
真实交通危险工况下驾驶员转向避撞相关因素分析*
2016-07-18 03:07孟琳朱西产孙晓宇李霖江丽君同济大学上海0804上海汽车集团股份有限公司上海0804
汽车技术 2016年6期
孟琳 朱西产 孙晓宇 李霖 江丽君(.同济大学,上海 0804;.上海汽车集团股份有限公司,上海 0804)
真实交通危险工况下驾驶员转向避撞相关因素分析*
孟琳1朱西产1孙晓宇1李霖1江丽君2
(1.同济大学,上海 201804;2.上海汽车集团股份有限公司,上海 201804)
【摘要】通过对上海地区采集到的真实交通工况进行筛选和分类,分析了本车直行与前车冲突及本车直行与骑行人冲突两种危险工况下影响驾驶员转向避撞行为的相关因素,并通过Logistic回归分析建立了可预测驾驶员在危险工况下是否进行转向避撞的模型。利用该模型,可根据环境参数和车辆动力学参数判断驾驶员在危险工况下是否倾向使用转向避撞及其概率。
主题词:汽车交通危险工况转向避撞行为Logistic回归分析
1 前言
先进的驾驶安全辅助系统可以帮助驾驶员及早发现和规避潜在危险,目前已研制出了可辅助驾驶员进行转向避撞的横向驾驶辅助系统,如紧急转向辅助(Emergency Steering Assist,ESA)系统、转向避撞支持(Evasive Steering Support,ESS)系统和预碰撞系统等[1~3]。这些系统的介入必须要在驾驶员有转向意图时才进行转向辅助控制,基于此,分析相关环境参数和运动参数进而对驾驶员的转向行为进行预测,可以为转向避撞系统的介入时机和控制策略提供理论基础。
国外相关研究人员对影响驾驶员转向避撞行为的因素进行了分析,如Lechner和McGehee等人[4,5]的研究结果表明,当TTC(相对距离除以相对速度)值减小时,采用转向回避碰撞的比例增加;Kiefer等人[6]研究结果表明,随车速的升高,通过转向回避碰撞的驾驶员比例升高。但是,这些研究多数是在特定的测试环境中进行的,驾驶员的反映与真实交通环境下有一定差距。此外,国外对驾驶员驾驶行为的研究都集中在车与车冲突及车与行人的冲突上,并没有关于车与骑行者的冲突,而这一工况在中国是非常典型的[7],因此,有必要研究本车与骑行人冲突时驾驶员的转向避撞行为。
