定状态3.664;Kd一直处于减小状态,从初始状态的1.4减小至1.374稳定;Ki几乎没有变化。
由上分析可知,采用带有补偿功能的自适应PID(A-PID)控制器能够有效地抑制舵角死区、外界干扰及模型参数变化等问题对控制效果的影响,获得了较好的控制效果。
4 结 论
水下机器人的深度控制精度是其重要的技术指标之一,关系到其是否能够安全有效地完成作业任务。针对舵机传动系统中存在死区非线性的问题,同时考虑其欠驱动的运动特性及外界有界干扰和模型参数摄动,结合滑模控制的思想,设计了具有自适应补偿功能的PID深度控制器。通过仿真实验证明该控制器显著地提高了系统的响应速度和控制精度,同时也保证了系统的鲁棒性。
[1]蒋新松,封锡盛,王棣棠.水下机器人[M].沈阳:辽宁科学技术出版社,2000:30-31.
[2]徐玉如,庞永杰,甘 永等.智能水下机器人技术展望[J].智能系统学报,2006,1(1):9-16. Xu Yuru,Pang Yongjie,Gan Yong,et al.AUV—state of the art and prospect[J].CAAI Transactions on Intelligent Systems,2006,1(1):9-16.
[3]封锡盛,李一平,徐红丽.下一代海洋机器人—写在人类创造下潜深度世界记录10912米50周年之际[J].机器人, 2011,33(1):113-118. Feng Xisheng,Li Yiping,Xu Hongli.The next generation of unmanned marine vehicles dedicated to the 50 anniversary of the human world record diving 10 912 m[J].Robot,2011,33(1):113-118.
[4]朱心科,金翔龙,陶春辉等.海洋探测技术与装备发展探讨[J].机器人,2013,35(3):376-384. Zhu Xinke,Jin Xianglong,Tao Chunhui,et al.Discussion on development of ocean exploration technologies and equipments[J].Robot,2013,35(3):376-384.
[5]王 波.微小型水下机器人运动仿真研究[D].黑龙江:哈尔滨工程大学,2008. Wang Bo.Research on motion simulation of a small underwater vehicle[D].Harbin:Harbin Engineering University,2008.
[6]Kim Y S,Lee J,Park S K,et al.Path tracking control for underactuated AUVs based on resolved motion acceleration control[C]//Proc.the Fourth International Conference on Autonomous Robots and Agents.Wellington,2009:511-515.
[7]Tehrani N H,Heidari M,Zakeri Y,et al.Development,depth control and stability analysis of an underwater remotely operated vehicle(ROV)[C]//The 8th IEEE IntConf on Control and Automation.Xiamen:IEEE,2010:814-819.
[8]Soylu S,Buckham B J,Podhorodeski R P.A chattering-free sliding-mode controller for underwater vehicles with faulttolerant infinity-norm thrust allocation[J].Ocean Engineering,2008,35(16):1647-1659.
[9]朱康武,顾临怡,马新军等.水下运载器多变量鲁棒输出反馈控制方法[J].浙江大学学报:工学版,2012,46(8): 1397-1406. Zhu Kangwu,Gu Linyi,Ma Xinjun,et al.Studies on multivariable robust output feedback control for underwater vehicle [J].Journal of Zhejiang University(Engineering Science),2012,46(8):1397-1406.
[10]Sharma R,Rana K P S,Kumar V.Performance analysis of fractional order fuzzy PID controllers applied to a robotic manipulator[J].Expert Systems with Applications,2014,41(9):4274-4289.
[11]Duan Xiaogang,Li Hanxiong,Deng Hua.Robustness of fuzzy PID controller due to its inherent saturation[J].J of Process Control,2012,22(2):470-476.
[12]Hu Bo,Tian Hai,Qian Jiani.A fuzzy-PID method to improve the depth control of AUV[C].IEEE International Conference on Mechatronics and Automation,2013:1528-1533.
[13]Batista,Silvestre C,Oliveira P.A sensor-based controller for homing of underactuated AUVs[J].IEEE Transactions on Robotics,2009,25(3):701-716.
[14]Li J H,Lee P M.Asymptotic diving control method for torpedo-type underactuated AUVs[C]//Ocean 2008.Quebec, Canada,2008:1-5.
[15]Liang Xiao,Guo Bingjie,Wan Lei.Motion control of mini underwater robots based on sigmoid fuzzy neural network[C]// IEEE International Conference of Automation and Logistics,Augest 2007.Shangdong,China,2007:918-922.
Study on the depth control of underactuated AUV with dead-zone compensation
JI Xing,SU Yu-min,ZHANG Guo-cheng
(State Key Laboratory of Autonomous Underwater Vehicle,Harbin Engineering University,Harbin 150001,China)
In the underactuated AUV Controlled by thrusters and fins,the dead-zone nonlinearity of steering engine transmission system can direct influence the depth control performance.In this paper,under-actuated motion characteristic external bounded disturbance and model parameter perturbation are considered.A PID with self-adaptive compensation function is proposed.With the help of Lyapunov function,the control system is proved to be globally stable.The simulation results show effectiveness of this method.
underactuated AUV;depth control;adaptive control;Dead-Zone Compensation
U674.941
A
10.3969/j.issn.1007-7294.2016.07.008
1007-7294(2016)11-1420-07
2016-07-28
国家自然科学基金(51579053)
纪 兴(1984-),男,博士研究生,E-mail:869400673@qq.com;苏玉民(1960-),男,教授,博士生导师。
猜你喜欢
江苏船舶(2021年4期)2021-09-28
舰船科学技术(2021年8期)2021-09-18
力学学报(2020年4期)2020-08-11
舰船电子工程(2020年4期)2020-06-19
自动化学报(2019年6期)2019-07-23
电子制作(2018年1期)2018-04-04
科学与财富(2017年15期)2017-06-03
黑龙江电力(2017年1期)2017-05-17
科技创新与应用(2017年1期)2017-05-11
制造业自动化(2017年2期)2017-03-20
