
风电机组转矩的非线性控制
2016-05-25 00:37王晓东李怀卿刘颖明谢洪放
电工电能新技术 2016年1期
王晓东, 李怀卿, 刘颖明, 谢洪放
(沈阳工业大学电气工程学院, 辽宁 沈阳 110023)
风电机组转矩的非线性控制
王晓东, 李怀卿, 刘颖明, 谢洪放
(沈阳工业大学电气工程学院, 辽宁 沈阳 110023)
风电机组发电机转矩控制不仅直接决定机组的最大功率追踪效果,而且对传动系统疲劳载荷有明显影响。风电机组发电过程时刻受到风速的扰动,而且机组传动系统具有明显的非线性特性。本文设计了一种非线性转矩控制器,在计算出最优转速后,对风电机组转矩进行控制跟踪最优转速。在考虑机组传动系统柔性的情况下,实现最大功率追踪的同时可减小传动系统疲劳载荷。在FAST软件中针对5MW风电机组仿真,结果表明该方法能够很好地追踪最大功率,且相对传统PI控制输出的功率更加稳定平滑,对传动系统载荷有一定的改善。
风力发电; 非线性控制; 转矩控制
1 引言
随着风力发电技术的迅速发展,风电机组的单机容量不断增加,对控制技术也提出了更高的要求。风电机组的控制系统在实现最大风能追踪、平稳发电运行的基础上,还需尽可能抑制输出功率波动,优化机组承受的载荷,这样就对风电机组的控制系统提出了更高的要求[1-3]。
最大功率追踪(MPPT)是变速变桨风电机组控制的主要任务之一,常用的MPPT方法有叶尖速比控制、功率反馈和爬山法[4]。文献[5]将叶尖速比控制算法与功率反馈法相结合,采用一种简单有效的方法获取定子给定最佳功率与转速关系曲线,避免了复杂的运算;文献[6]对传统的登山搜索控制算法进行改进,将原算法中的计算参数由风力机输出的机械功率转化为发电机输出的电磁功率,并与基于定子磁链定向的矢量控制相结合。在传动系统的载荷控制方面,传统的方法是在PI控制的基础上,利用带通滤波器产生的阻尼转矩与原发电机转矩参考值相加,增加系统阻尼,进而抑制传动系统的扭振,减小载荷[7];但是当模型存在不确定性时,系统的稳定性和其他性能会受到影响[8]。而以上所有的方法都是基于传动系统的线性化模型,其模型的建立忽略了传动系统的非线形,难以真实地反映风电机组传动系统的动态响应,存在一定的局限性。
本文针对双馈风电机组的最大功率问题和传动系统载荷问题,在额定风速以下,利用非线性控制(NC),通过及时跟踪最优转矩,从而减小功率波动,提高输出电能质量,相对减小传动系统扭转载荷。
2 风速对转矩控制的影响
风电机组的发电过程是一个复杂的非线性过程,受到风速和发电机转矩控制的直接影响,其过程如图1所示。其中,v为风速;Ta为风轮气动转矩;ωr为风轮角速度;ωg为发电机角速度;Te为发电机转矩;Pe为发电机输出功率。风速变化具有强烈的随机性、时变性和不确定性的特点,传动系统的非线性特征主要体现在参数不确定性和无法准确建模的动态部分。

图1 风机传动系统之间关系Fig.1 Relationship among drive train in wind turbine
风电机组功率和风速之间的关系可以通过式(1)和式(2)表示:
(1)
(2)
式中,Pa为风轮从风中获得的功率;ρ为空气密度;R为风轮半径;Cp为风能利用系数;λ为叶尖速比;β为桨距角。
通过式(1)和式(2)可以得出风轮转矩,然后通过传动系统的模型就可以得到最终的控制量Tg,所以在整个过程中最开始的风速是十分重要的。
如果通过历史的Tg和ωg数据对Ta和ωr预测,进而对风速预测,然后根据图1所示的关系对发电机转矩进行控制,这样对最大功率追踪和载荷控制问题是十分有意义的。
3 风电机组传动系统建模
双馈风电机组的传动系统由风轮、低速轴、齿轮箱、柔性联轴器和发电机转子等构成。
本文研究的风电机组传动系统考虑传动系统的柔性、综合刚度和阻尼等情况,采用两质量块模型,具体模型如图2所示。

