
笼型风电机组结构的风力发电系统运行仿真分析
2016-06-07 02:32赛尔山伙加居曼常喜强郭小龙张新燕
四川电力技术 2016年2期
关键词:风力发电
赛尔山伙加·居曼,常喜强,郭小龙,张新燕
(1.新疆大学电气工程学院,新疆,乌鲁木齐 830047;2.国网新疆电力调度控制中心,新疆 乌鲁木齐 830003)
笼型风电机组结构的风力发电系统运行仿真分析
赛尔山伙加·居曼1,常喜强2,郭小龙2,张新燕1
(1.新疆大学电气工程学院,新疆,乌鲁木齐830047;2.国网新疆电力调度控制中心,新疆 乌鲁木齐830003)
摘要:在当今世纪能源日渐短缺、气候变化和环境日益恶化的全球背景下,风能作为一种清洁、可再生能源受到了高度的关注。介绍了笼型异步风力发电系统的类型和基本工作原理,并针对笼型异步风力发电系统建立了动态数学模型。其次,在 Matlab/Simulink 仿真环境下构建风电场并网系统的模型,通过仿真分析,研究笼型异步风力发电系统的稳定机理;并通过对风速扰动、线路断线故障、线路短路故障等各种扰动下的系统运行状况进行动态仿真,最后针对仿真结果提出提高系统稳定性的措施。
关键词:笼型风电机组;风力发电;系统运行;电压稳定性;动态仿真
Abstract:In the present century, energy is getting shorter, climate is changing and environment is becoming increasingly worse, so under this background, wind energy, a kind of clean and renewable energy sources, has attracted extensive attention. The type and basic working principle of cage asynchronous wind power generation system are introduced, and the dynamic mathematical model of cage asynchronous wind power generation system is established. Then, the model of wind power grid system is built using Matlab/Simulink. Through the simulation analysis, the stabilizing mechanism of cage asynchronous wind power generation system is studied, and the dynamic simulation of system operating condition is carried out under different disturbances such as wind speed variation, line breaking fault and short-circuit fault. Finally some conclusions are obtained, and the measures to increase the stability of cage asynchronous wind power generation system are proposed.
Key words:cage-type wind turbine generator system; wind power generation; system operation; voltage stability; dynamic simulation
0引言
由于传统的化石能源正在逐渐枯竭,风能作为一种储量巨大的可再生绿色能源,得到全世界的广泛重视和快速发展。随着风电的迅速发展,大规模风电场的陆续出现,风电装机容量在电力系统中所占的比例越来越大,风力发电对电力系统的影响也逐渐增大,严重故障情况下甚至会引起系统不稳定。因此,对各种扰动下的鼠笼式异步风力发电系统能否维持稳定运行进行研究,以及如何提高其运行的稳定性是十分必要的[1-2]。
在 Matlab/Simulink 仿真环境下构建风电场并网系统的模型,而风电场并网系统是由鼠笼式异步发电机构成的。研究笼型风电机组结构的风力发电系统的电压失稳机理,以及通过对线路断线故障、风速扰动、线路短路故障等各种扰动下的系统运行状况进行动态仿真,详细分析各种仿真过程,最后得出一些有意义的结论,并提出提高笼型风电机组结构的风力发电系统稳定性的措施。
1风力发电机组动态数学模型
风力发电机组动态数学模型是由风速模型、风力机模型、传动机构模型以及异步发电机模型组成,见图1[3]。

