
基于改进型电压外环弱磁控制的IPMSM控制器
2016-05-25 00:37陈果
微特电机 2016年5期
陈 果
(中山职业技术学院,中山 528040)
基于改进型电压外环弱磁控制的IPMSM控制器
陈 果
(中山职业技术学院,中山 528040)
以内置式永磁同步电机(Interior Permanent Magnet Synchronous Motor, IPMSM)为应用对象,研究并实现了电压外环弱磁控制策略。该控制策略是在矢量控制系统中增加一个电压外环,该外环的参考值为电压利用率上限,反馈量为实际电压利用率,输出量为弱磁电流id的参考值。研制了一台30 kW的控制器,给出了详细的硬件设计和软件设计过程。通过整车试验发现了算法中存在的高速弱磁失控问题。应用运动轨迹分析发现弱磁失控的原因在于电流环的限幅环节。提出了基于差异限幅的改进型电压外环弱磁控制策略,并在整车试验中验证了其可行性。
内置式永磁同步电动机;控制器;弱磁;电压外环;弱磁失控;差异限幅
0 引 言
由于内置式永磁同步电动机(以下简称IPMSM)具有宽调速范围、大转矩电流比、高功率密度、高效率、高功率因数和低噪声等优点[1-2],近年来,在电动汽车中得到越来越多的应用。尤其是对功率密度和效率有着严格要求的电动乘用车领域,更是获得了主要应用[3]。
汽车电机控制器的功能设置应充分考虑整车的运行要求,除起停控制、矢量控制、转矩控制等基本控制功能外,还加入了提高运行效率的最大转矩电流比控制[4-6],满足宽范围调速的弱磁控制[4,7-9],及对电池电压变化的自适应算法[10]等,以适应汽车电机及其控制器系统调速范围宽、过载功率和过载转矩大、动力电池组电压变化范围宽等对控制器的特殊要求。
本文研究并实现了电压外环弱磁控制策略,该算法在传统的矢量控制算法增加了一个基于电压利用率的电压外环,该电压外环的输出量直接作为弱磁电流给定,实现宽范围弱磁运行,并且具有良好的动态响应,满足电动汽车运行要求。本文设计了一台30 kW的控制器,并将控制器及电机安装到整车进行试验。通过试验发现,算法存在高速弱磁失控问题。对此,本文提出了一种基于差异限幅的改进型电压外环弱磁控制策略,并在整车试验中验证了该策略的可行性。
1 电压外环弱磁控制
1.1 原理分析
IPMSM的转子磁链矢量和转子位置方向相同,因此其矢量控制系统采用dq坐标系,并作如下假设:定子绕组的连接方式为Y型连接;定子磁场近似正弦分布,忽略谐波及磁饱和;忽略磁滞和涡流损耗;忽略转子的阻尼电阻。基于上述假设,基于dq坐标系的IPMSM的电压、磁链和电磁转矩方程分别:
(1)
(2)
(3)
(4)
(5)
式(1)~式(5)中:ω为转子电角速度;Ld,Lq分别为d,q轴电感;Ψf为永磁体磁链;Ψd,Ψq分别为d,q轴磁链;p为电机极对数;ud,uq分别为d,q轴定子电压;id,iq分别为d,q轴定子电流;p为微分算子。
电压外环弱磁控制系统的原理框图如图1所示,系统由三相逆变器、旋变解码器、坐标变换、id电
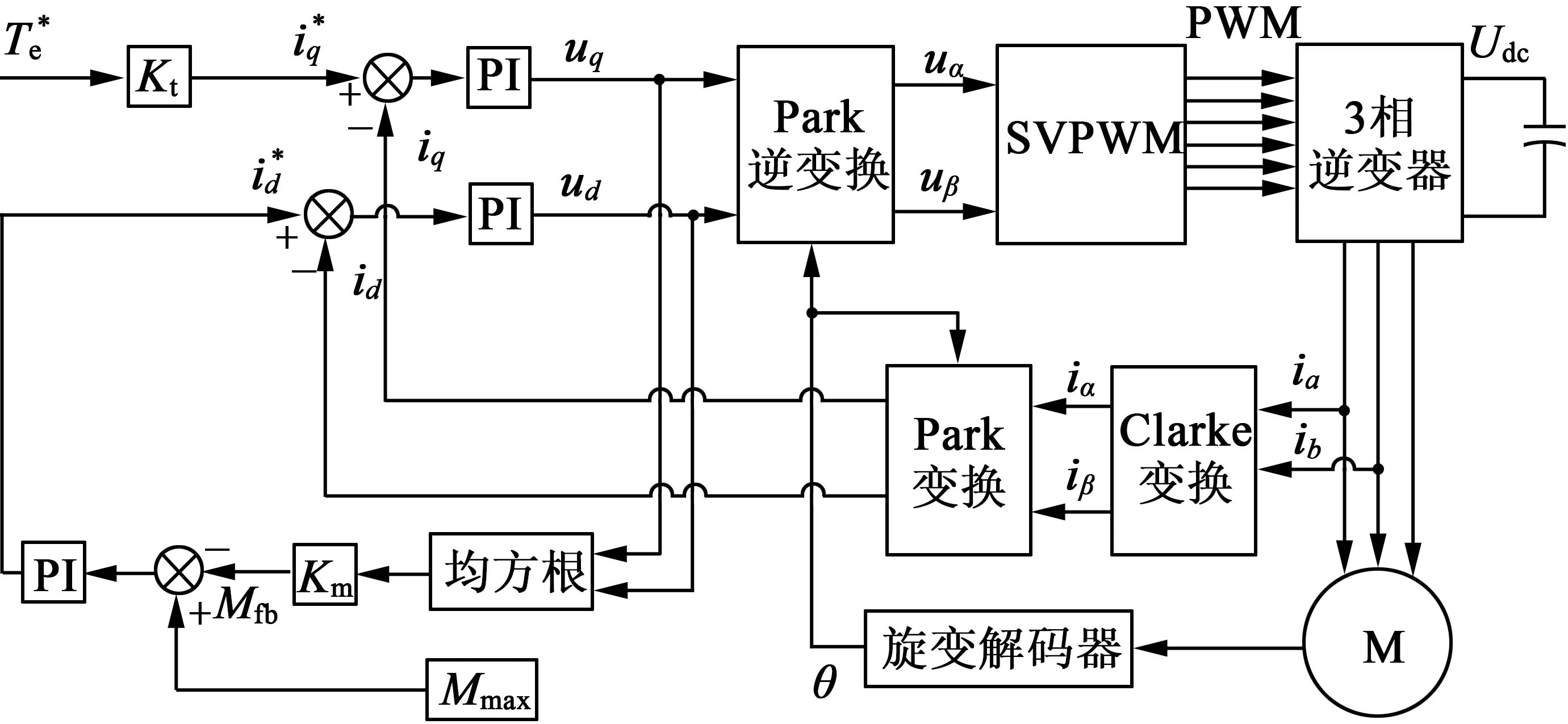
图1 电压外环弱磁控制系统框图