图2 传动系统的两质量块模型Fig.2 Two-mass model of drive train
根据图2得出式(3)~式(6):
(3)
(4)
(5)
(6)
式中,θr、θls和θg分别为风轮角位移、低速轴角位移和发电机角位移;ωls为风轮低速轴角速度;Jr、Jg分别为风轮转动惯量和发电机的转动惯量;Tls、Ths和Te分别为风轮低速轴转矩、高速轴转矩和发电机转矩;Kls为低速轴的扭转刚度;Bls为低速轴的阻尼;n为齿轮传动比。
发电机转矩非线性控制框图如图3所示。通过图3得知各个变量之间的关系,建立如下方程:
(7)
式中
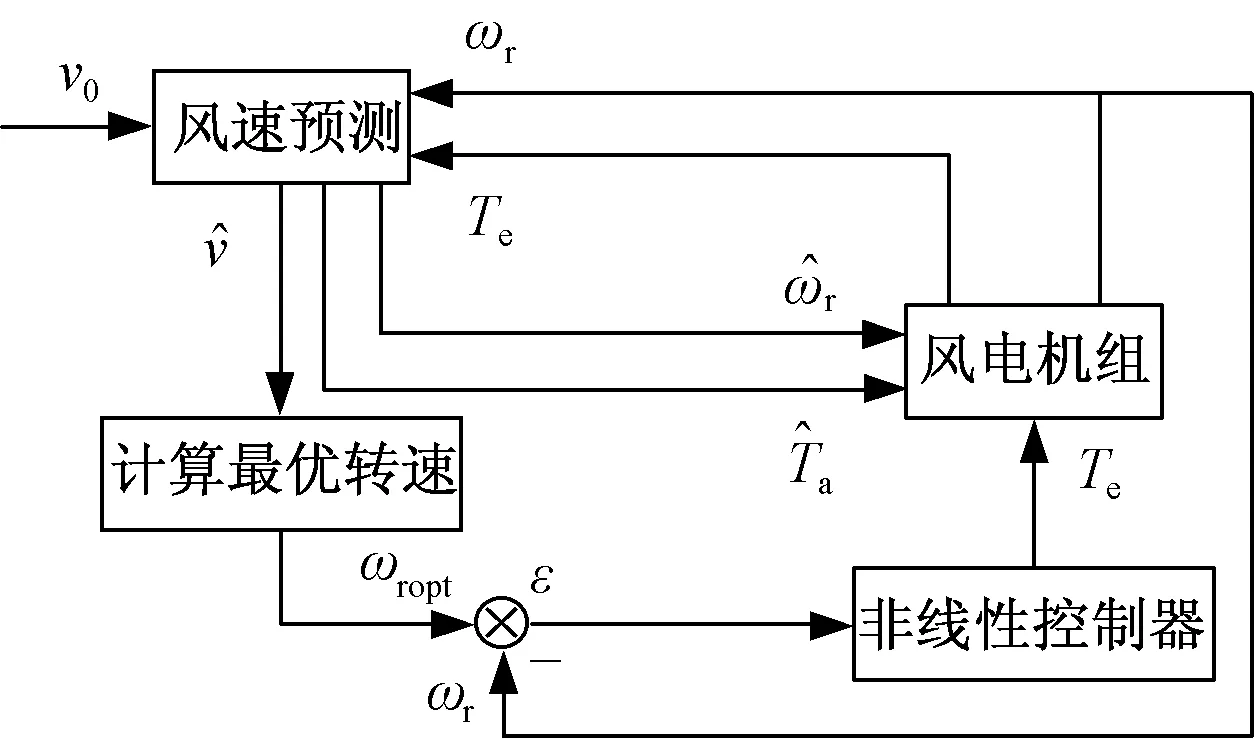
图3 发电机转矩非线性控制框图Fig.3 Control schema of nonlinear generator torque control
4 基于卡尔曼滤波的风速的预测
风速是决定最优风轮转速ωropt的重要变量之一。由于受到风轮的影响,风电机组中风速测量精度有限且存在明显滞后,本文控制中采用在线动态预测的方法作为参考。通过卡尔曼滤波和牛顿迭代法来预测风速,卡尔曼滤波器的输入为发电机转矩和风轮转速,预测输出状态量为风轮转矩和风轮转速。
本文取轮毂中心处的风速为参考风速,假设地面为零风速平面,离地高度H处的风速VH为:
(8)
式中,V0为离地高度H0处的风速;n为风剪切指数。风力发电机转轴r处长度为dr的叶片微元离地高度为Hr,其与叶片方位角θBi之间的关系为:
(9)
本文中θBi为0°。
卡尔曼滤波器经常被用作估计风电机组的风轮转矩,具体估计过程见文献[8],估计方程为:
(10)
式中,ξ和ζ为过程噪声和测量噪声,它们都是零均值的高斯噪声。
通过卡尔曼滤波器估计出气动转矩后,重复以下具体的迭代过程:
(11)
(12)
(13)
(14)
n=n+1
(15)