本文通过对真实交通工况的采集,选择本车直行与前车冲突及本车直行与骑行人冲突的场景,提取可能对驾驶员转向避撞行为产生影响的因素,利用Logistic逻辑回归分析建立了影响驾驶员转向避撞决策的模型。
2 数据采集
利用配备行车记录仪(VDR)的出租车、私家车及警车采集了上海嘉定区的真实交通场景。如图1所示,除采集道路交通的影像信息外,还利用相关传感器采集车速、纵向加速度和侧向加速度等信息。该VDR在纵向加速度或侧向加速度绝对值大于0.4g时触发,只记录触发前15 s和触发后5 s的数据。
通过VDR共采集了约4 000例触发工况,通过人工筛选去掉没有碰撞危险的工况,最终得到1 200例危险工况和8例事故工况。通过主观评价对1 200例危险工况进行了危险程度分级,共分为危险预兆(0级)、轻微危险(1级)、一般危险(2级)和紧急危险(3级)等4级[8],选取危险度为2级和3级的工况作为分析目标,共计430例。参考美国高速公路安全管理局提出的37类预碰撞场景[9],对所筛选的430例工况的分布情况进行了统计,如图2所示,从中选取发生比例最高的两类危险工况来分析影响驾驶员转向避撞的相关因素。
3 本车直行与骑行人冲突时转向避撞相关因素分析
3.1基本信息统计
在430例危险工况中,有93例样本属于本车直行与骑行人冲突,驾驶员在此危险工况下的避撞行为分布为:69%采取制动,37%采取制动+转向操作。由此可知,在驾驶员进行转向避撞操作时都伴随着制动。在93例危险工况中,无转向空间的有48例,有转向空间的45例,占48.4%,有转向空间时驾驶员的避撞行为分布为:26%有转向空间未转向,74%有转向空间转向。下面针对有转向空间的危险工况来分析影响驾驶员转向避撞的因素。经过筛选,最终选取4类10个参数作为可能的影响因素。4类参数包括环境参数(照明情况、道路特征、路面湿滑情况、车流量)、目标车参数(类型、运动状态、是否有遮挡)、本车参数(车速)、两车相对运动参数(制动开始时刻TTC值、重叠程度)。
