基于LQR的纵向多自由度变稳控制律设计
2016-07-01 01:10丁团结
飞行力学 2016年3期
关键词:最优控制
丁团结
(中航工业飞行仿真航空科技重点实验室, 陕西 西安 710089)
基于LQR的纵向多自由度变稳控制律设计
丁团结
(中航工业飞行仿真航空科技重点实验室, 陕西 西安 710089)
摘要:飞机进场着陆过程中,速度、迎角和俯仰角速度等多参数的跟踪模拟是一个复杂的多输入输出系统,采用传统的控制方法难以获得满意的控制效果。根据系统控制要求,提出一种利用最优二次型调节器(LQR)的控制方式。首先分析跟踪模拟的结构形式,把模型跟踪问题化为最优二次型状态调节器,确定控制律的基本结构;然后对某型飞机进场着陆阶段特性利用TIFS飞机进行模型跟踪控制律的设计,并结合经典控制理论对系统控制参数进行修正;最后利用舵机在回路的半物理试验台进行仿真。结果表明,所提出的LQR控制方法能够有效地解决多控制回路性能的自动协调,具有良好的动态响应,而且有很高的模型跟踪模拟精度。
关键词:变稳飞机; 模型跟踪; 最优控制; 多自由度
0引言
空中飞行模拟器又称变稳飞机,它能够通过变稳电传系统和可变人感系统改变本机动力学特性、稳定性和操纵性。目前我国仅有的变稳飞机IFSTA能够进行三轴角速度的模拟,若要进行进场着陆阶段的精确模拟,还需要精确跟踪速度、迎角和航迹角信号,对多个操纵舵面进行控制,控制系统成为了运动模态耦合较强的多输入、多输出系统[1]。在多变量反馈控制系统设计方法中,最优二次型LQR已被应用于现代飞行控制系统的设计,并取得了一定的成功经验。20世纪70年代,波音767侧向自驾仪采用最优二次型方法解决了经典单回路设计无法解决的问题[2]。先进技术验证机X-29,X-31采用最优控制方法设计电传飞行控制系统,获得了满意的飞行品质[3-4]。在解决多回路控制问题时,最优控制设计技术比经典设计方法有较大的优越性。本文针对进场着陆阶段多参数的空中飞行模拟,根据显式模型跟踪的LQR控制理论和设计思想,对进场着陆阶段跟踪模拟的控制律进行了设计。
1控制律设计原理
对于给定的连续性系统,若取状态变量和控制变量的二次型函数的积分作为性能指标函数,则这种动态系统最优问题变为线性系统性能指标的最优控制问题。由于线性二次型问题的最优解可以写成统一的解析表达式并实现求解过程的规范化,可导致一个简单的线性状态反馈控制律,从而构成闭环最优反馈控制[5]。
