
激光多普勒差频条纹处理电路设计
2016-06-14 02:11季园媛张雄星刘光海
西安工业大学学报 2016年4期
王 伟,季园媛,张雄星,刘光海
(1.西安工业大学 光电工程学院,西安 710021;2.四川物科光学精密机械有限公司,绵阳 621900)
激光多普勒差频条纹处理电路设计
王伟1,季园媛1,张雄星1,刘光海2
(1.西安工业大学 光电工程学院,西安 710021;2.四川物科光学精密机械有限公司,绵阳 621900)
摘要:为了解决全光纤激光速度干涉系统产生的多普勒信号的实时采集和处理问题,提出了一种以现场可编程逻辑门阵列(FPGA)为核心的信号采集和处理系统的实现方案.系统以Cyclone IV的FPGA为核心控制模块,结合信号调理电路、A/D电路及D/A转换电路构成多普勒信号的采集和处理系统,完成针对振动信号的速度和位移信息的解调.采用音叉搭建了振动测试平台,通过示波器可同时观测目标的速度和位移变化.研究结果表明:所设计的测振系统速度测量范围为0.1~30 m·s-1,频率测量范围为DC-1 MHz,频率测量误差为1%.
关键词:激光干涉;现场可编程门阵列;信号采集;频率测量
frequency measurement
测振技术目前分为两大类接触式测量和非接触测量.接触式测量是通过在测量物体上安装压电传感器,必须依附在被测物体表面.在特殊的振动测试中,由于传感器大小的局限,会破坏原有的振动状态,空间较小可能无法安装,从而增加测试难度.激光多普勒测振[1]是利用光散射原理和多普勒效应,根据激光的相干性,通过获得目标物体速度变化引起的干涉条纹变化.光波比无线电波的波长短、频率高,以其频移和波长作为尺子去度量被测目标的速度和位移,精度高.但光的多普勒频移一般在几十MHz量级,光电探测器和数据采集电路的带宽相应的就需达到百MHz量级,这对后续的光电探测和信号采集电路提出了较高要求,因此,激光多普勒信号的采集和处理是激光多普勒测量系统工程实现上的难点之一.文献[2]提出在信号处理过程中,通过高速数据采集卡把多普勒信号采集到计算机中,借助Matlab平台,选取时频分析中的Wigner_Ville分布对采集进入的多普勒信号进行分析.这种方式是在下位机中进行采集,在上位机中解算,实现数据的离线处理;文献[3]设计了基于数字信号处理器(Digitial Signal Processor,DSP)的数据采集和处理系统,系统采用AD芯片采样,片外随机存取存储器(Random Access Memory,RAM)缓存,液晶屏显示的方式采用快速傅氏变换(Fast Fourier Transformation,FFT)算法进行数据处理,这种处理算法复杂,计算量大;文献[4]设计了以现场可编程逻辑门阵列(Field Programmable Gate Array,FPGA)为核心的处理模块,在光路部分通过正交分解的方式产生两路正交信号采用模数转换芯片采集,经过FPGA预处理后通过RS-232的方式传输上位机;文献[5]研究了基于FPGA的直接测频法的测频精度分析,提出了采用直接测频法误差来源于开始阶段采样的量化误差,以及终止采样阶段的量化误差;文献[6-7]提出了目前常见的方式主要是通过高速通信接口将数据传递到上位机中进行离线数据处理.
基于此,本文从优化数据处理算法实现在下位机中数据处理,实现实时观测的角度进行了研究.设计了一种针对多普勒信号的数据采集和处理电路.系统以FPGA为核心处理芯片,采用多周期同步测频算法,实现对采集的多普勒信号解调处理,从而得到物体表面的速度和位移,通过模拟信号输出方式.该方案将数据采集、信号处理算法以及输出集成在一片电路中,实现了振动信号的实时连续观测.搭建了实验测试平台,通过对不同频率的音叉进行测量,验证了本系统的可靠性和精度.