(6)
(7)
1.2 高速弱磁失控问题
采用上述弱磁控制方案研制了一台30kW的控制器。在现场试验时,发现控制器存在高速弱磁失控问题。主要现象:当弱磁深度达到2.2倍以上时,继续踩整车油门进行加速时,控制器出现保护。示波器显示弱磁失控时的电压和电流波形如图2所示。

图2 弱磁失控时电压和电流波形(截图)
2 改进型电压外环弱磁控制
2.1 弱磁失控问题原因分析
图3(a)定义了dq轴坐标系下电机运行轨迹中定子电压us和定子电流is,同时给出了电压角θu和电流角θi的定义。图3(b)为电机理论运行轨迹。OA段,电机运行在最大转矩电流比(MTPA)迹线上,系统获得最高运行效率;AB段,电机运行在最大电流圆迹线上,对应最大电流为Imax;BC段,电机运行在最大转矩电压比(MTPV)迹线上,系统获得最高电压利用率。图3(b)中,C点对应的弱磁电流Id_max满足下式:
(8)

(a)定子电压与电流(b)电机理论运行轨迹
图3 弱磁失控时运动轨迹分析
经过对高速弱磁失控问题进行深入分析和研究,发现问题的根源在于弱磁运行时运行轨迹被改变。具体的解释:当转速上升到一定程度后,即弱磁达到一定深度后,比如2倍以上弱磁,电压角θu已经摆到一定数值且该数值大于45°。由于系统运行在弱磁区,电流环响应速度受限,当踩油门继续加速时,id电流环和iq电流环均出现饱和(这一点,通过仿真和上位机监视已经得到验证)。一旦电流环出现饱和,由于id电流环和iq电流环的输出限幅值相同,因此电压角就被限制在45°。由于在高速弱磁运行时,电机反电势的相位已经上升到45°或更大的相位点,所以当逆变器输出的电压相位被钳位在45°时,逆变器将无法向电机输出电流,反而会出现电机向逆变器倒灌电流的现象。从观测的电流波形来看,电流有明显的阶跃,之后电流出现震荡,系统失控,发生过流保护。
2.2 弱磁失控问题抑制方法
本文采用差异限幅解决高速弱磁失控问题。原始的id电流环和iq电流环的限幅值Ud_max和Uq_max如下:
(9)
(10)
式中:θi_max为最大弱磁电流角,本设计中取为80°。
当出现id电流环和iq电流环同时饱和时,在差异限幅的作用下,电压角θu不会被钳位到45°,从而避免运行轨迹被改变导致的高速弱磁失控问题。
3 控制器设计
与控制器匹配的动力电池组额定电压为320V,电压波动范围为250~350V。控制器额定输出功率为30kW。
3.1 硬件设计
本文所设计控制器的硬件系统框图如图4所示。包含缓冲电容、IGBT模块、电流传感器、电源板、驱动板和主控板等。硬件设计主要分为核心元器件选择和硬件电路设计。