图1 风力发电机组基本模型
1.1风速模型
风速具有明显的间歇性和随机性,在一般情况下,根据统计规律分析,风电场风速符合威布尔(Weibull)分布。
(1)
式中:V是风速;f(V)是风速分布函数;A、K分别是威尔布尺度系数和形状系数。为了精确描述风速间歇性和随机的特点,通常采用4种形式的风速来模拟实际风速变化情况:基本风VA、阵风VB、渐变风VC和随机风VD。
1.2风力机与传动部分模型
1)风能转换模型。风轮机主要包括齿轮箱、轮毂、叶片和传动轴等传动装置[4]。叶片的作用是将风能转换成机械转矩。风力机的机械转矩关系式如式(2)。
(2)
式中:TW为风力机的机械转矩;ρ为空气密度;CP为风力机转换效率系数;R为叶片半径;VW为作用于叶片的风速;λ为叶尖速比,λ=ωR/VW(其中:R为叶片半径;ω为风力机转速)。
2)传动机构的模型[5]。风力机组的传动机构由轮毂、齿轮箱和传动轴组成。轮毂连接叶片和齿轮箱,轮毂具有较大的惯性,齿轮箱和联轴器传递风力机和异步发电机之间的转矩,传动部分的模型为
(3)
式中:Tm为传动机构输出转矩;TW为传动机构输入转矩;τh为风力机惯性时间常数。在简化模型中把齿轮箱位理想的刚性齿轮组,传动轴的惯量等效到发电机转子中。
3)桨距角控制系统[6-7]。风轮机风能转换效率系数是叶尖速率比和桨距角的函数。一旦风速变化风轮机运行点将发生变化,为了保证风能的转换效率和风轮机的平稳输出,把风轮机的桨距进行调整。风力发电机中桨叶的控制方式主要有两种:一种是定桨距风机,另一种是变桨距风机。变桨距控制系统一般用式(4)表示。
(4)
式中:β为桨距角;βref为由当前转速求得的桨距角的参考值;βref是Cp与λ的函数,表示为βref=ζ(CP,λ);τ为变桨距控制系统的惯性时间常数。
1.3异步发电机的模型
大量的研究表明,异步发电机的三阶机电暂态模型能较准确地描述其动态过程,如式(5)所示[8]。
(5)

异步发电机的转子运动方程为
(6)
式中:Mm为发电机的机械转矩;ME为电磁转矩;Tj为发电机的转子惯性时间常数。于是发电机的电磁转矩方程为
(7)
式中:Pe为发电机的电磁功率,(p.u.);Re表示取实部;ω为发电机角速度,(p.u.)。
2基于Matlab/Simulink 的异步风电场仿真
2.1仿真系统概述
应用Matlab/Simulink仿真环境搭建的仿真系统模型,以某个风电场中的8台额定容量为1.5 MW的鼠笼式风力发电机组为例,系统拓扑结构如图2所示。其中将每两台鼠笼式异步风力发电机当作1台2×1.5 MW的鼠笼式异步风力发电机组来看,于是,风电场有3台2×1.5 MW风力发电机组构成的总装机容量为9 MW的模型。每台2×1.5 MW风力发电机组的出口电压为575 V,经过升压变压器将其升压到25 kV,然后通过25 km双回输电线路输送,并与120 kV无穷大系统相连。

图2 笼型异步风力发电系统图
2.2仿真分析[9-11]
首先研究了电压失稳机理,然后分别对风速扰动、线路断线故障以及线路短路故障3种状况下对风电系统的动态过程进行仿真,并且分析其对风电系统的稳定性和规律。
2.2.1电压失稳机理研究
1)把25 km的输电线路假设成单回输电线路,在仿真过程中风速保持额定风速不变,额定风速为9 m/s,t=3 s时输电线路出现三相短路故障,0.12 s后切除故障,仿真时长为5 s。

图3 电压失稳机理仿真图
从图3仿真曲线易知,系统发生故障时母线电压大幅下降,0.15 s故障切除后母线电压先有所回升,随后边振荡边电压持续下降,最后电压失去稳定。
2)与1)同等条件下,增大风电机组惯性时间常数H(s),母线电压的动态仿真图如图4所示。