模型跟踪是本体飞机通过相应的控制系统来跟随模型飞机的输出,达到对模型飞机验证的目的。假设本体飞机的运动方程描述为:

(1)
而期望的模型飞机运动方程为:
(2)
根据模型跟踪的基本原理,控制律设计的目标是求得相应的控制量u,使得本机与被模拟飞机具备相同的响应特性。模型跟踪控制律就是对控制向量u进行约束,设法寻找一个控制向量使误差e最小,控制向量为飞机的控制舵面。图1为基于LQR的显式模型跟踪原理框图。
根据LQR的基本原理,用泛函数表示跟踪控制律性能指标为:
(3)
式中:积分项eTQedt反映了系统控制过程中跟踪参数动态跟踪误差的累积,权矩阵Q能给不同时刻的误差赋予不同的加权,该项反映了系统的控制效果;积分项uTRudt中的R能给不同时刻的控制分量赋予不同的加权。二次型指标式极小即在模型跟踪过程中使跟踪参数动态跟踪误差、控制能量消耗综合最优。
为了保证模型跟踪的精度,使系统的跟踪误差e趋近于0,对图1中的控制过程进行整理,化为最优二次型调节器的基本问题,再利用式(3)求得最优控制律的前馈和反馈矩阵。首先把模型飞机和驾驶员指令合成为一个增广系统:
(4)
其中:
把式(1)和式(4)进行合并,求得增广调节器的状态方程为:

(5)
其中:
这样显式模型跟踪问题就进一步转化为LQR的调节器问题。根据式(3)可得此时系统的性能指标为:

(6)
得到增广系统的最优控制为:
(7)
通过Riccati方程分别解出K1,K2,K3。
由以上分析可知,通过变换增广矩阵,最优控制由本机的状态反馈以及模型飞机和指令发生器的状态前馈构成,状态反馈K1只和本体飞机特性有关,不涉及模型飞机和指令发生器的特性,状态前馈K2,K3不但与模型飞机特性有关,而且还和被跟踪的模型飞机输出参数有关,根据实际的飞机状态及跟踪的参数选择适当的Q,R权阵,从而得到满意的效果。飞机模型跟踪系统最优控制律结构如图2所示。
2控制律设计方法
2.1控制律设计
考虑到工程要求和飞行控制系统设计经验,利用常规LQR方法设计飞行控制系统时采用简化系统模型。最优设计的原始飞机模型将采用低阶模型,包括飞机的速度、迎角、俯仰角和俯仰角速度等主要动特性,将飞机的其他高阶模态特性截断。
利用文献[6]提供的TIFS飞机纵向动力学模型作为平台来进行控制律设计。其状态空间形式为:

(8)
其中:

式中:δe为升降舵偏角;δl为直接升力舵面偏角;δT为自动油门位置;C为选择输出矩阵。
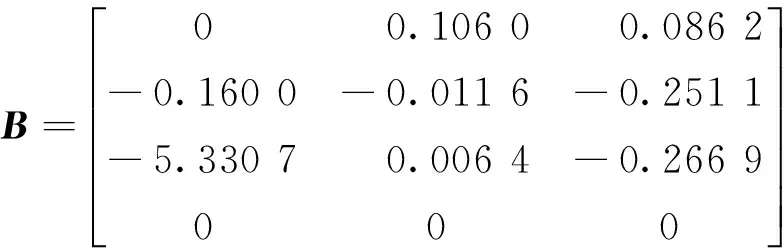