在参数提取过程中,由于无法确定危险发生时的准确时刻,但容易从CAN总线数据确定制动开始时刻,因此选取开始制动时的TTC值(称为危险点TTC值)进行后续Logistic回归分析,利用回归分析可以选定重要的参数进入回归模型来预测驾驶员的转向避撞行为。用于Logistic回归分析的参数取值及在45例危险工况中的分布情况如表1所列。表1中,定序尺度(Ordinal)是对事物之间等级差的一种测度;名义尺度(Nominal)是指测度事物之间的类别差[10];照明情况好坏分别表示白天和晴天行车及夜间和阴雨天行车;路口包括十字路口和丁字路口;重叠程度表示本车躲避前车所需的最小横向距离与本车车宽之比;车流量多少的分界标准是VDR触发记录前10 s内驾驶员视野中的运动车辆是否大于10辆。

表1 本车直行与骑行人冲突时用于Logistic回归分析的参数取值及分布情况
3.2多因素Logistic回归分析
文中采用向前条件Logistic回归分析,使所选参数以步进的方式进入回归模型,其进入回归模型的标准是分值统计量的显著水平,从回归模型删除参数的标准是条件参数估计的似然比统计量概率。经过预处理和4步的分析计算后,回归模型对于制动转向避撞动作的预测准确率达到90.5%,对仅制动的预测准确率达到90%,此模型拟合效果较好。最终回归分析进入模型中的参数如表2所列。

表2 本车直行与骑行人冲突时Logistic回归分析最终模型参数
根据表2中显著指标值可知,危险点TTC、道路特征、车流量信息的置信度均达到95%以上,重叠率的置信度也达到90%。因此,可以得到如下预测驾驶员避撞行为的模型:
式中,p1表示驾驶员采取制动转向进行避撞的概率;p2表示驾驶员仅采用制动避撞的概率。
模型变量x1、x2、x3、x4的取值和含义如表3所列。

表3 模型变量取值及含义
4 本车直行与车辆冲突时转向避撞相关因素分析
4.1基本信息统计
在430例危险工况中,共有142例本车直行与车辆冲突的工况,占全部危险工况的33%,驾驶员在此类危险工况下的避撞行为分布为:24.6%采取制动+转向,75%采取制动。由此可知,驾驶员在避撞的过程中均采用了制动的方式。同样选取具有转向空间的77例危险工况进行回归分析,此条件下驾驶员的避撞行为分布为:45%采取制动+转向,55%采取制动。
同样选取4类10个参数作为Logistic回归分析参数,如表4所列。表4中,商用车指在视频中出现的大货车和大客车,两侧插入是指目标车从本车前方左、右两侧横向驶来,两侧侵入是指邻车道车辆变道或偏离本车道对本车造成干扰。其中道路特征和目标车的运动状态是2自由度变量,重叠程度是3自由度变量。