(16)
5 基于风速预测的发电机转矩的非线性控制
本文研究的区域在低风速区域,不考虑对桨距角度和偏航角进行控制,实际操作上将桨距角和偏航角设置在最优的0°位置,具体的控制框图如图3所示。
在式(16)中已经介绍了ωropt计算,这里不再赘述。下面主要进行控制量Te导数的求解。
根据式(17),可以得到风轮转速的二阶导数方程式(18):
(17)
(18)
从式(5)可以推出低速轴转矩的导数:
(19)
将式(17)和式(19)代入式(18):
(20)
现定义风速跟踪误差εr为:
(21)
得到跟踪误差的二次导数:
(22)
式中,a0、a1符合赫尔维茨稳定条件。
将状态量换成相应的估计量便得到了控制量Te:
(23)
为了防止常数在控制中的干扰作用,现求取如下三阶导数:
(24)
同样,a0、a1、a2符合赫尔维茨稳定条件。
根据式(20)求取风轮转速的三阶导数:
(25)
根据式(25)得到控制量发电机转矩的导数:
(26)
6 案例仿真计算与结果分析
在风电场进行风电机组控制策略试验风险较大,成本很高,而且无法实现在相同工况下两种方法对比,因此本文采用风电机组载荷计算软件进行案例仿真计算验证控制策略的性能。利用美国可再生能源实验室开发的FAST仿真软件对一5MW双馈风电机组进行仿真,机组的部分参数如表1所示。

表1 机组的部分参数
仿真采用平均风速为6m/s的湍流风作为风速输入,如图4所示。

图4 风速模型Fig.4 Wind speed model
不同控制策略下风轮转速和最优风轮转速的转速差如图5所示。其中NC表示非线性控制器,PI表示传统PI控制器。不难看出,在非线性控制器作用下,最优风轮转速的追踪要好于传统的PI控制。