选择某典型电传飞机作为模型飞机对象,选取的模拟状态点为H=500 m,Ma=0.3。根据以上分析,对模型和系统进行处理,利用式(4)和式(5)把系统化为增广矩阵,并根据LQR原理,选取Q,R作为加权矩阵,由Riccati方程解算控制律的前馈和反馈值。增益矩阵为:


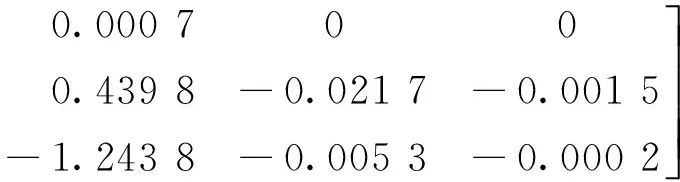
矩阵K的三行增益分别对应图2中的K3,K2和K1,通过模型飞机和驾驶指令的全状态前馈和本机的全状态反馈控制油门杆、直接升力面和升降舵偏度,实现对模型飞机的精确模拟。
2.2加权矩阵的选择
在最优控制律设计时,设计参数的选取对控制增益有直接的影响,从而影响模型跟踪的精度,对于加权矩阵Q,R的选择随意性较大,选取有一定的难度,通常选择R为单位矩阵,通过加权矩阵Q控制模型跟踪的精度,选择如下形式的Q阵:
Q=diag[q0q1q20]
式中:q0,q1,q2为加权系数。通过q1和q2对α和q进行加权,获得良好的短周期跟踪特性;通过q0对速度加权,从而得到良好的长周期跟踪特性;飞机的俯仰角与q为积分的关系,故不进行加权计算。
单独进行α或q加权时,在纵向阶跃输入下对模型跟踪精度的影响如图3所示。图4为耦合现象曲线。如果对两个控制参数同时进行加权时,升降舵和襟翼都会影响α和q的跟踪精度,由图4可知有比较严重的耦合现象。为了保证两个参数同时具有良好的跟踪精度,需要对控制律的增益作进一步的调整。根据工程经验,采用与经典控制理论相结合的方法,对关键参数进行调整,调整后的控制参数为:K(2,2)=-0.498 5;K(2,9)=-0.026 0;K(3,2)=-10.833 5。
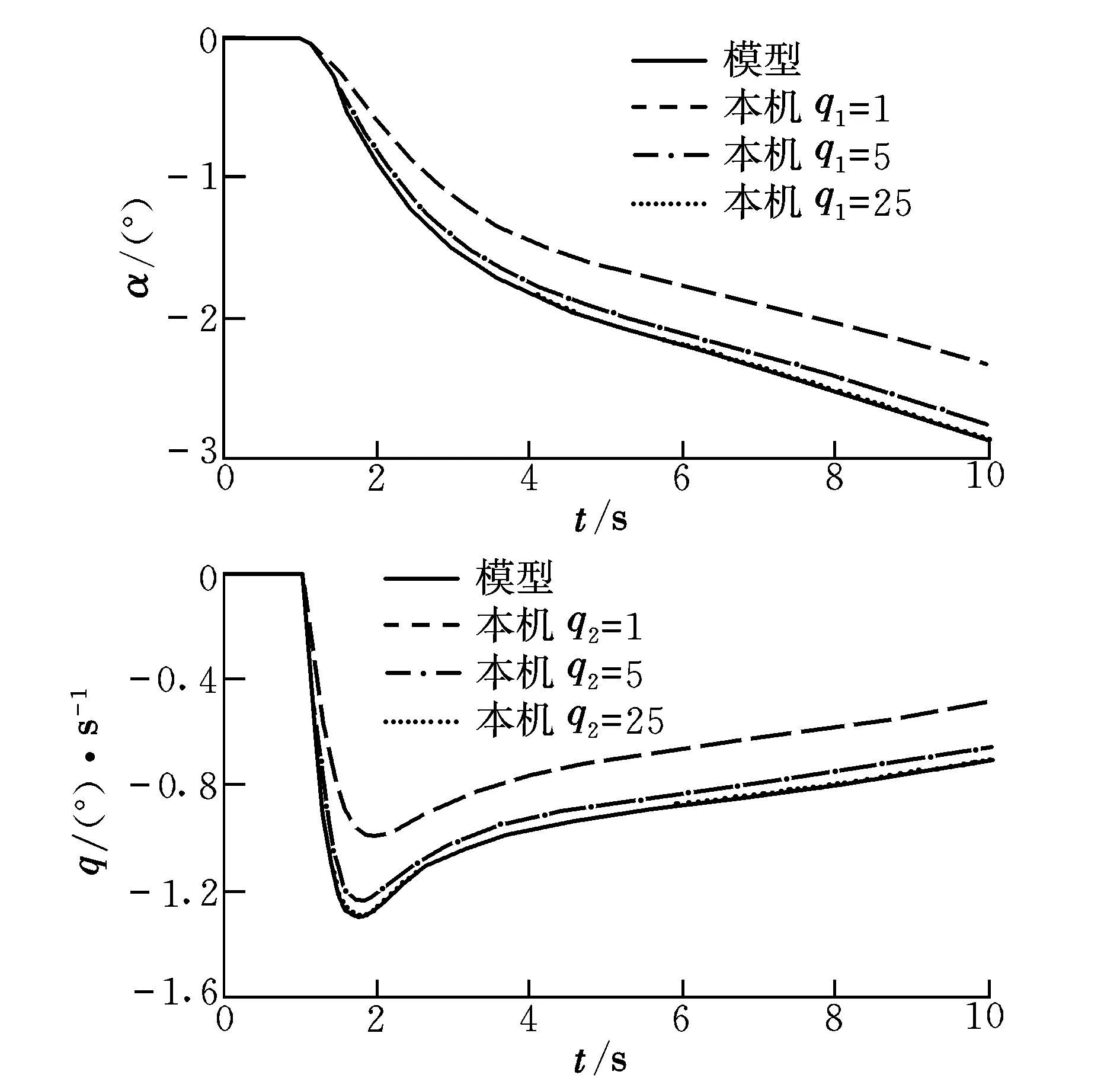
图3 加权矩阵的影响Fig.3 Influence of weighing matrix
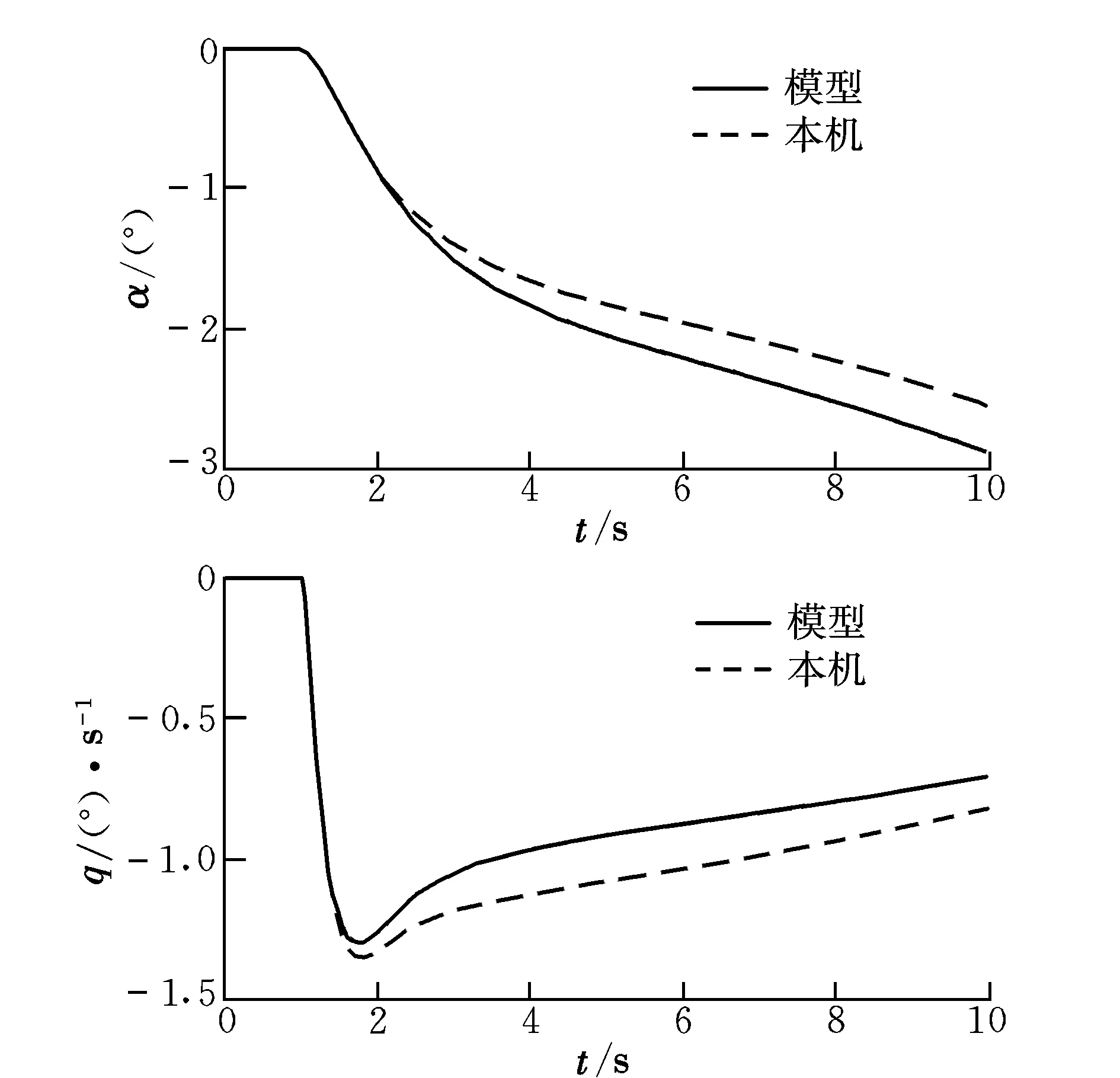
图4 耦合现象(q1=q2=25)Fig.4 Coupling phenomenon(q1=q2=25)
3半物理仿真
真实的飞机包含舵机、非线性、死区等环节,是一个复杂的高阶系统。考虑到最优设计时简化的数学模型不准确,最优控制律系统实际的性能会有所下降,所以在线性模型设计的基础上,利用飞机的全量数学模型进行半物理的仿真试验,以检查非线性对系统特性的影响,并且进一步修正控制律的增益矩阵。半物理试验台环境包含有真实的舵机和数字式可变人感系统,同时采用电动加载系统模拟作用在舵机上的气动力和铰链力矩。