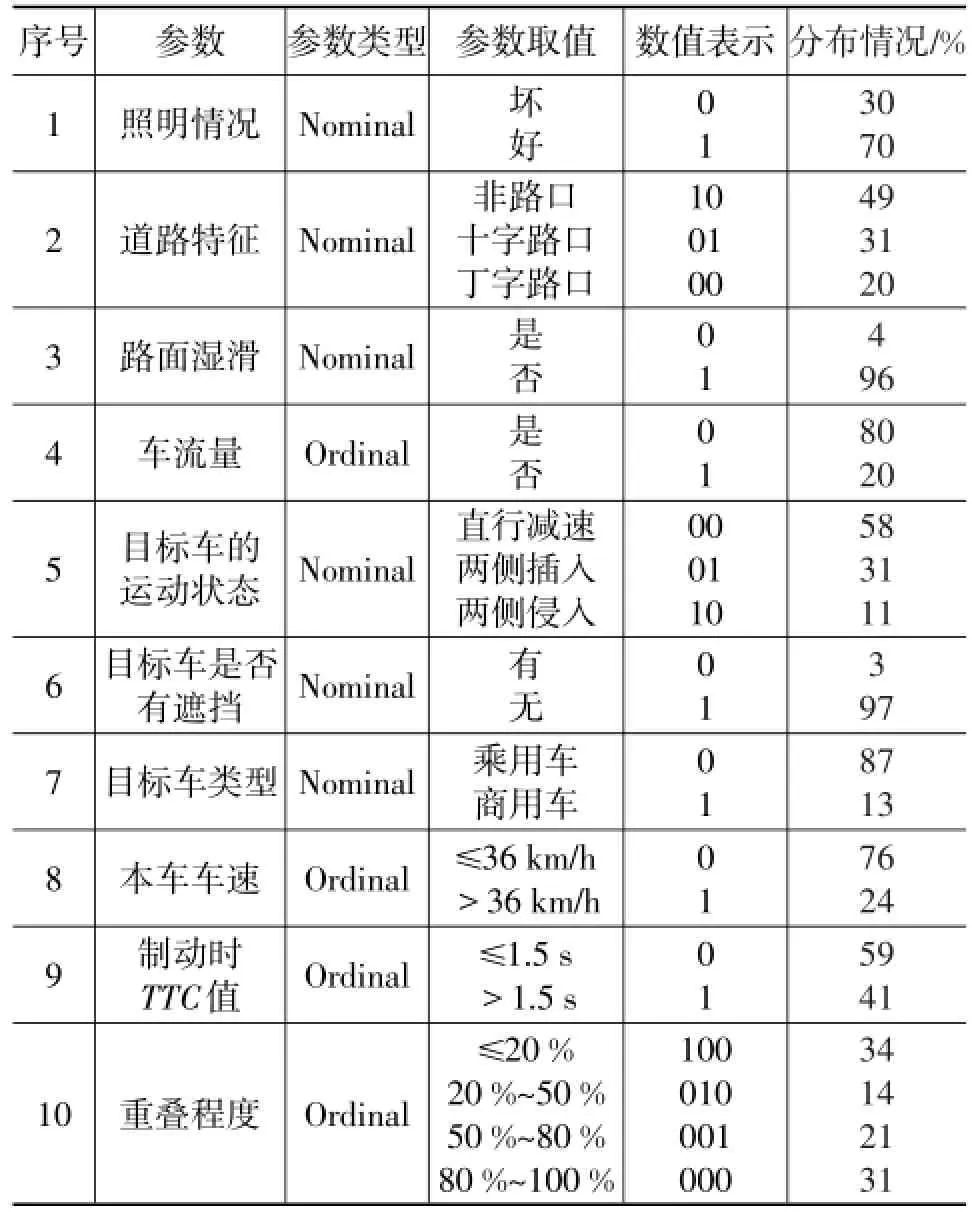
表4 本车直行与车辆冲突时用于Logistic回归分析的参数取值及分布情况
4.2多因素Logistic回归分析
同样采用向前条件Logistic回归分析的方法,经过4步计算以后,最终回归模型对于两种避撞动作预测的准确率均达到88%以上。最终回归模型中的参数如表5所列。
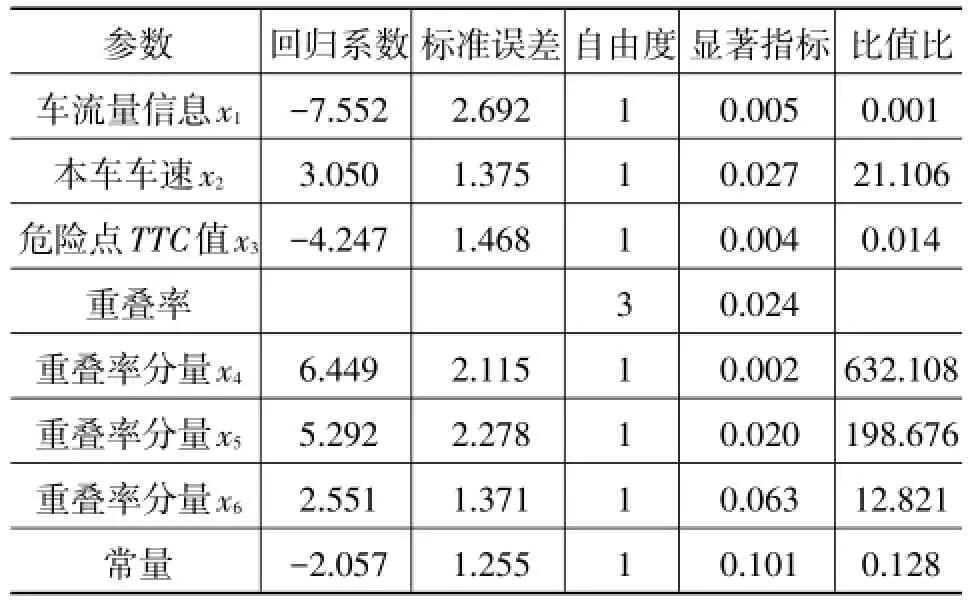
表5 本车直行与车辆冲突时Logistic回归分析最终模型参数
由表5可知,因车流量信息、危险点TTC值、重叠率和本车车速的显著水平明显,所以最终进入回归模型,而其它参数没有进入模型。最终得到的判断驾驶员转向的模型为:
式中,p1为驾驶员采取制动转向进行避撞的概率;p2为驾驶员仅采用制动避撞的概率;x1、x2、x3代表车流量、开始制动时TTC值、本车车速;x4、x5、x6组合表示重叠程度。
模型中各参数取值及含义如表6所列。
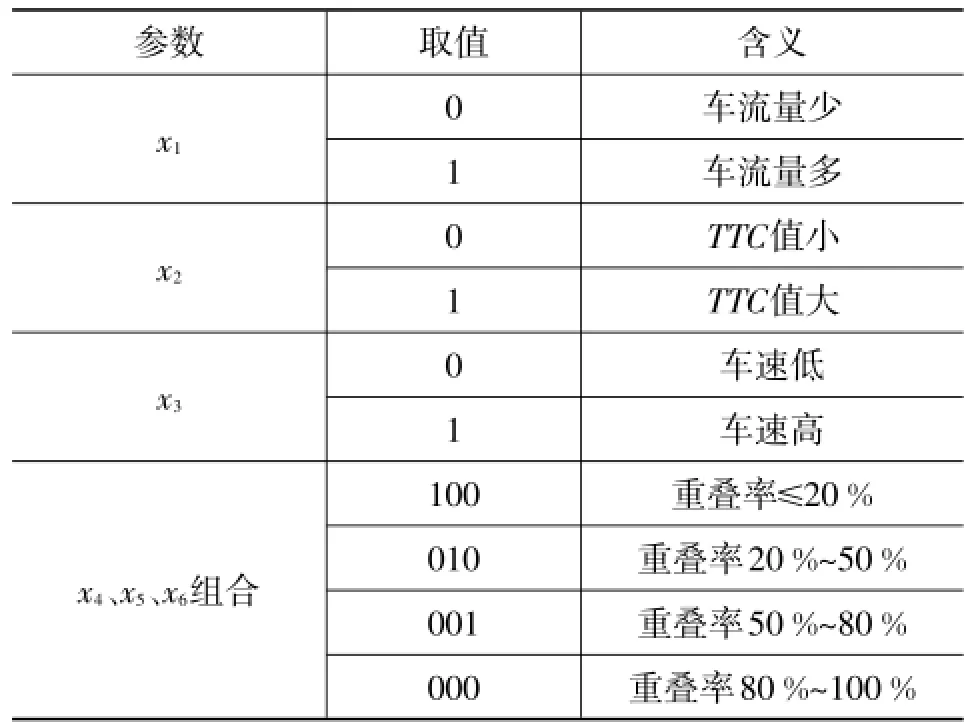
表6 模型参数取值及含义
5 结束语
本文利用真实驾驶危险工况数据分析了影响驾驶员紧急转向避撞的相关因素,主要讨论了本车直行与骑行者和车辆冲突的情况,建立了可以预测驾驶员在危险工况下是否进行转向避撞的模型,利用此模型可根据环境参数和车辆动力学参数判断驾驶员是否倾向使用转向避撞及其概率。在实际应用的过程中,可以通过设定合理的概率阈值来满足系统的误报率、漏报率等要求,当然也需要更为大量的自然驾驶数据验证并提高模型质量。
参考文献
1Eckert A,Hartmann B,Sevenich M,et al.,editors.Emergency steer&brake assist:a systematic approach for system integration of two complementary driver assistance systems. Proc 22nd Int Technical Conf Enhanced Safety of Vehicles,Washington DC,USA;June 2011.