图4 增大风电机组惯性时间常数H(s)的母线电压仿真图
与图3相比,0.15 s故障切除后母线电压开始回升,紧接着经过短暂振荡持续上升,电压重新恢复到原来的状态,电压依然保持稳定。
2.2.2风速扰动
假设以8 m/s的最初时刻风速开始,经过3 s的上升时间,风速达到11 m/s,但在t=2 s时刻时出现渐变风,渐变风的风速幅值为3 m/s,仿真时间为20 s。
1)当25 km输电线路为双回输电线路时,进行仿真系统分析,仿真结果如图5所示。
由图5可知,在风电系统双回输电线路状况下,电机的转速和有功功率随着风速的增大而逐渐增大,当风速上升到11 m/s时,风电场出口25 kV母线电压和风力发电机的无功功率随着风速的增大而减小。出现一段时间的波动,随后风力发电机的有功功率、无功功率、风电场出口25 kV母线电压和转速均达到某一稳定值并都稳定下来,因此,系统没失稳。
2)与1)相同条件下,当25 km的双回输电线路改为单回输电线路时,15 s时发生三相短路,故障0.1 s后切除。仿真结果如图6所示。

图5 双回输电线路时的风电系统仿真图

图6 单回输电的风电系统仿真图
由图6得知,输电线路是单回输电线路情况下,当风速上升到11 m/s时,风力发电机的有功功率和无功功率经过一段时间的变化后均迅速下降为0,风力发电机转速逐渐增大,系统崩溃。因此,系统失去稳定。
3)与1)相同条件下,当风速达到14 m/s时,仿真结果如图7所示。

图7 双回输电的风电系统仿真图
由图7可知,在输电线路为双回输电线路情况下,当风速上升到14 m/s时,双回输电线路系统的性质与以上单回输电线系统路的性质相似。
4)与3)相同条件下,在风电场出口处接入容量为7 MVA的无功补偿装置STATCOM后进行仿真,仿真时长为50 s,结果如图8、图9所示。