1硬件电路设计
全光纤多普勒测量系统输出的光差频信号经光电探测器实现光电转换,转换后的电信号通过所设计的数据采集和处理板,实现信号的采集处理.所设计的系统框图如图1所示.电信号经电流电压转换电路、经滤波及放大电路预处理后送给A/D转换成数字信号,送入FPGA中.由FPGA中的硬件逻辑电路对数据进行缓存,在FPGA的逻辑控制下,将解算出的速度及方向变化量通过模拟量的形式输出.本设计的系统主要模块包含了FPGA的最小系统、电源模块、信号调理电路、A/D转换电路及D/A转换电路等部分.
图1 数据采集和处理系统原理框图
1.1信号调理电路设计
在本设计中,光路测量部分采用1 550 nm的分布反馈式激光器(Distributed Feedback Laser,DFB-LD),采用光外差检测[8]输出时,光电探测器接收到的光信号功率仅为微瓦(μW)的数量级,以至于输出的多普勒信号非常微弱,噪声成分很大,且具有较大的直流偏置.该信号很容易被其他噪声干扰.为了提高信噪比,保证后续信号处理的准确性,必须对光电探测器输出的信号进行去偏置、放大和滤波.本文采用带通滤波器的设计方案,可以实现在特定频段的频率传递信号,衰减这一频段以外的所有信号.由于多普勒信号的频率较高,可达40 MHz,所以本文选择了亚德诺半导体(Analog Devices,Inc.,ADI)公司的高速、高频的运放芯片AD8045,其具有低噪声、电压反馈和高速放大等特性,满足本设计的需求.
如图2所示,输入信号为光电探测器输出的包含光差频信息的多普勒信号.R1、C2构成低通滤波器将高频噪声阻断,R3、C1构成高通滤波器将低频噪声阻断,两者串联接在运放的同相输入端,通过反馈电阻R5来改善滤波特性.通过Pin6管脚将信号输出到后续电路.
1.2A/D转换电路设计
多普勒信号经调理电路后,送入A/D转换电路转换成数字信号.根据系统设定的测速范围在0.1~30 m·s-1,多普勒的频移fd表达式为
fd=2v/λ
(1)
式中:λ为激光波长;v为振动目标的瞬时速度.
计算可得信号频率最高不超过40 MHz,依据采样定理知信号采样速率至少为80 MHz.本系统选择德州仪器公司的8 位高速模数转换芯片ADC08200,该芯片的最高采样速率可达200 MHz.电路原路图如图3所示.通过外接参考源ADR441ARZ芯片来产生2.5 V的电压作为电压参考源接入芯片Pin3管脚,其输出的8位数据总线D0-D7和FPGA的I/O相连接,将数据传输到FPGA中.
图2 信号调理电路设计

图3 A/D转换电路设计
1.3FPGA设计
多普勒信号经A/D转换后变为数字信号传送给FPGA,在FPGA中进行数据的解算.本系统采用Altera公司的EP4CE15F17C8N,它具有15 408个逻辑单元.FPGA是一种多电源需求的芯片,根据本系统设计要求,系统采用±5 V外接电源供电,满足前端信号调理电路和A/D转换电路的需求,选用多块电压转换芯片提供FPGA所需要的3.3 V、2.5 V和1.2 V的供电需求.所设计的FPGA数字逻辑模块如图4所示.
图4 FPGA数字逻辑框图
图4包含了时钟模块、A/D逻辑模块、数据处理模块、FIFO缓存模块、D/A逻辑模块以及联合测试工作组(Joint Test Action Group,JTAG)下载模块.在工作过程中,通过时钟模块提供系统所需的工作时钟.FPGA首先通过A/D控制模块检测是否接受到多普勒数据采集完毕的使能信号,如果收到就读取数据并采用异步FIFO缓存.当FIFO接近全满的状态时启动,在信号处理逻辑模块进行频率测量.将解算出的速度信号和方向信号通过D/A控制模块输出,从而完成整个采集处理逻辑控制.
1.4D/A转换电路设计
通过FPGA解算得到被测振动物体表面的速度变换和方向变换,通过两路D/A转换模块以在模拟信号的输出方式,通过示波器可实时观测.由于系统是高速电路,在D/A的选型时需要考虑D/A芯片的转换速率.本系统选用的是8位TLC5602C模数转换芯片,常用于高速信号处理中,取样速度最高可达20 MHz,可以满足系统对转换速率的需求,其设计电路如图5所示.两路D/A的数据总线D0~D7和时钟控制口分别和FPGA的I/O相连,转换结果通过芯片的Pin6输出.
