
基于机载LiDAR数据的断裂构造识别
2016-07-19 03:42马慧慧曾春伟
黑龙江工程学院学报 2016年3期
马慧慧,曾春伟
(1.河南理工大学 测绘与国土信息工程学院,河南 焦作 454003;2.河南理工大学 矿山空间信息技术国家测绘局重点实验室,河南 焦作 454003)
基于机载LiDAR数据的断裂构造识别
马慧慧1,2,曾春伟1,2
(1.河南理工大学 测绘与国土信息工程学院,河南 焦作 454003;2.河南理工大学 矿山空间信息技术国家测绘局重点实验室,河南 焦作 454003)
摘要:断裂构造解译为探测矿藏及其分布提供指引,同时也可以反演相关的地震活动。针对断裂构造实地调查效率低下的缺点,由获取的机载LiDAR点云数据构建DEM,使用DEM晕渲和DEM定向滤波结合的方法研究断裂构造的解译标志和规程,最后通过人机交互解译断裂构造。经与获取的地质资料对比,证明其正确性。试验表明:以机载LiDAR技术为支持,人机交互解译断裂构造是可行的、高效的。
关键词:机载LiDAR;DEM;断裂构造
断裂构造是岩石受地应力作用的产物,也是地壳中各种异常(不连续、突变带)的交汇处[1-3],所以,断裂构造处容易引发地震。同时,由于经受各种理化甚至生物作用,断裂构造是控制矿产分布的主要构造之一,这些区域常常是成矿溶液上升、运移的通道和储矿、储水(地下水)、储油(石油)的场所[4]。故而,断裂构造解译成为地质调查的重要内容。
LiDAR技术是近年来迅速发展并应用的一种三维扫描观测手段。由于激光可以透过植被缝隙到达地表,机载LiDAR系统能够快速地实现对地表地貌形态的精确采集[5-6]。这些数据可以在适当的尺度(m)和精度(dm)上展现断层活动在地表留下的痕迹[7]。国内机载LiDAR技术在断裂构造研究中的应用也已展开。2011年,刘静等[8]对1920年海原M8.5级地震破裂带中的120 km进行了机载LiDAR测量,这是国内机载LiDAR技术在活动构造研究中的首次应用。刘耀辉等[9]利用GPS数据结合地质及地球物理成果对红河断裂带进行反演,利用GPS速度场观测数据和块体模型研究小江断裂带地壳运动特征及地震危险性[10]。本文将以在某矿区获取的LiDAR数据为基础,结合地质钻井资料,讨论断裂构造识别的标志与流程。
1机载LiDAR点云获取与DEM生成
1.1试验区简介