图8 双回输电的风电系统中的STATCOM的仿真图

图9 双回输电的风电系统接入STATCOM后的仿真图
由图8可知,在仿真过程中无功补偿装置STATCOM发出无功。由图9可知,在双回输电线路的风电系统接入STATCOM的情况下,当风速由8 m/s变到14 m/s时,随着风速的增大风力发电机的转速和有功功率逐渐增大;同时风力发电机的风电场出口25 kV母线电压和无功功率减小,经过一段时间的波动后,所有参数都在某一值稳定下来:因此,整个系统没失稳。
2.2.3断线故障过程仿真
假设仿真过程中额定风速保持9 m/s不变,当仿真运行到4 s时,在25 km双回输电线路中的其中一回发生断线故障,仿真结果如图10所示。
由图10可知,当双回输电线路其中一回发生断线故障时,风力发电机的各个参数经过一段时间的波动后,都在某一稳定值附近稳定下来,因此,系统没有失稳。
2.2.4短路故障
假设风速保持在额定风速9 m/s不变,当系统运行到6 s时,发生短路故障,仿真时间长为20 s。
1)当近母线端发生三相短路故障时,系统运行到0.09 s后切除故障,仿真结果如图11所示。
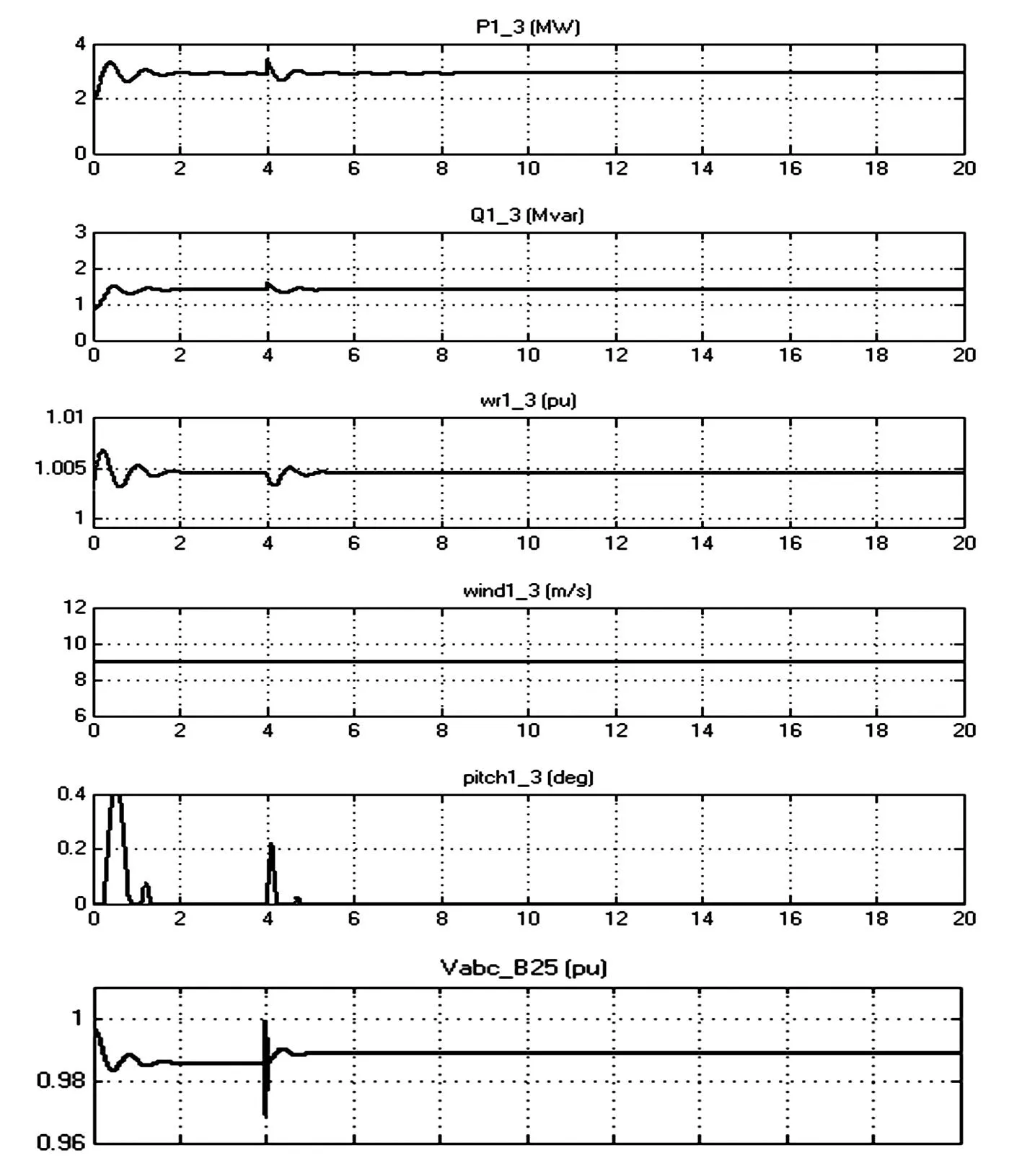
图10 双回输电线路中的其中一回发生断线故障后的仿真图
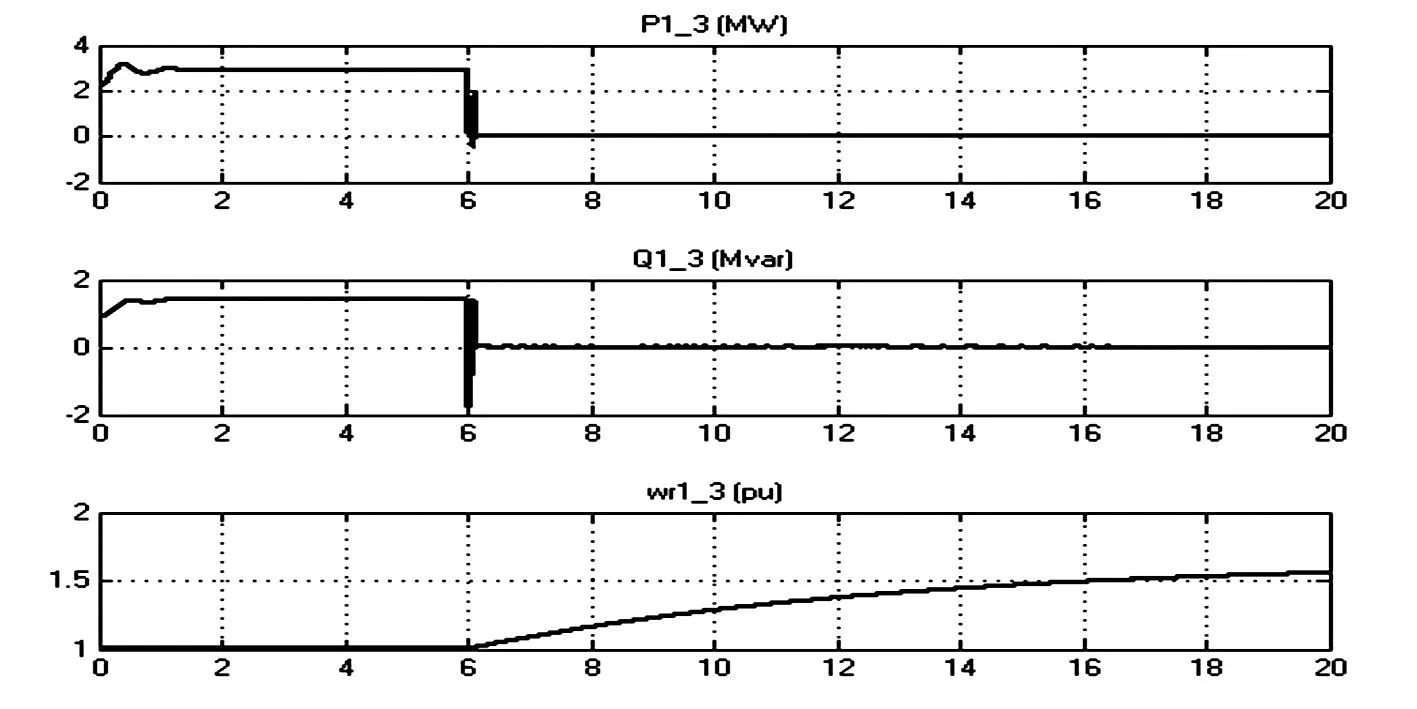
图11 近母线端发生三相短路故障时的系统仿真图
由图11可知,在近母线端6 s时发生三相短路故障的情况下,风力发电机的有功功率和无功功率在一段时间的变化后均立刻下降为0,发电机的转速会不断增大,系统崩溃。因此,整个系统失稳。
2)在近母线端发生单相接地短路故障时,故障0.09 s后切除,系统仿真结果如图12所示。