2Fausten M.Accident avoidance by evasive manoevres.Proceedings of the 4th Tagung Sicherheit durch Fahrerassistenz (TVSD,Munich,April 15-16).2010.
3Suzumura M,Fukatani K,Asada H.Current State of and Prospects for the Vehicle Dynamics Integrated Management System(VDIM).Toyota Technical Review.2007,55(222):554-565.
4Lechner D,Malaterre G.Emergency Manuever Experimentation Using a Driving Simulator.SAE Technical Paper,1991.
5McGehee DV,Mazzae EN,Baldwin G,et al.Examination of Drivers′Collision Avoidance Behavior Using Conventional and Antilock Brake Systems on the Iowa Driving Simulator. Human Factors&Vehicle Safety Research.1999:1.
6Kiefer RJ,Cassar MT,Flannagan CA,et al.Forward Collision Warning Requirements Project Final Report-Task 1. Washington DC:National Highway Traffic Safety Administration(NHTSA),2003 DOT HS 809 574.
7中华人民共和国公安部交通管理局.中华人民共和国道路交通事故统计年报2012年度.北京公安部交通管理局2013.
8李霖,朱西产,马志雄.驾驶员在真实交通危险工况中的制动反应时间.汽车工程,2014,36(10):1225~1229.
9Najm WG,Smith JD,Yanagisawa M.Pre-crash scenario typology for crash avoidance research.Washington,DC:National Highway Traffic Safety Administration(NHTSA),2007 DOT HS 810 767.
10李玉光,杜宏巍,黄永生.SPSS 19.0统计分析入门与提高.北京:清华大学出版社,2014.
(责任编辑文楫)
修改稿收到日期为2016年4月5日。
中图分类号:U467.1+4
文献标识码:A
文章编号:1000-3703(2016)06-0059-03
*基金项目:上海市科学技术委员会资助(13QB1402300)。
通讯作者:朱西产(1962-),教授,博士生导师,Email:xczhu@163.com。
Analysis on Factors Affecting Drivers'Steering Evasive Maneuvers in Real Traffic Risk Scenarios
Meng Lin,Zhu Xichan,Sun Xiaoyu,Li Lin,Jiang Lijun
(1.Tongji University,Shanghai 201804;2.Shanghai Automotive Industry Corporation,Shanghai 201804)
【Abstract】The paper analyzes the factors affecting drivers'steering evasive behavior in two risk scenarios in which vehicles going straight forward have conflicts with pedal cyclists or preceding vehicles based on naturalistic driving data in real traffic conditions collected in Shanghai.By using Logistic regression analysis method,the model which can predict whether the driver makes steering evasive maneuver in dangerous conditions is established.With this model,we can determine whether the driver tends to make steering evasive maneuver and its probability in dangerous conditions according to environmental data and vehicle dynamics parameters.
Key words:Vehicle,Risk scenarios,Steering evasive maneuvers,Logistic regression analysis
猜你喜欢
汽车实用技术(2022年14期)2022-07-30
汽车实用技术(2022年7期)2022-04-20
汽车实用技术(2022年4期)2022-03-07
汽车电器(2021年12期)2021-12-30
控制与信息技术(2021年3期)2021-07-22
汽车文摘(2021年4期)2021-04-05
大众汽车(2018年11期)2018-12-26
小小艺术家(2018年1期)2018-06-05
汽车电器(2018年1期)2018-06-05
新少年(2015年6期)2015-06-16