图5 D/A转换电路设计
2多周期同步频率测量算法
A/D转换模块转换得到数字量,传输给FIFO模块,进行数据的缓存.采用异步FIFO,在数据暂存的同时,读取数据进行信号频率测量.采用的多周期同步频率测量[9-10]方法以直接测频法[6]为基础,该方法保证了闸门信号与被测信号的同步,实现了全频段等精度测量,测量原理如图6所示.
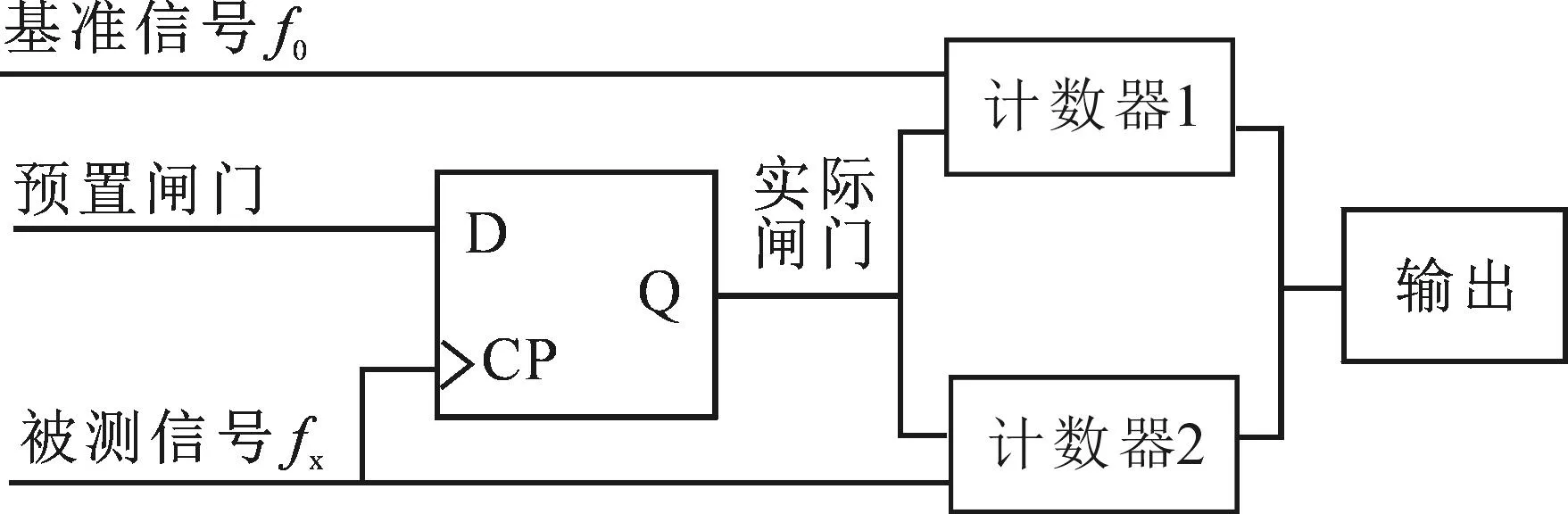
图6 多周期同步频率测量原理图
在系统的运行过程中,首先开启预设闸门信号,所设的两个计数器未开始计数,需要等待被测信号fx的上升沿来作为触发信号,这时系统控制对应的D触发器电路,触发器发出允许系统开始计数的信号,计数器1开始对系统频率信号f0的脉冲开始计数,计数器2开始对被测信号fx的脉冲开始计数.在关闭闸门信号时,系统中的两个计数器不停止计数,需等到fx的上升沿作为终止信号,才停止计数.完成整个测频过程.
图6中计数器1所计得的脉冲个数为N0,计数器2所记得脉冲个数为Nx,由公式
N0·T0=Nx·Tx
(2)
可得被测信号的频率为
fx=Nx/N0·f0
(3)
3实验结果及分析
3.1系统性能验证
采用音叉搭建振动测试平台.实验所用仪器设备包括激光器、分束器、线性电源、示波器、音叉、数据采集和处理电路板等.采用Tektronix 数字示波器实行波形监测,可以实时观测到被测对象的速度和位移变化.实验结果如图7所示.