图12 近母线端发生单相接地短路故障时的系统仿真图
由图12得知,近母线端6 s时发生单相接地短路故障的情况下,当故障切除时间为0.09 s时,风力发电机的有功功率和无功功率以及转速在在一段时间的上下波动后,其都在某一稳定值范围稳定下来。因此,整个系统没有失稳。
3)在远离母线端发生三相短路故障时,故障0.09 s后切除,系统仿真结果如图13所示。

图13 远母线端发生三相短路故障时的系统仿真图
由图13得知,在远母线端发生三相短路故障的状况下,其性质与近母线端发生单相接地短路故障时的性质相似。
4)与1)相同条件下,在风电场出口接入7 MVA的无功补偿装置 STATCOM后进行仿真,其结果如图14、图15所示。

图14 风电系统中的STATCOM仿真图

图15 风电场出口接入STATCOM后系统的仿真图
由图14得知,在仿真过程中无功补偿装置 STATCOM发出无功;由图15得知,当近母线端6 s时发生三相短路故障时,风电系统接有无功补偿装置STATCOM下的性质与以上的性质相类似。
5)与 4)相同条件下,故障0.12 s后切除,系统仿真结果如图16、图17所示。
由图16得知,在仿真过程中无功补偿装置STATCOM发出负无功;由图17得知,当故障切除时间为0.12 s时,风力发电机的有功功率和无功功率在一段时间的变化后迅速下降为0,发电机转速不断增大。因此,整个系统失稳。

