基于弹体动力学信息的速率陀螺滤波
2016-07-01 01:09陈红英罗文田
飞行力学 2016年3期
陈红英, 罗文田
(1.中国民用航空飞行学院 飞行技术学院, 四川 广汉 618307;2.中国民用航空飞行学院 航空工程学院, 四川 广汉 618307)
基于弹体动力学信息的速率陀螺滤波
陈红英1, 罗文田2
(1.中国民用航空飞行学院 飞行技术学院, 四川 广汉 618307;2.中国民用航空飞行学院 航空工程学院, 四川 广汉 618307)
摘要:针对使用低精度惯性器件的战术制导武器中速率陀螺精度低、噪声大的问题,提出了一种基于弹体动力学信息降低陀螺噪声的方法。该方法通过将弹体姿态动力学方程与扩展卡尔曼滤波算法相结合来构建滤波器,并在飞行过程中利用导弹的先验特征信息和实测的执行机构信息来实时校正陀螺的测量值;然后从理论上证明了所建立非线性滤波系统是局部可观测和有效的。仿真结果表明,该滤波方法可以有效地抑制速率陀螺的测量误差。
关键词:速率陀螺; 弹体动力学; 扩展卡尔曼滤波器; 局部可观测性; 半实物仿真
0引言
速率陀螺是导弹姿态控制系统的基本测量装置,对于小型战术导弹,由于其作用对象、作用距离和成本等原因,越来越多地使用微机械电子系统(MEMS)陀螺。MEMS陀螺具有成本低、尺寸小、重量低等优点;但因其精度较低,且需要直接安装在弹体上测量弹体的角速度而制约了其应用。由于飞行过程中的动态环境较为恶劣,使得陀螺的输出信号有更大的噪声,提取的角速度信息有很大误差。针对这种情况,传统的解决思路是对陀螺系统本身和其误差机理建模分析,并设计相应的降噪算法[1-2]。Koifman等[3]在20世纪90年代提出了利用飞行器动力学模型辅助惯性导航系统工作的方法,并进行了数学仿真验证。这是一种利用载体动力学信息对传感器误差进行修正的新思路。近年来,将这种思路应用于水下航行器和陆地航行器的算法也相应提出[4-5]。对于气动参数等预知信息确定的导弹,可以建立描述其迎角、气动力矩、弹体转动角速度及执行机构信息等物理量之间关系的数学模型。
本文借鉴了利用载体信息的修正测量系统的思想,提出了一种通过弹体动力学模型信息构建卡尔曼滤波器,对飞行过程中的角速度测量值进行快速实时校正的方法。
1动力学滤波模型和滤波器的构建