图4 硬件系统框图
功率回路采用叠层式母线排设计,以减小回路杂散电感和吸收电路的容量,改善控制器的电磁兼容性能。
本设计中,电机额定电流为150A,考虑电机的过载因数(2倍)和模块手册建议的纹波因数(1.2倍),计算得到峰值电流可达到509A,故选用600A/600V的FF600R06ME3模块,功率模块的选取是合理的。
主控芯片采用TI公司的TMS320F28335芯片,带有CAN控制器。旋转变压器解码芯片选用ADI的AD2S1200。
缓冲电容器选用薄膜电容,其容值按下式选取:
(11)
式中:Tsw为设计开关频率,这里设计为10 kHz;Ipk为交流输出电流最大值;ε为电压纹波系数,一般为5%。计算得到缓冲电容器容值为638 μF,实际选用为600 μF/500 V的电容器组。
分包括电源板、主控板和驱动板。电源板为主控板和驱动板提供辅助电源,由两个板载电源组成,控制芯片均为UC2844。其中,一路18 W电源主要产生控制板用的5 V、12 V、±15 V等稳压输出。另一路25 W电源产生6路25 V的驱动电源输出。
主控板完成电机控制器的矢量控制、各类检测信号的处理、保护逻辑等。主要包括直流侧电压采样电路、输出电流采样电路、温度采样电路、PWM整形输出电路、IGBT的过流保护信号调理电路、以及旋变解码电路等。
驱动板实现驱动信号(PWM信号)的隔离和放大。驱动板主要由PC929驱动光耦和驱动管组成。除了驱动功能,驱动板还能检测IGBT的过流信息,由PC929封锁驱动信号,并且将过流信息反馈给DSP用于故障报警。
3.2 软件设计
控制器软件系统所具有的主要功能及实现方式描述如下:
(1)控制功能:控制器接收整车控制器输出的转矩信号,对电动机进行控制。
(2)高效率功率变换:目标是运行效率达到85%的区域占总运行区域的50%以上。通过工程法实现最大转矩电流比(Maximum Torque Per Ampere, MTPA)控制,从而使得系统能够基本保持高效运行的状态。
(3)宽范围调速功能:采用电压外环弱磁控制策略实现宽范围调速,弱磁能力可达3倍以上。
(4)回馈制动功能:根据整车控制器发出的回馈请求,进行制动操作,同时对蓄电池充电。其实现方法是执行制动优先的制动指令,当接受到制动指令时,输出负转矩,并根据整车制动踏板的制动深度控制转矩大小,从而实现能量回收。
(5)控制器保护功能:控制器具备短路、过流、直流过压、直流欠压、过热保护、电机超速保护。
(6)故障自诊断及保护功能:在电机控制器及电机出现故障时,能诊断故障等级,根据故障等级采取不同的处理方式,防止故障扩大。
(7)通讯功能:控制器使用CAN通讯。
软件系统架构如图5所示,其中SPI通讯控制AD2S1200,实现电机位置的读取;CAN通讯用于与整车控制器通信;SCI通讯用于上位机调试;E2PROM用于保存上电初始参数,并记录重要运行参数;TIME2用于1 ms时间计数。

图5 软件系统架构图
图6(a)为主程序流程图。当预充电完成后,控制器开始工作,并响应整车指令。当由于通信故障或其它原因导致控制器接收不到运行指令时,控制器将执行指令回零操作。图6(b)为主中断流程图。进入中断后首先读取电机位置信号,并根据整车转矩指令分别经过坐标变换模块、MTPA模块、弱磁控制模块和SVPWM调制模块等,最终产生用于下一个中断周期的PWM寄存器值。

(a)主程序(b)主中断程序
图6 主要流程图
4 实验验证
本文所设计的控制器用于控制一台30 kW的IPMSM,其额定转速3 000 r/min,额定转矩95.5 N·m,峰值转速9 000 r/min,峰值转矩191 N·m。将该电机及其控制器安装到某整车厂的一款电动汽车上进行试验,设计最高行驶速度120 km/h。由于该电动汽车配置了一款减速比为7.55∶1的减速箱,最高时速时对应的电机最高转速为9 000 r/min。
图7为额定电压下,控制器带额定负载时的工作波形。图中分别显示了直流侧电压Udc、交流输出电压uuv和三相输出电流。从图7中可以看出,三相电流最大偏差为0.5 A,一致性较好。