豫北鹤壁某矿及周边区(见图1)属于太行山东麓和华北平原的过渡地带,且因处于暖温带季风气候区,其地貌类型复杂。地质资料显示,豫北地区属太行山山前断裂带,这是一条长期活动的断裂带。其断陷盆地由磁县断裂、汤西断裂、汤东断裂3条主要断裂所控制,且多有交错隐伏次断裂。该区域内主断裂走向北北东或北东。

图1 试验区位置
1.2机载LiDAR点云获取
机载飞行平台集成GPS、IMU/INS、激光测距以及光学成像系统(有的还搭载数据预处理模块,用于数据解算与转换),按照设定的地理间隔,无缝往复飞行采集目标区内数据。点云平均落点密度0.62个/m2。初始点云高程着色如图2所示。

图2 初始点云高程着色
1.3点云滤波与DEM构建
先对获取的机载LiDAR点云数据进行航带拼接,解算点云坐标后,滤波去除噪声(以地面点为信号,则其他为噪声)。之后,作插值运算,构建高精度DEM。机载LiDAR点云的滤波原理可以分为两类[11-13]:第一类是基于高程突变;第二类是基于激光脚点的回波强度信息。当前,基于高程突变的滤波原理应用最为广泛,主要包括基于坡度的滤波算法、基于数学形态学的滤波算法、基于三角网的滤波算法和基于移动窗口的滤波算法等几类。具体要首先滤除粗差点。因这些点在几何关系上与地面点呈明显孤立状,所以,直接设置阈值上下限对它们进行滤除。