图16 近母线端发生三相短路故障时风电系统的STATCOM仿真图

图17 近母线端发生三相短路故障时接入STATCOM后系统的仿真图
3结论
对由笼型异步风力发电机组组成的简单风电系统进行了动态仿真分析。主要结论如下:
1)由于鼠笼式风力发电机相当于一个无功负荷,需要从系统中吸收无功功率,所以需要在风电场出口安装无功补偿装置,这里选择用STATCOM,通过仿真结果易知,对于一个失稳的风电系统,当接有无功补偿装置后,可以达到系统稳定运行。
2)在相同风速扰动情况下,双回输电线路比单回输电线路更有利于系统的稳定。因此,优化设计输电线路、增强线路的网架结构,有利于风电系统的稳定。
3)在相同的故障点和故障切除时间情况下,故障越严重越会影响系统稳定性。
4)在相同故障情况下,系统故障切除时间越短,越有利于风电系统的稳定。
针对以上结论,提出以下几种提高鼠笼式异步风力发电系统的稳定性的措施:1)改善风电机组的机械参数;2)优化网架结构;3)采用变桨距控制;4)添加动态制动电阻;5)添加动态无功补偿装置;6)快速切除故障。
参考文献
[1]张瑞明,张新燕. 基于普通异步发电机和双馈风力发电机静态数学模型的系统静态电压稳定性研究[J].电网技术,2011(1):175-179.
[2]闫存富,孔令云,路素青.小型风力发电机常见故障分析[J].电源技术,2014(12):2451-2452.
[3]雷亚洲.Gordon Lightbody.国外风力发电导则及动态模型简介[J].电网技术,2005,25(12):27-32.
[4]范高峰,赵海翔,王伟胜,等.基于恒速风电机组的风电场并网过程仿真[J].电网技术,2007,31(14):20-23.
[5]辜承林,陈乔夫,熊永前.电机学第二版[M].武汉:华中科技大学出版社,2005.
[6]DlgSILENT Gmb H.Dynamic Modelling of Doubly-fed Induction Machine Wind Generators[R].Technical RePort,Aug 2003.
[7]李钢,慈建斌,李洪星,等. 基于PSCAD/EMTDC的风光互补并网发电系统建模与仿真[J]. 电源技术,2014(10):1893-1897.
[8]院海,晁勤,吐尔逊.基于PSCAD的并网型风机建模及仿真[J].可再生能源,2008,26(2):15-18.
[9]Trudnowski D J,Gentile A,Khan J M,et al. Fixed Speed Wind Generator and Wind Park Modeling for Transient Stability Studies[J]. IEEE Transactions on Power Systems,2004,19(4):1911-1917.
[10]魏巍,王渝红,李兴源,等.大型风电场建模及接入甘肃嘉酒电网仿真分析[J].电力系统自动化,2009,33(18):96-101.
[11]韩肖清,胡月星,张伟,等.基于MATLAB的并网风电场动态仿真[J].太阳能学报,2008(2):175-179.
基金项目:大规模风电光伏接入电网无功电压优化控制与综合评价技术研究(SGXJ0000DKJS1440234)
中图分类号:TM614
文献标志码:A
文章编号:1003-6954(2016)02-0010-05
作者简介:
赛尔山伙加·居曼(1989),硕士,主要研究风发电及并网技术;
张新燕(1964),博士研究生、教授、硕士生导师,主要从事风力发电技术、风机并网故障分析、故障诊断等方面的研究工作。
(收稿日期:2015-11-12)
猜你喜欢
东方教育(2016年13期)2017-01-12
中小企业管理与科技·上旬刊(2016年12期)2017-01-05
科学与财富(2016年29期)2016-12-27
山东工业技术(2016年23期)2016-12-23
中国市场(2016年32期)2016-12-06
科技视界(2016年16期)2016-06-29
科技视界(2016年8期)2016-04-05
科技视界(2015年25期)2015-09-01