图7 实验波形
实验结果表明,通过采用MTPA算法可以有效提高系统效率。系统电动运行时最高效率达95.1%,高效区(效率≥85%)范围为80%;发电运行时最高效率为92.2%,发电高效区(效率≥85%)范围为65%,两者均大于要求的50%。
图8为控制器路试实验波形(上位机显示波形)。从图8上可以看出,电机最高运行转速标幺值已经达到3(转速基值为3 000 r/min),满足整车运行要求。在弱磁区运行时,实际电压利用率稳定在电压利用率上限0.9。

图8 路试实验波形
5 结 语
本文以电动汽车为应用背景,研制了一台30 kW的IPMSM控制器。控制器采用了工程MTPA算法和电压外环弱磁控制策略,重点分析并解决了电压外环弱磁控制策略中存在的高速弱磁失控问题。指出了弱磁失控的根源在于弱磁运行时电流环饱和导致运行轨迹被改变,并提出了差异限幅的解决办法。电压外环弱磁控制策略具有控制简单,对电机适应性强等优点。通过整车试验,本文所研制的控制器具有良好的稳定性和动态响应性,值得在工程应用中推广。
[1] WU S,REIGOSA D D,SHIBUKAWA Y,et al.Interior permanent-magnet synchronous motor design for improving self-sensing performance at very low speed[J].IEEE Trans. Ind. Appl.,2009,45(6):1939-1946.
[2] CONSOLI A,SCARCELLA G,SCELBA G,et al.Steady-state and transient operation of IPMSMs under maximum-torque-per-ampere control[J]. IEEE Trans. Ind. Appl., 2010, 46(1): 121-129.
[3] 罗德荣,曾智波,黄守道,等.电动汽车用永磁同步电机超前角弱磁控制[J]. 湖南大学学报(自然科学版),2011,38(3):40-44.
[4] 金宁治,王旭东,李文娟.电动汽车PMSM MTPA控制系统滑模速度控制[J].电机与控制学报,2011,15(8):52-58.
[5] 黄鹏,黄雷,苗长云,等. 考虑饱和效应的IPMSM最大转矩电流比控制[J].电力电子技术,2011,45(2):41-43.
[6] 廖勇,伍泽东,刘刃.车用永磁同步电机的改进MTPA控制策略研究[J].电机与控制学报,2012,16(1):12-17.
[7] 郭仲奇,罗德荣,曾智波,等.一种新的内置式永磁同步电机弱磁控制方法[J].电力电子技术,2011,45(3):44-47.
[8] KIM S-H,SEOK J-K.Finite-settling-steps direct torque and flux control for torque-controlled interior PM motors at voltage limits[J].IEEE Trans. Ind. Appl.,2014,50(5):3374-3381.
[9] 张鹏.永磁同步电动机弱磁调速控制方法的研究[D].天津:天津大学,2007.
[10] 魏克新,陈峭岩.基于自适应无迹卡尔曼滤波算法的锂离子动力电池状态估计[J].中国电机工程学报,2014,34(3):445-452.
Interior Permanent Magnet Synchronous Motor Controller Based on Improved Voltage Outer Loop Flux-Weakening Control
CHENGuo
(Zhongshan Polytechnic,Zhongshan 528040,China)
The voltage outer loop flux-weakening control applying for interior permanent magnet synchronous motor was studied and realized in this paper. The voltage outer loop was added into the space vector control system, and the reference, the feedback and the output of the loop were the limit of voltage utilization ratio, the actual voltage utilization ratio and the reference of flux-weakening currentidrespectively. A 30 kW prototype was built, and the detailed design process of hardware and software was presented. Flux-weakening failure of the algorithm was discovered by vehicle test, and the reason was attributed to the magnitude limitation part by analyzing the movement track. An improved voltage outer loop flux-weakening control based on discrepant magnitude limitation was proposed, and the feasibility was verified by vehicle test.
interior permanent magnet synchronous motor (IPMSM); controller; flux-weakening; voltage outer loop; flux-weakening failure; discrepant magnitude limitation
2015-11-21
TM341;TM351
A
1004-7018(2016)05-0044-04
陈果(1982-),男,硕士,讲师,研究方向为逆变器设计、电机控制等。
猜你喜欢
中国新闻周刊(2022年16期)2022-05-09
园林科技(2021年2期)2022-01-19
石油沥青(2021年1期)2021-01-11
趣味(语文)(2020年6期)2020-11-16
中医眼耳鼻喉杂志(2019年2期)2019-04-13
石油管材与仪器(2019年1期)2019-03-08
舰船电子对抗(2018年2期)2018-06-19
筑路机械与施工机械化(2018年1期)2018-03-06
中国储运(2015年3期)2015-11-22
现代电子技术(2015年7期)2015-03-21