在扫描区域内地势较为平坦,不会出现剧烈起伏的前提下,过滤掉不属于真实场景(指地面和地物)的异常点云后,再将真实的地面点和地物点进行分离,即可获得地面点点云数据。本文由机载LiDAR点云数据滤波到构建DEM,最终完成断裂构造解译的技术流程,如图3所示。
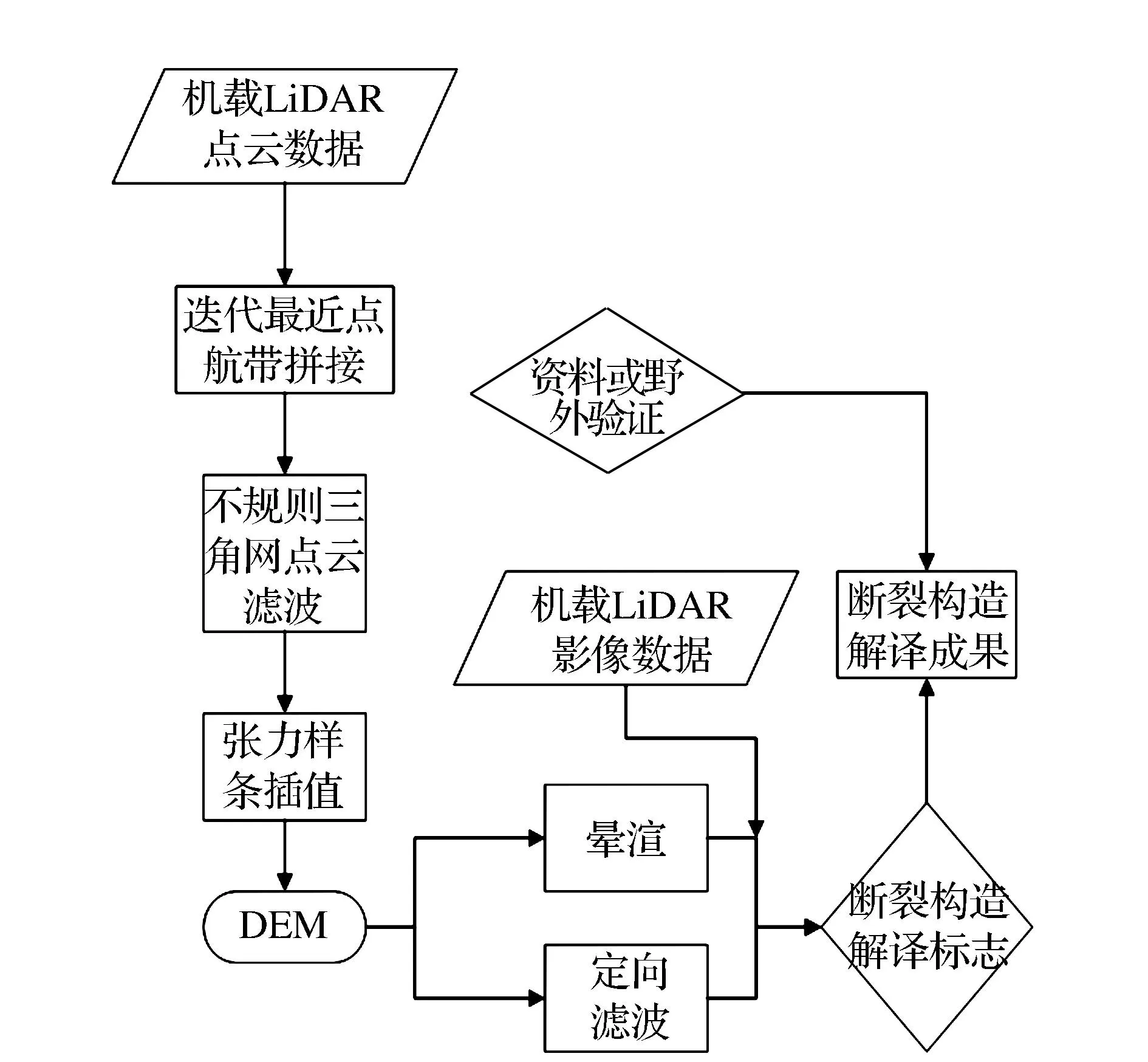
图3 机载LiDAR数据断裂构造解译流程
本文采用基于不规则三角网的滤波算法对点云进行滤波处理,其原理是:选取一定数量地面点组成初始稀疏三角面网,以此为基础,对三角网外各点进行判定,如果待判点到此前构建的三角面的距离及角度小于设定的阈值,则判定该点位为地面点,以此充实加密三角网。然后,以最新的三角网重新计算判定非地面点,再次充实加密三角网,迭代至无新增地面点或者满足设置条件为止。
三角网点位判定示意图如图4所示。

图4 三角网点T判定
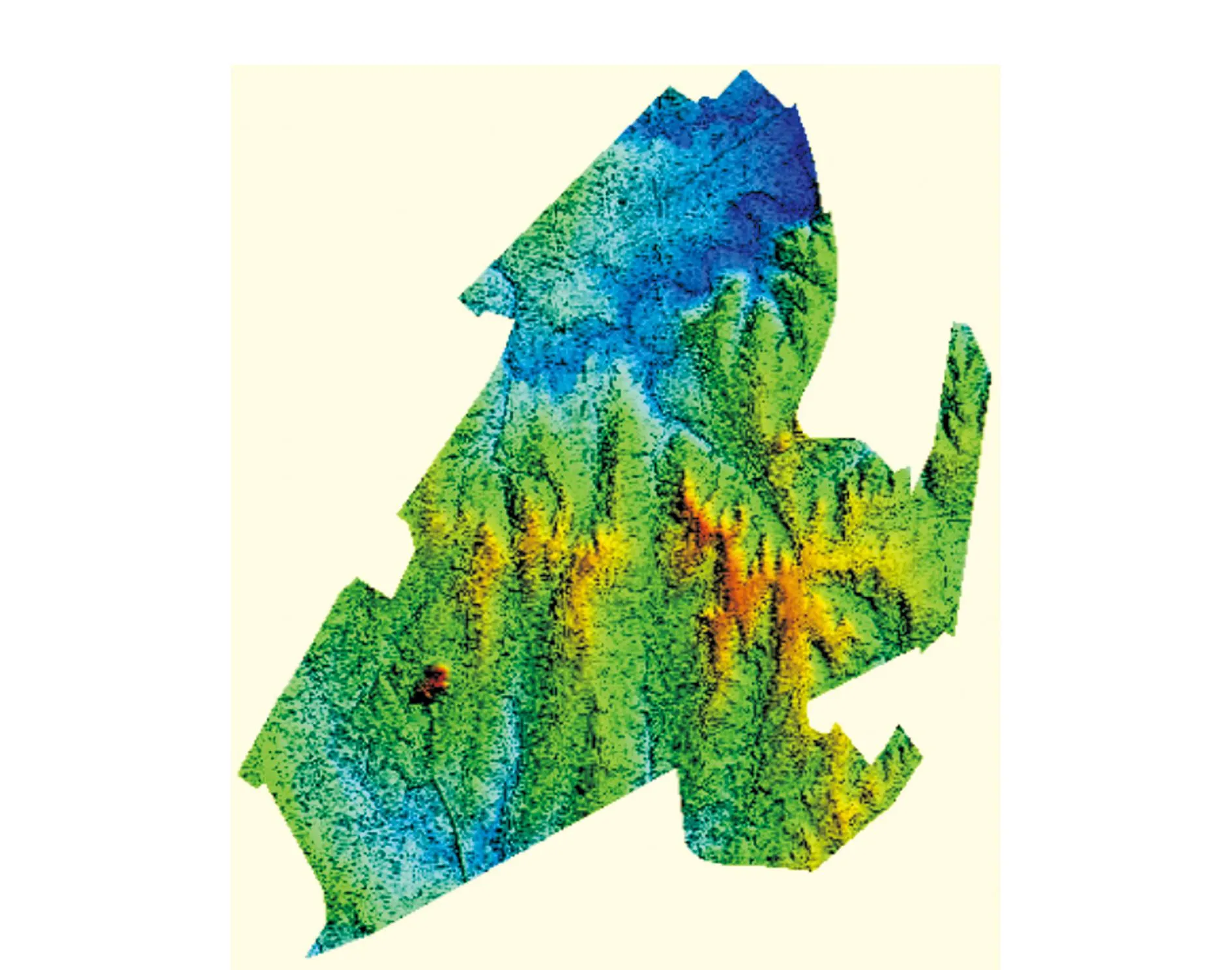
对滤波后的点云作张力样条插值运算,生成0.5 m格网的DEM,如图5所示。

图5 试验区DEM
需要指出的是,DEM的精度取决于点云的点位精度、密度和分布情况,任何内插算法都只是在已知初始数据的情况下预测未知高程。内插效果与地形相关性很大。