试验内容包括稳定裕度测试和进场着陆模拟。稳定裕度测试即在舵机输入前加入正弦扫频激励信号[7],纵向扫频信号参数如下:频率范围为0.1~3.0 Hz;信号幅值为±3°;扫频时间为30 s。因为在设计控制律时采用飞机的简化模型,飞机的响应特性往往会偏离飞机本体的模态特性。分析可知,系统的相位稳定裕度为39.7°,为了提高系统的稳定裕度,采用经典控制理论,加入超前校正环节提高系统的相位裕度,加入校正环后,系统的相位裕度可增加到56.8°,满足飞控系统设计中相位裕度不小于45°的要求。
在进场着陆模拟的闭环任务中,飞机操稳特性和跟踪效果如图5所示,其中de为纵向操纵位移。由图5可知,在整个模拟过程中,该控制律无论是动态响应还是幅值都有很高的跟踪精度,本机和模型飞机相似度比较高,跟踪误差在5%以内,很好地完成了模型飞机的精确模拟。
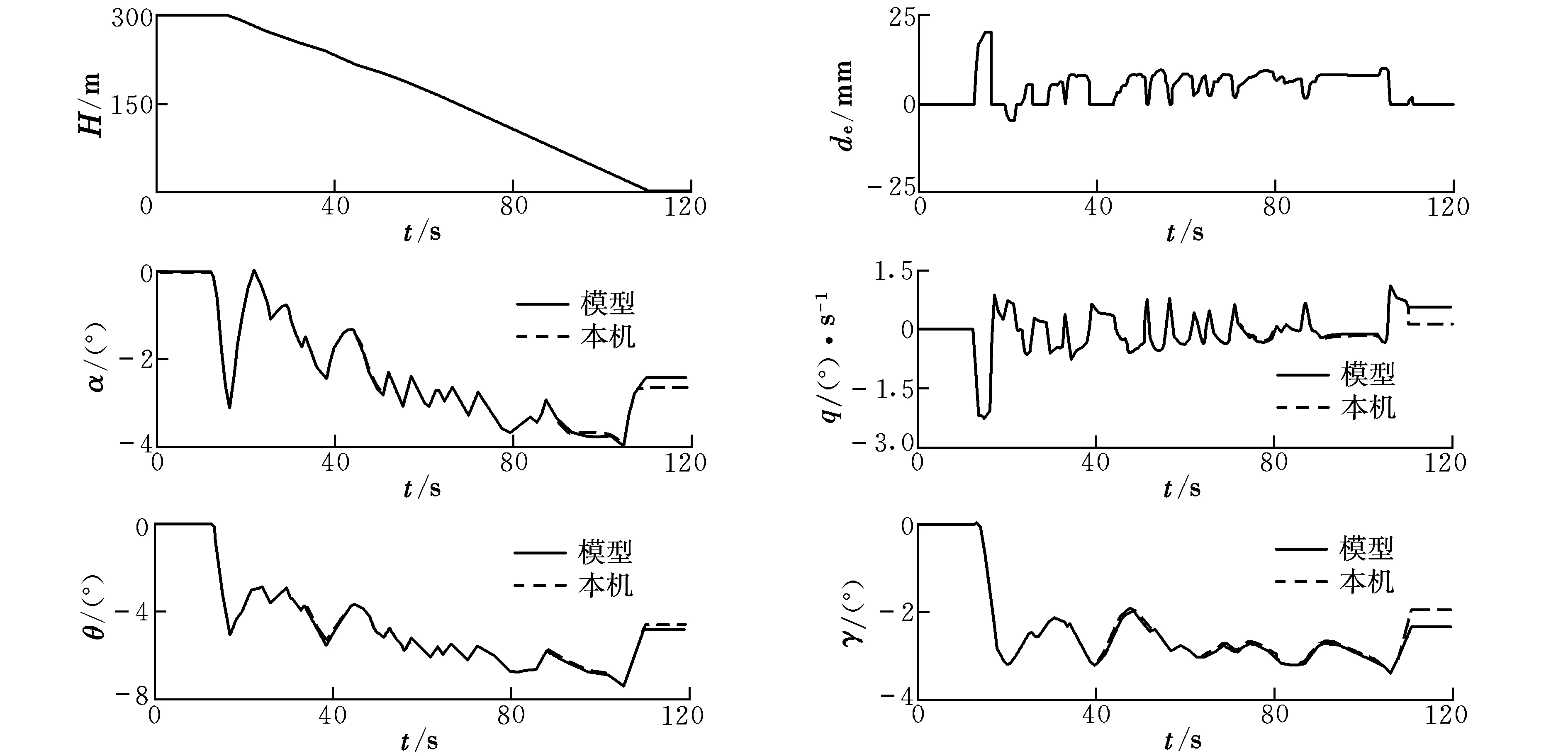
图5 进场着陆模拟试验结果Fig.5 The simulation test results of the landing process
4结束语
本文利用LQR控制理论和模型跟踪的控制方法,设计了多自由度的变稳控制律,很好地解决了多变量控制的耦合问题,在调参的过程中采用与经典控制理论相结合的方法,能够提高控制律设计效率,并且有效改善了系统的稳定性。通过半物理试验台仿真验证可知,在进场着陆阶段对速度、迎角、俯仰角速度同时跟踪模拟的多回路控制中,该控制律具有良好的跟踪效果。这项研究为多自由度变稳飞机提供了一种具有工程价值的设计方法。
参考文献:
[1]刘兴堂,吕杰,周自全.空中飞行模拟器[M].北京:国防工业出版社,2003:34-59.
[2]Steven B L,Lewis F L.Improvement of the 767 lateral autopilot using optimal control design[R].AIAA-84-1956,1984.
[3]Chin J,Breman H. X-29 flight control system design experience[R].AIAA-82-1538,1982.
[4]郭锁凤,申功璋,吴成富.先进飞行控制系统[M].北京:国防工业出版社,2003:1-32.
[5]李国勇.最优控制理论及参数优化[M].北京:国防工 业出版社,2006:163-184.