卡尔曼滤波器的工作原理是通过系统模型估计出当前时刻的状态量,并与实际的测量值来加权修正状态量。因此卡尔曼滤波器效果的优劣将主要取决于对目标内部状态变化规律建模的真实程度。对于一般的近程战术导弹,可以将弹体的姿态运动用刚体绕质心转动的运动方程来描述。
1.1动力学滤波模型
根据弹体动力学方程[6],弹体三通道力矩与弹体三轴角速度存在如下关系:
(1)
对于三通道独立的轴对称导弹,在气动布局和外形参数给定的情况下,气动力矩M又可以表示为如下形式:
(2)
通常情况下速率陀螺捷联弹体安装,因此测量得到弹体系下的角速度ωb,根据弹体系和速度系的关系,并且考虑到飞行过程中迎角、侧滑角和滚转角为小量,经推导可以得到关于迎角和侧滑角的姿态动力学方程:
(3)
(4)
式中:a34,a35,b34,b37为动力系数;fα(…),fβ(…)为推导过程中由于模型简化而导致的误差量。
系统方程式(1)、式(3)和式(4)是一组非线性微分方程,因此无法使用标准卡尔曼滤波器进行滤波。为此,本文采用了扩展卡尔曼滤波(EKF)。该算法的思路是先进行模型的局部线性化近似,再利用关于线性系统的卡尔曼滤波方法对非线性系统进行滤波。EKF具有算法简单、计算量小等优点,是目前工程上应用最广泛的一种高斯非线性滤波算法。
1.2扩展卡尔曼滤波器
根据上文建立的弹体动力学模型,选取滤波系统状态变量为:
式中:Mx0,My0,Mz0为由导弹气动外形不对称和制造误差产生的力矩,不会随着飞行状态变化而改变,故希望可以通过滤波器对其进行估计。



(5)
其中:
式中:wωx,wωy,wωz为系统关于角速度方程建模的误差量,主要由mz(…)等忽略的小力矩项和拟合的气动力矩参数与真实飞行过程中的偏差造成,这里将其作为白噪声处理;wα,wβ分别为系统关于迎角和侧滑角方程建模的误差量,主要由fα(…),fβ(…)等在模型推导过程中进行简化导致的偏差以及气动力偏差造成,在模型中同样作为白噪声处理。

(6)
其中:
(7)
将原状态方程(5)转变为:

(8)

(9)
其中:
式中:V(k)为角速度的测量噪声。则原系统在滤波状态值处线性化为式(8)和式(9)的形式,这时即可以用标准卡尔曼滤波方程进行滤波计算。
2系统可观测性分析