关于DEM对地形描述精度的问题,这里不做过多的讨论,本文寻求在一定的空间尺度(够用)上解译试验区内断裂构造及其分布。
2DEM晕渲
2.1DEM晕渲
DEM晕渲是突出DEM地形表达效果的一种方式,它通过设置光源的高度角和方位角、着色渲染来展示目标地区的地形。此方法可以较好地反映地形地势的变化,有助于识别地形突变及断裂构造处。在Global mapper中实现常用的几种晕渲,如图6所示。
HSV即色调、饱和度、亮度(灰度),它是一个描述色彩的颜色模型。2013年肖雄武等构造了一组由高程、反射光强到 HSV 色彩空间分量的映射模型,晕渲效果较好。
通过这些晕渲与增强,可以将真实地面的微地形及其几何关系形象地表达出来,比如它可以寻找断层三角面的位置(见图7),为寻找活动断层提供依据。

(a)DEM的全局晕渲
(b)DEM的渐变色晕渲

(c)DEM的梯度晕渲
(d)DEM的HSV晕渲图6 常用的晕渲
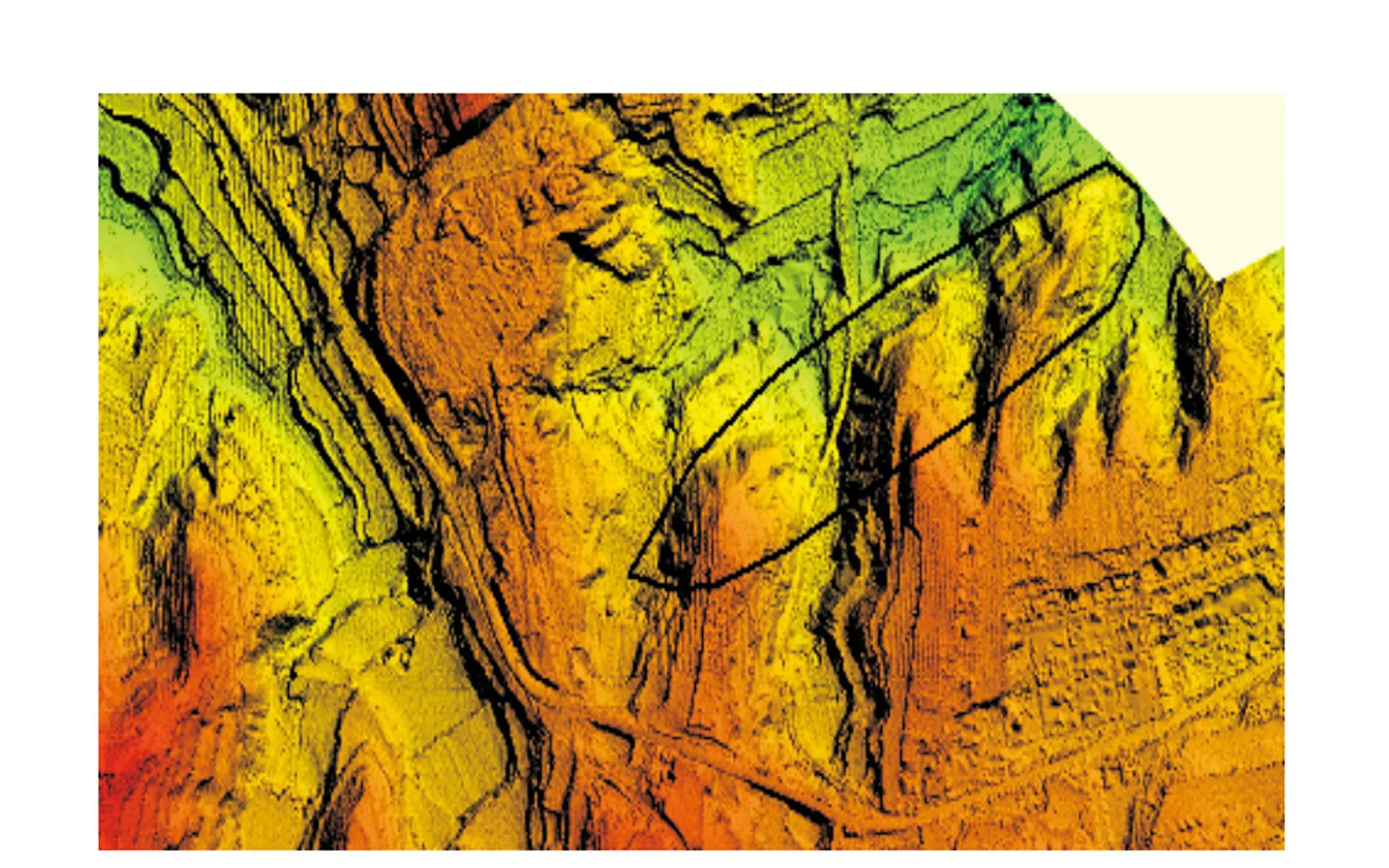
图7 寻找断层三角面
2.2DEM定向滤波及晕渲
方向滤波是空间域滤波的一种。为了增强具有方向性的边缘和线条,使细节突出,选取方向模板算子对DEM栅格图进行锐化处理。一般地,3×3滤波模板F(i,j)作用下,中心像元灰度Gray(x,y)可表示为