图5 不同控制策略下风轮转速与最优风轮转速的转速差Fig.5 Speed difference between rotor speed and optimal rotor speed using different control strategies
非线性控制器和传统PI控制器控制下的发电机转矩如图6所示。可以看出,非线性控制器控制下的发电机转矩波动较小。发电机转矩数据统计结果如表2所示。可以看出,两种控制策略的最大值、最小值和平均值相差不大,但是非线性控制器的标准差却只有PI控制器的80.6%,说明发电机的转矩波动减弱。
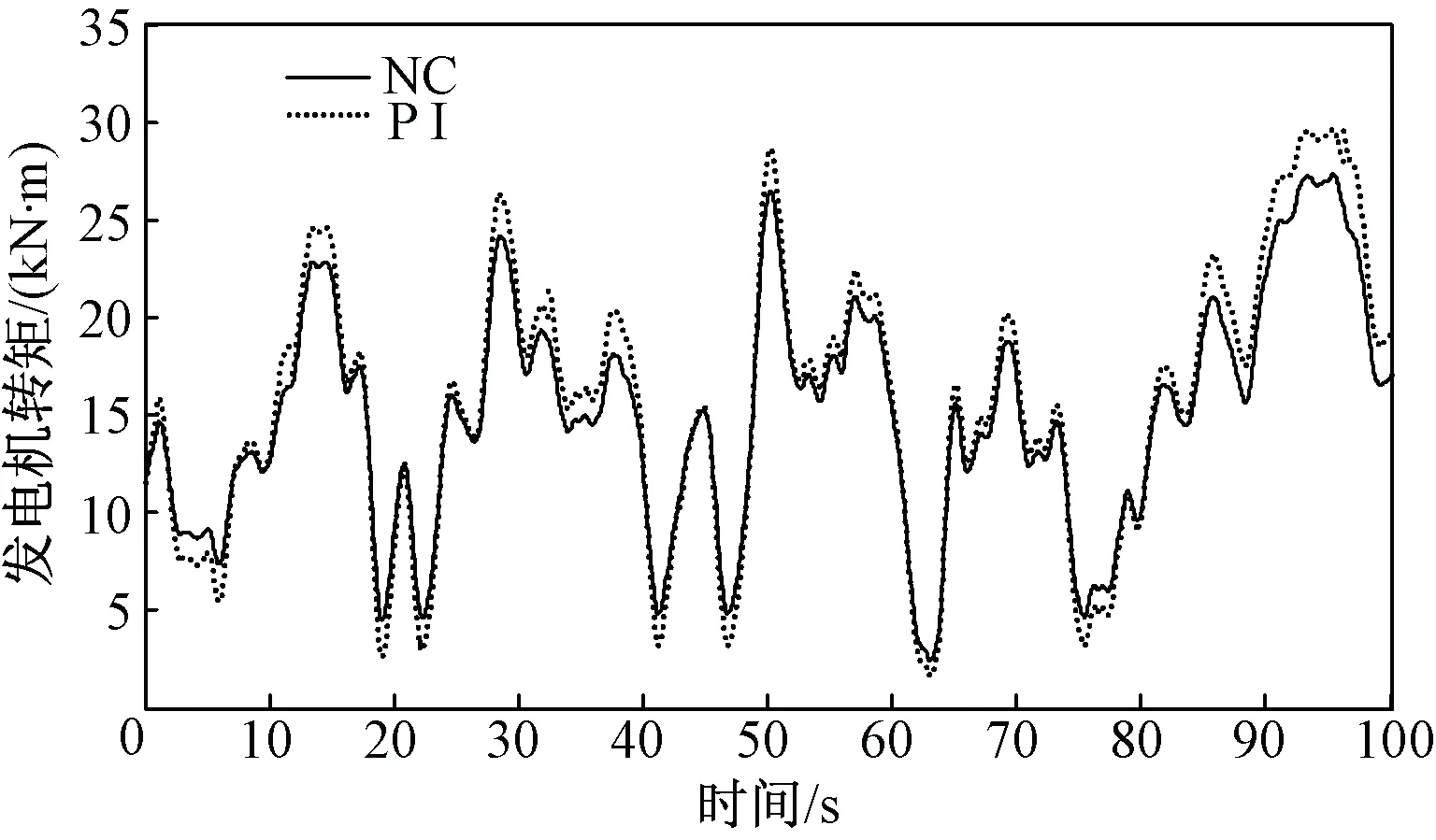
图6 不同控制策略下的发电机转矩Fig.6 Generator torque using different control strategies

表2 发电机转矩数据统计结果 (单位:N·m)
两种控制策略下发电机的输出功率如图7所示。可以看出,在本文控制器作用下,功率的波动相对平稳。发电机功率数据统计结果如表3所示。可以看出,在本文控制器的作用下,输出功率波动幅度减小,标准差只有PI控制器的74.7%。