对于线性系统的可观测性分析方法很多,如奇异值分解法、分段定常理论(PWCS)等。而对于非线性系统的可观测性分析,现有的方法主要分为两类:一类是将非线性系统化为线性系统后,再利用线性系统可观测性分析方法;另一类是利用非线性系统的局部可观测性理论[7-9]。本文采用局部可观测性理论对滤波系统进行分析。
2.1局部可观测性判据
考虑如下非线性系统:

(10)
式中:X∈Rn为系统的n维状态向量;Z∈Rm为系统的m维观测量;f(X),h(X)分别为系统的状态方程和观测方程。
非线性系统的可观测性理论基于如下定义:
h沿f的各阶李导数为:
(11)
式中:k=1,2,…,n-1。同时定义:
(12)
记系统∑的观测矩阵为:
(13)
如果rank(Q(X0))=n,那么称系统在X0点满足可观测性秩条件。
引理1:如果系统∑在X0点满足可观测性秩条件,那么系统在X0点局部弱可观。
引理2:如果系统∑在定义区间内的每个点X满足可观测性秩条件,那么系统局部弱可观测。
下面利用可观测性秩判据分析滤波系统的可观测性。
2.2局部可观测性分析
对于轴对称导弹,y轴转动惯量与z轴转动惯量几乎相等,即Jy-Jz≈0;并且导弹对于x轴的转动惯量Jx≪Jy,Jz,即(Jy-Jx)/Jz≈1。
基于上述假设,对推导过程进行简化,去除影响较小的项,得观测方程系统的李导数为:
(14)
其中:
则得系统的观测矩阵为:
(15)

3半实物仿真分析
为了进一步验证弹体动力学信息滤波算法的有效性,利用某短程制导导弹半实物仿真样机进行仿真试验。动力学参数采用弹体真实参数:质量m=9.5kg,参考长度L=1.2m,参考面积S=0.013 3m2;转动惯量为Ix=0.038kg·m2,Iy=0.881kg·m2,Iz=0.882kg·m2;初始飞行速度Ma=0.7。
试验弹道采用程控弹道,通过转台模拟飞行器做绕三轴摆动的飞行动作。滤波系统通过弹上计算机对速率陀螺数据进行实时修正。仿真结果如图1~图4所示,陀螺测量值误差和滤波误差的均值和均方差统计如表1所示。
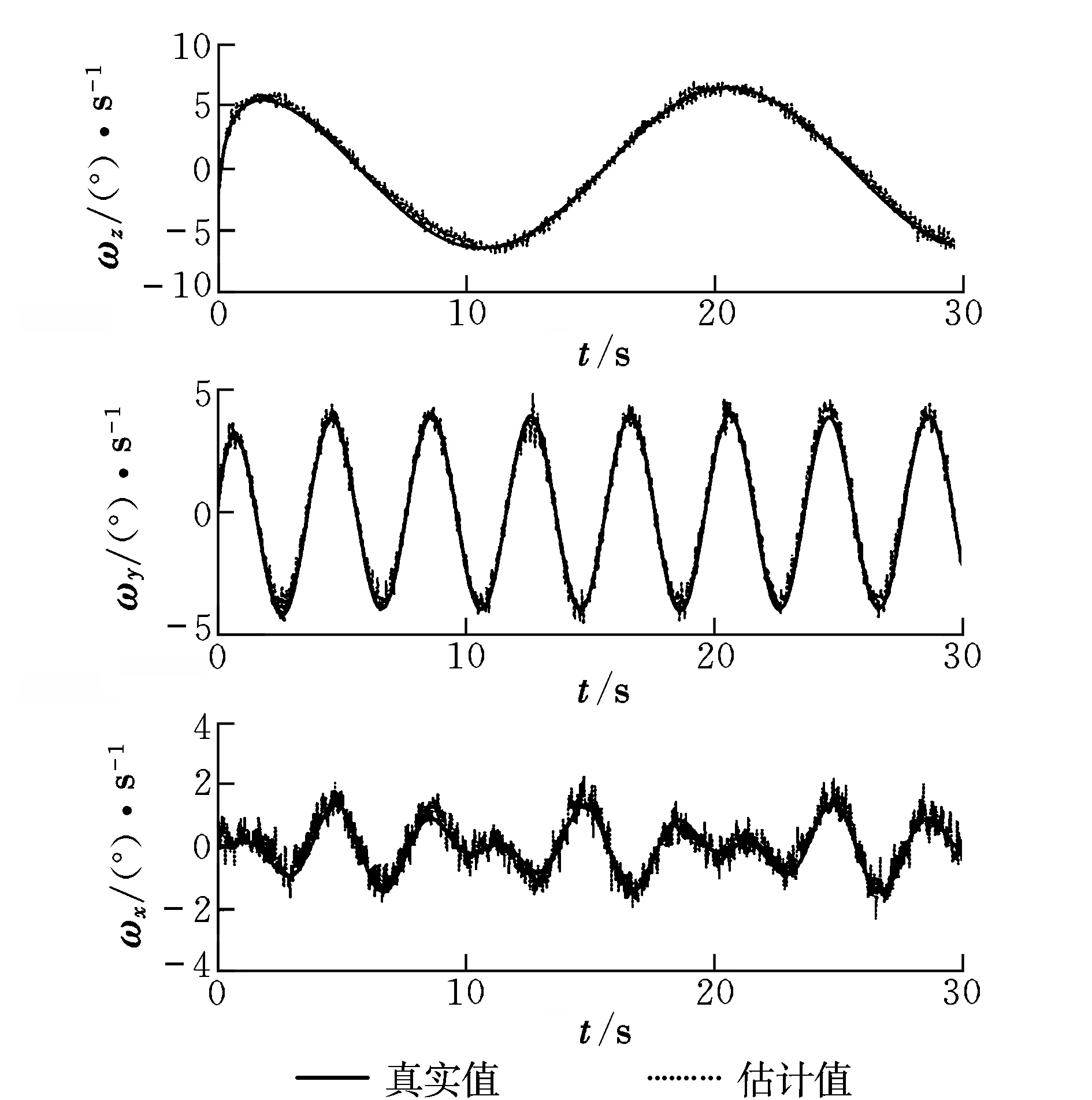
图1 角速度真实值和滤波估计值Fig.1 Truth value and estimated value of angular rate