Gray(y+i-1,x+j-1).
(1)
在ENVI中,本文尝试了4个倾斜方向上的定向滤波,经比较,45°方向定向滤波最有利于试验区断裂构造解译,这与断裂走向具有较高的契合度。本文所用滤波算子参数可由如下矩阵表示。

(2)
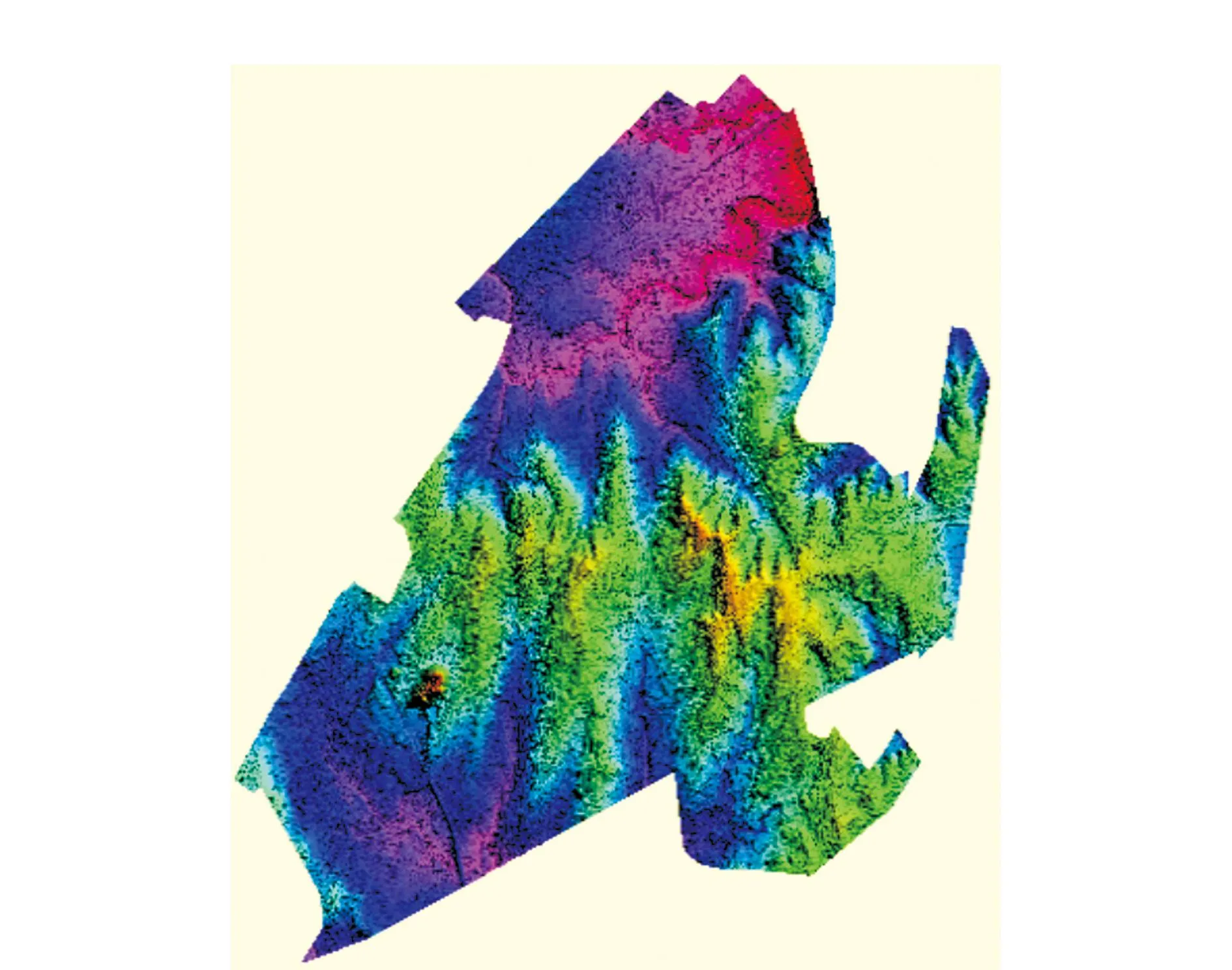
对试验区DEM进行45°定向滤波后的DEM及其全局晕渲如图8、图9所示。

图8 试验区DEM45°定向滤波所得DEM

图9 45°定向滤波后DEM全局晕渲
3DEM断裂构造解译
3.1DEM断裂构造解译标志
在断裂展布处往往存在微型地貌呈线状或几何正相关排列的地形,如呈线状排列的深切沟谷、陡坎、串列的垭口洼地及线性隆起的边缘等。虽然线性构造未必都是断裂构造,但自然发育的线性构造往往都是断裂构造展布的直接或间接标志。
坡度及梯度方面,一般来说,断裂构造的活动时代越新,断层陡坎的坡度越陡;反之,坡度越趋平缓,没有明显的梯度特征。而经过沉积作用后,这种判别效果会减弱。另外,可直接由断层三角面解译断裂构造及其展布情况。
3.2人机交互解译