图7中,通道1是光电探测器输出的原始多普勒信号,通道2为D/A输出的被测音叉的瞬时速度变化,通道3是D/A输出的被测音叉的位移方向变化.实验采用的音叉本征频率为256 Hz,测振系统输出的速度信号的频率为256.1 Hz,实验结果表明系统误差为0.04%.
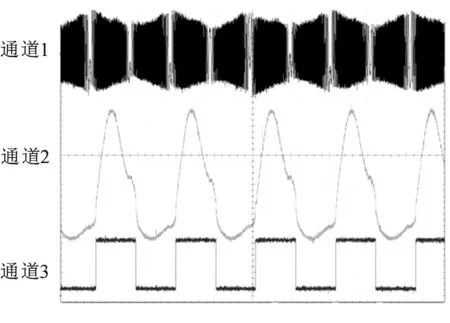
图7 音叉测试效果图
实验采用了9组不同频率(128~1 024 Hz)的本征音叉进行验证,如图8所示,由此结果可以看出,实际测量频率和理论测量频率误差在1 Hz的范围内,测量结果显示该装置对低频段的振动频率测量准确度很高,误差小。
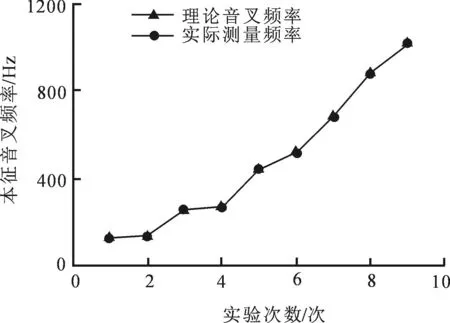
图8 实测信号和本征音叉的对比
3.2误差分析
算法误差[13-15]表达式为fd=2v/λ,可以看出误差主要来自fd和λ,通过误差传递公式ΔV=λ/2×Δfd+fd/2×Δλ产生实验数据误差,其中Δfd为真实频率与测的频率的差值,Δλ为标称波长与实际波长的差值.
Δfd的差值主要来源于算法误差.本设计中采用的多周期同步测频法,通过信号发生器产生不同频率的方波,通过QuartusⅡ软件的SignalTap在线监控功能,所观测到的测量频率和实际频率值对比见表1.

表1 频率测量实际值和测量值对比
Δλ的误差主要来源于DFB激光器频率漂移产生的误差,DFB激光器最大特点是具有较好的单色性(即光谱纯度),其线宽普遍可以做到1 MHz以内,且具有较高的边模抑制比(Side-Mode Suppression Ratio,SMSR),因此可认为频率漂移产生的误差可以忽略不计.
从上述分析可以看出,该装置对振动频率测量准确度很高,线性度较好.实验结果表明,所设计的信号采集和处理系统的精度较高,整体误差不超过1%,可应用于实际的工程中.
4结 论
1) 本文设计了全光纤激光多普勒测振仪的信号采集与实时处理系统.解决了针对于多普勒信号本身具有较大偏置和噪声的非稳态信号的采集和在FPGA中进行数据处理,对振动信号的瞬时速率进行实时输出的问题.
2) 采用多周期同步测频法,采用Verilog HDL编写时序代码,及各模块之间的逻辑控制.通过仿真验证了整体误差不超过1%,具有较高的精度.
3) 通过音叉实验验证整个系统的正确性,可以满足设计需求,对振动信号的实时解算和处理有实际的应用价值.
参 考 文 献:
[1]吕宏诗,刘彬.激光多普勒测振技术的最新进展[J].激光技术,2005,2(4):176.
LYU Hongshi,LIU Bin.Latest Development of Laser Doppler Technique in Vibration Measurement[J].Laser Technology,2005,2(4):176.(in Chinese)
[2]钟莹,张国雄,张涛,等.时频分析在激光多普勒信号处理中的应用[J].光学技术,2007,33(2):281.