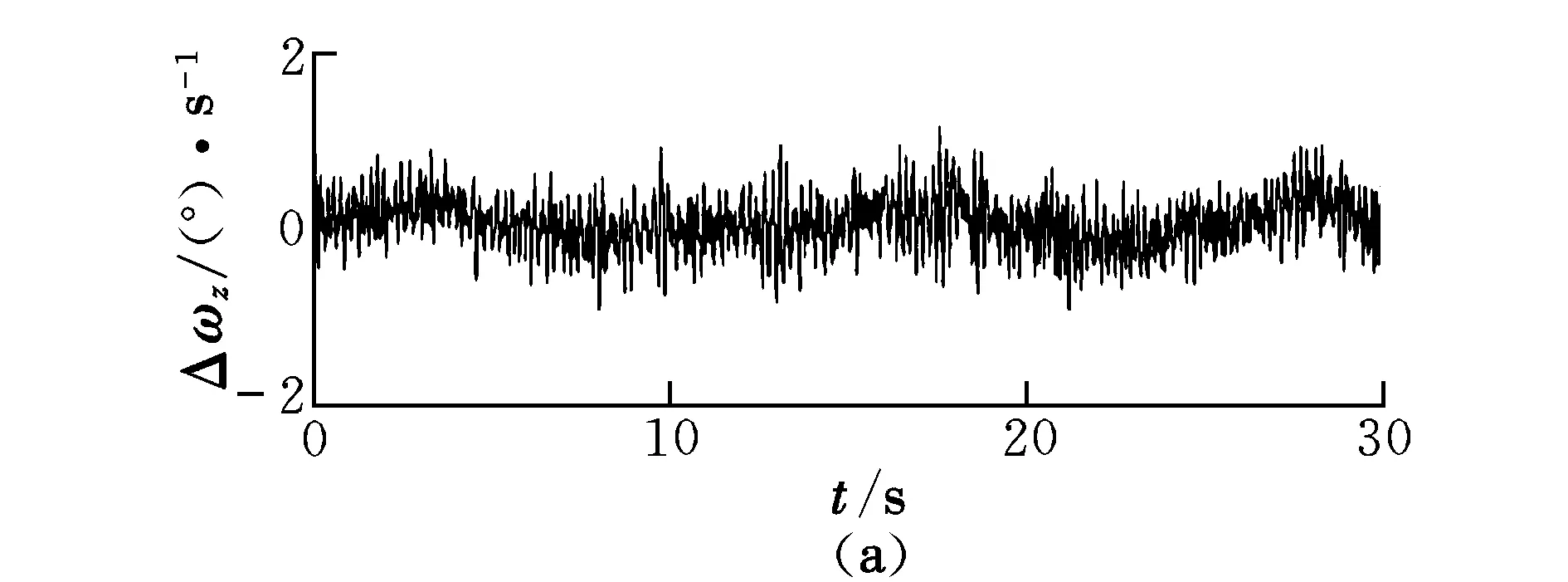
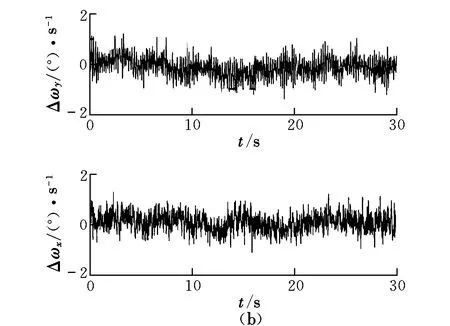
图2 角速度滤波误差Fig.2 Filtering error of angular rate
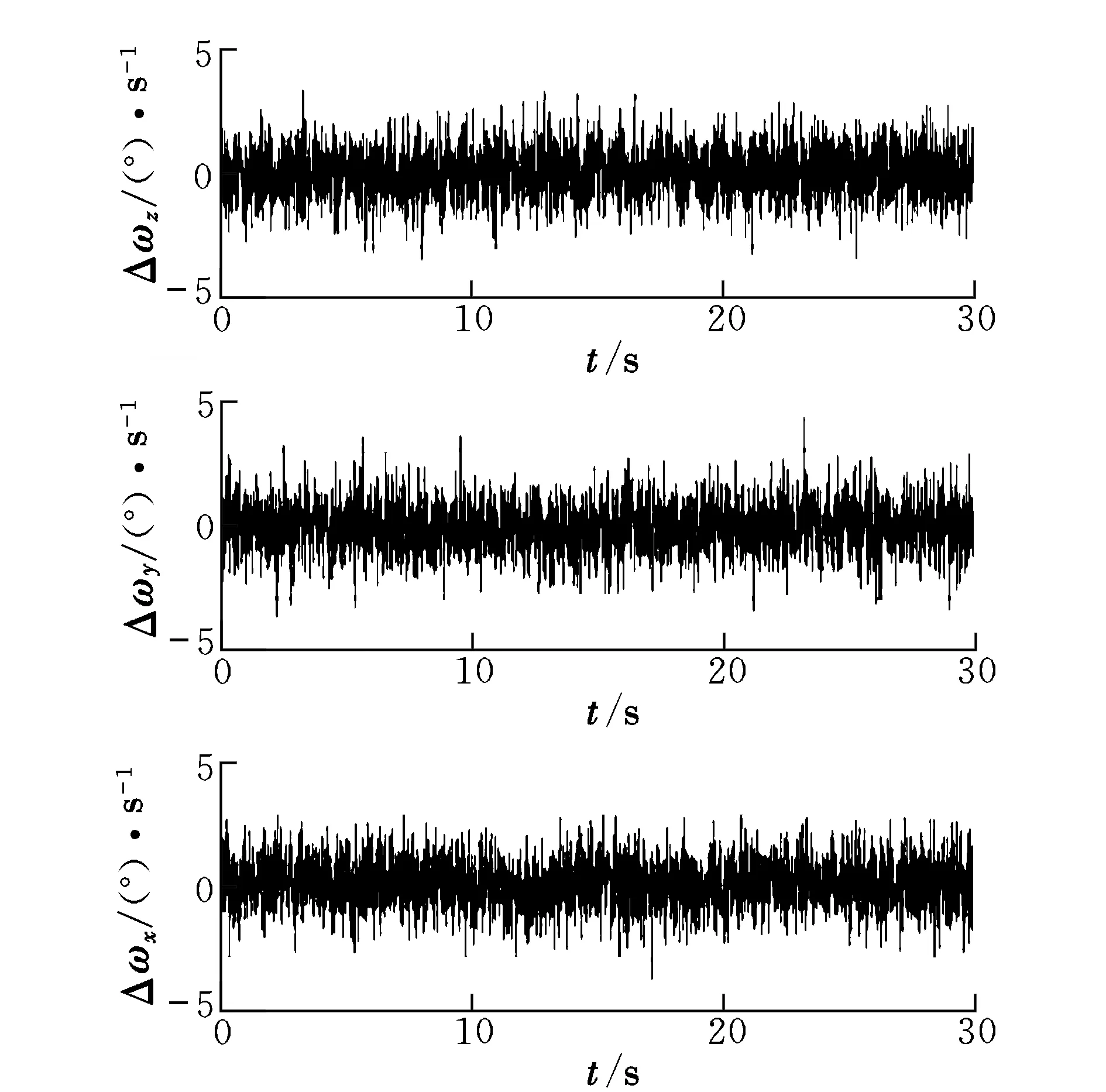
图3 角速度测量误差Fig.3 Measurement error of angular rate
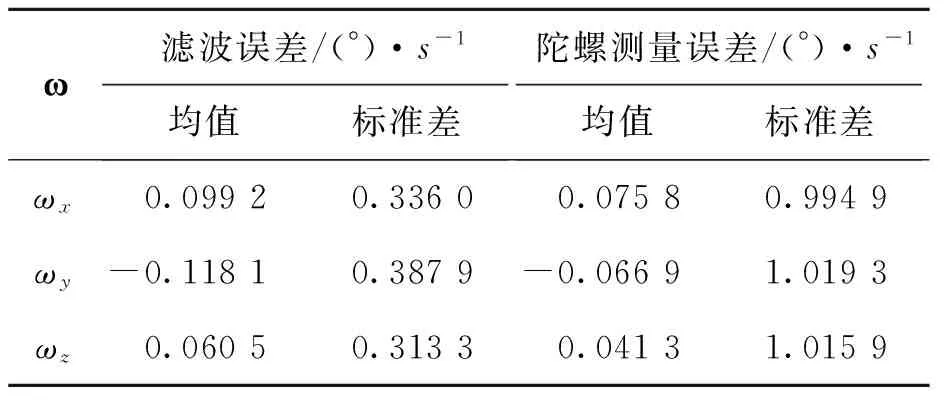
ω滤波误差/(°)·s-1均值标准差陀螺测量误差/(°)·s-1均值标准差ωx0.09920.33600.07580.9949ωy-0.1181 0.3879-0.0669 1.0193ωz0.06050.31330.04131.0159
由图1可以看出,滤波估计值可以准确地跟踪真实状态。从图2~图3和表1可以看出,应用动力学辅助滤波后,三轴角速度的误差均方差减小到原始测量误差均方差的30%左右,误差均值略有增大。这表明引入动力学滤波系统后对陀螺的噪声产生了明显的抑制效果。
从图4中可以看出,滤波过程中迎角和侧滑角的估计误差非常小,则该滤波器同样可以用来估计迎角和侧滑角。
4结束语
针对低精度的速率陀螺,本文设计了一种通过使用弹体姿态动力学模型和非线性滤波卡尔曼滤波器对陀螺数据进行修正的方法。通过半实物仿真测试表明,该方法可以非常有效地减小陀螺的高频测量噪声,具有一定的工程应用价值。基于动力学信息的卡尔曼滤波器在一定程度上可以看成是时间常数自适应调节的低通滤波器,相比于传统的一阶低通滤波器,具有相位延迟小的明显优势。
参考文献:
[1]蒙涛,王昊,李辉,等.MEMS陀螺误差建模与滤波方法
[J].系统工程与电子技术,2009,31(8):1944-1948.
[2]李杰,曲云,刘俊,等.模平方小波阈值在MEMS陀螺信号降噪中的应用[J].中国惯性技术学报,2008,16(2):236-239.
[3]KoifmanM,BarItzhackIY.Inertialnavigationsystemaidedbyaircraftdynamics[J].IEEETransactionsonControlSystemsTechnology,1999,7(4):487-493.