[6]George C,Nield IV.A model-following technique for insensitive aircraft control systems[R].ADA-106742,1963.
[7]Webster F,Smith T D.Flying qualities flight testing of digital flight control systems[R].RTO-AG-300-V21,2001.
(编辑:方春玲)
Design of control law for longitudinal multi-degrees of freedom variable stability based on LQR
DING Tuan-jie
(AVIC Aeronautical Science and Technology Key Laboratory of Flight Simulation,Xi’an 710089, China)
Abstract:The tracing simulation of velocity, angle of attack and pitch angle rate is a complex, multi-input and multi output control system during approach and landing stage, while it is difficult to obtain the satisfactory feedback with the traditional control method. According to the requirements for system control, the control mode based on Linear Quadratic Regulator (LQR) was proposed in this paper. Firstly, the structural form of tracing simulation was analyzed and the problem of model-following was transferred to linear quadratic regulating, so the basic structure of control law was determined. Then combining one actual flight test airplane, the Total In-Flight Simulator (TIFS) was applied to design the control law for approach and landing stage, and the control parameter was modified based on classic control theory. Finally, the simulation was studied by steering engine in semi-physical test-bed environment with loop, and the results have shown that the control method in this paper can solve the automatic coordination of multi-loop control performance efficiently with good dynamic feedback and high accuracy for simulation.
Key words:variable stability airplane; model-following; optimal control; multi-degrees of freedom
收稿日期:2016-01-08;
修订日期:2016-03-23; 网络出版时间:2016-03-24 14:02
作者简介:丁团结(1979-),男,河南新蔡人,高级工程师,硕士,研究方向为飞行仿真与飞行控制。
中图分类号:V249.1
文献标识码:A
文章编号:1002-0853(2016)03-0086-04
猜你喜欢
数学物理学报(2022年4期)2022-08-22
北京航空航天大学学报(2021年6期)2021-07-20
数学年刊A辑(中文版)(2021年1期)2021-06-09
应用数学(2020年2期)2020-06-24
数学物理学报(2019年3期)2019-07-23
数学年刊A辑(中文版)(2018年4期)2019-01-08
测控技术(2018年12期)2018-11-25
数学物理学报(2018年3期)2018-07-17
西南交通大学学报(2016年6期)2016-05-04
通信电源技术(2016年4期)2016-04-04