图7 不同控制策略下发电机输出功率Fig.7 Generator power using different control strategies

表3 发电机功率数据统计结果 (单位:W)
7 结论
针对风速变化的随机性、不确定性及其对风电机组转矩控制和输出功率的直接影响,本文设计了一种基于卡尔曼滤波和牛顿迭代的风速预测方法,并以此为基础,考虑风电机组传动系统的非线性,提出了一种发电机转矩非线性控制器,该控制器可以更好地跟踪最优转速。5MW风电机组在FAST环境的计算结果表明,该控制策略能够使输出功率更加稳定平滑,提高输出功率品质,并且在一定程度上减小了传动系统的疲劳载荷。
[1] 姚兴佳,王晓东,单光坤,等 (Yao Xingjia,Wang Xiaodong,Shan Guangkun,et al.). 双馈风电机组传动系统扭振抑制自抗扰控制 (Torque vibration active disturbance rejection control of double fed wind turbine drive train) [J]. 电工技术学报 (Transactions of China Electrotechnical Society),2012,27(1): 136-141.
[2] Tony Burton, David Sharpe, Nick Jenkins, et al. Wind energy handbook [M]. New York: John Wiley & Sons Ltd, 2001. 200-232.
[3] 罗宇锋,刘勇,陈建磊 (Luo Yufeng, Liu Yong, Chen Jianlei). 模糊控制的爬山法在风电系统中的应用研究 (Climbing method of fuzzy control in the wind power system) [J]. 控制工程 (Control Engineering of China),2014,21(3): 378-381.
[4] 赵梅花,范敏,陈军,等 (Zhao Meihua, Fan Min, Chen Jun, et al.). 双馈风力发电系统MPPT控制 (Maximum power point tracking control for double-fed induction generation system) [J]. 电气传动 (Electric Drive),2014, 44(3): 32-35.
[5] 付晓明 (Fu Xiaoming). 变速恒频风力发电系统最大风能追踪的控制 (Maximal wind-energy tracking control of variable constant-frequency wind-power generation system) [J]. 电力系统及其自动化学报 (Proceedings of the CUS-EPSA), 2013, 25(1): 74-78.
[6] E A Bossanyi. Wind turbine control for load reduction [J]. Wind Energy, 2003, 6(3): 229-244.
[7] L John, E U Carlos, B E Janaka, et al. Damping of torsional vibrations in a variable-speed wind turbine [J]. IEEE Transactions on Energy Conversion, 2013, 28(1): 172-180.
[8] 崔双喜,王维庆,周顺平 (Cui Shuangxi, Wang Weiqing, Zhou Shunping). 基于估计的风力机最大功率跟踪控制 (Maximum wind power tracking based on estimation) [J]. 计算机测量与控制 (Computer Measure & Control), 2014, 22(5): 1410-1412.
Nonlinear torque control based on prediction of wind speed in wind turbine
WANG Xiao-dong, LI Huai-qing, LIU Ying-ming, XIE Hong-fang
(Department of Electric Engineering, Shenyang University of Technology, Shenyang 110023, China)
Torque control in the wind turbine determines directly the effect of the maximum power point tracking, and it has a significant effect on fatigue load in the drive train. In this paper, a nonlinear torque controller is designed to control torque because of wind disturbance and obvious nonlinearity in the drive train. By considering the flexibility of drive train case, the maximum power point tracking and reducing of load are realized. In FAST software, it is simulated for a 5MW wind turbine, and the results illustrate that the effect of the maximum power point tracking and reducing of load is better when using nonlinear controller than the effect of using PI.
wind power; nonlinear control; torque control
2015-06-23
国家自然科学基金 (51207095)、 辽宁省高等学校优秀人才支持计划、 辽宁省科技创新重大专项(201303005)资助项目
王晓东(1978-), 男, 河南籍, 副教授, 博士, 主要从事风力发电技术方面的研究工作; 李怀卿(1990-), 男, 山东籍, 硕士研究生, 主要从事风力发电机组控制的研究。
TK83
A
1003-3076(2016)01-0019-05
猜你喜欢
中国造纸(2022年8期)2022-11-24
电机与控制学报(2022年6期)2022-07-15
防爆电机(2022年2期)2022-04-26
青少年科技博览(中学版)(2022年1期)2022-03-28
一重技术(2021年5期)2022-01-18
太阳能(2019年10期)2019-10-29
中医眼耳鼻喉杂志(2019年2期)2019-04-13
太阳能(2019年1期)2019-02-14
电子制作(2018年10期)2018-08-04
风能(2016年9期)2016-12-21