[4]MorgadoM,OliveiraP,SilvestreC,etal.EmbeddedvehicledynamicsaidingforUSBL/INSunderwaternavigationsystem[J].IEEETransactionsonControlSystemsTechnology,2014,22(1):322-330.
[5]WangJH,GaoY.Landvehicledynamics-aidedinertialnavigation[J].IEEETransactionsonAerospaceandElectronicSystems,2010,46(4):1638-1652.
[6]李新国,方群.有翼导弹飞行动力学[M].西安:西北工业大学出版社,2008:9-18.
[7]HermannR,KrenerAJ.Nonlinearcontrolabilityandobservability[J].IEEETransactionsonAutomaticControl,1977,22(5):728-740.
[8]常晓华,崔平远,崔祜涛.一种深空自主导航系统可观测性分析方法[J].哈尔滨工业大学学报,2010,42(11):1681-1685.
[9]PereraLDL,MelkumyanA,NettletonE.OnthelinearandnonlinearobservabilityanalysisoftheSLAMproblem[C]//IEEEInternationalConferenceonMechatronics.Malaga,Spain:IEEE,2009:279-284.
(编辑:李怡)
Filtering of rate gyroscope based on missile dynamics information
CHEN Hong-ying1, LUO Wen-tian2
(1.Flight Technology College, CAFUC, Guanghan 618307, China;2.Aeronautical Engineering College, CAFUC, Guanghan 618307, China)
Abstract:For the low accuracy and high noise problem of the rate gyroscope of tactical guidance weapon’s using the low precision inertial component, a denoising method based on missile dynamics information was presented. The method combined missile attitude dynamics equation with extended Kalman filter algorithm to build the filter. The gyroscope’s output were corrected in real-time by the data of prior information of missile and measured information of actuator during flight. The nonlinear filtering system is proved to be local observable and efficient. Simulation results show that the method could reduce the measure error of the rate gyroscope effectively.
Key words:rate gyroscope;missile dynamics;extended Kalman filter;local observables;semi-physical simulation
收稿日期:2015-11-11;
修订日期:2016-01-15; 网络出版时间:2016-02-29 16:37
作者简介:陈红英(1976-),女,四川德阳人,副教授,研究方向为飞行力学与飞行仿真。
中图分类号:TJ765
文献标识码:A
文章编号:1002-0853(2016)03-0053-05