ZHONG Ying,ZHANG Guoxiong,ZHANG Tao,et al.Application of Time -frequency Analysis in Laser Doppler Signal Processing[J].Optical Technique,2007,33(2):281.(in Chinese)
[3]岳邦强,张元,王鸣.基于DSP的激光自混合干涉测振仪信号采集与处理系统[J].光学与光电技术,2009(2):44.
YUE Bangqiang,ZHANG Yuan,WANG Ming.Based on DSP of the Laser Self Mixing Interference Vibrometer Signal Acquisition and Processing System[J].Optical & Optoelectronic Technology,2009(2):44.(in Chinese)
[4]陈勇,钱剑敏,尚建华,等.基于FPGA的多普勒测振计信号采集与处理系统设计[J].现代电子技术,2013,36(17):125.
CHEN Yong,QIAN Jianmin,SHANG Jianhua,et al.Design of FPGA-based Signal Acquisition and Processing System for Doppler Vibrometer[J].Modern Electronics Technique,2013,36(17):125.
(in Chinese)
[5]韩艳峰.直接计数法瞬时测频的误差分析[J].测控技术,2014,33(9):154.
HAN Yanfeng.Error Analysis of Direct Counting Method of Instantaneous Frequency Measurement[J].Measurement and Control Technology,2014,33(9):154.
(in Chinese)
[6]高锐.基于FPGA的多周期同步频率计设计[D].长春:吉林大学,2013.
GAO Rui.Design of Synchronous Multi-cycle Frequency Meter Based on FPGA[D].Changchun:Jilin University,2013.(in Chinese)
[7]范亚斌.基于FPGA的频率计的设计[D].石家庄:河北科技大学,2009.
FAN Yabin.Design on Digital Frequency Meter Based on FPGA[D].Shijiazhuang:Hebei University of Science and Technology,2009.(in Chinese)
[8]王德田.光纤多普勒差拍干涉测速技术研究[D].绵阳:中国工程物理研究院,2008.
WANG Detian.Research of the Fiber Doppler Velocimeter[D].Mianyang:China Academy of Engnieering Physics,2008.(in Chinese)
[9]杨世锡,梁文军,于保华.振动信号多通道同步整周期数据采集卡设计[J].振动、测试与诊断,2013,33(1):23.
YANG Shixi,LIANG Wenjun,YU Baohua.Design of Vibration Signal’s Multi-channel Integer Period Synchronous Acquisition Card[J].Journal of Vibration,Measurement & Diagnosis,2013,33(1):23.
(in Chinese)
[10]魏西峰.全同步数字频率测量方法的研究[J].现代电子技术,2005,28(12):101.
WEI Xifeng.Complete Synchronization Digital Frequency Measure Method’s Research[J].Modern Electronics Technique,2005,28(12):101.
(in Chinese)
(责任编辑、校对潘秋岑)
Circuit of Laser Doppler Difference Frequency Fringe Design
WANGWei1,JIYuanyuan1,ZHANGXiongxing1,LIUGuanghai2
(1.School of Optoelectronic Engineering,Xi’an Technological University,Xi’an 710021,China;2.Sichuan P&S Optical and Fine Mechanics Co.,Ltd.,Mianyang 621900,China)
Abstract:In order to solve the problem of real time acquisition and processing of the Doppler signal generated by the whole fiber laser velocity interferometer system,a method of signal acquisition and processing system based on FPGA is proposed.The system is constituted with FPGA of cyclone IV as the core control module,combined with the signal conditioning circuit,circuit and A/D conversion circuit of A/D a Doppler signal acquisition and processing system,according to the velocity and displacement of vibration signal demodulation.The fork is used to build the vibration test platform,and the velocity and displacement changes are observed by the oscilloscope at the same time.The results show that the the range of velocity measurement of vibration system is in the 0.1~30 m·s-1,frequency measurement range is DC to 1 MHz,and the frequency measurement error is 1%.
Key words:laser interference; field programmable gate array(FPGA);signal acquisition;
DOI:10.16185/j.jxatu.edu.cn.2016.04.004
收稿日期:2015-09-28
作者简介:王伟(1973-),男,西安工业大学副教授,主要研究方向为微机控制技术.E-mail:15005804@qq.com.
文献标志码:中图号:TM932A
文章编号:1673-9965(2016)04-0277-06