在仅仅依靠DEM的情形下,地形的起伏是进行断裂构造解译的前提[14]。根据本文所列举的断裂构造解译标志(还可以结合机载LiDAR系统获取的高分影像数据),寻找能够由上述标志所解释的地形地貌单元。绘制试验区断裂构造解译图,如图10所示。

(a)试验区
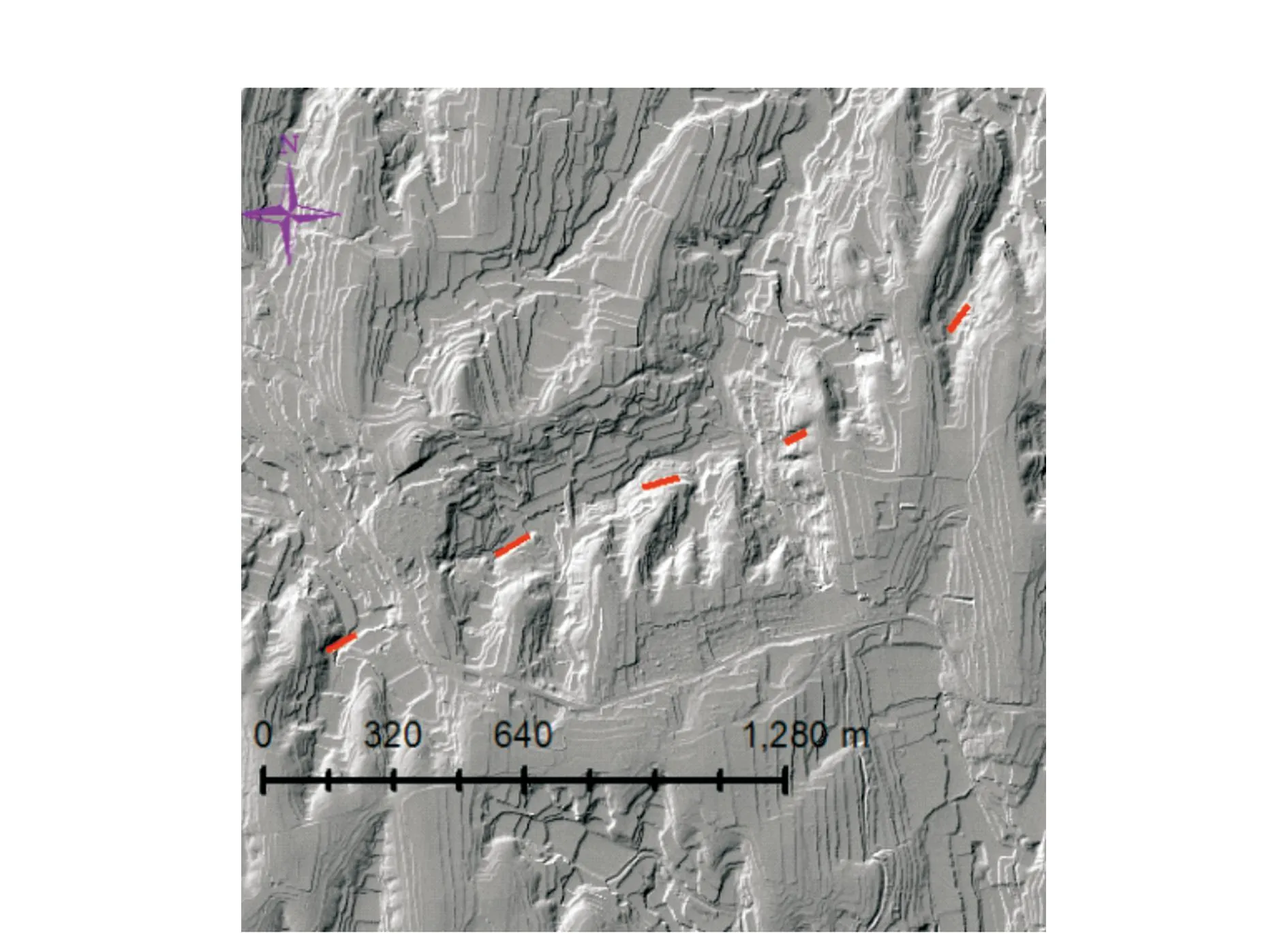
(b)图例图10 试验区断裂构造解译
4结束语
本文以机载LiDAR点云数据为依据,经过点云滤波,内插采样生成0.5 m格网的DEM、DEM增强(晕渲、定向滤波等),获取到有利于识别断裂构造标志和走向的地形地貌数据,并进行了断裂构造及其展布的解译。最终解译出试验区内数条地表形态较为突出的断层线,其位置、走向和长度与获取的地质钻井资料有较高的契合度。本文初步建立了基于机载LiDAR点云数据构建DEM,并以构建的DEM进行断裂构造解译的标志和规程,为后续基于机载LiDAR技术研究断裂构造的地表展布特征与规律提供参考,也为精密工程勘察与选址提供相关数据。
参考文献
[1]孙文鹏,方茂龙,蔡文伯,等.断裂构造的有序性及断裂研究的三个阶段[J].地质论评,2000(S1):305-311.
[2]徐世潮.多源遥感图像提取断裂构造的方法研究[D].西安:西北大学,2015.
[3]彭丹青,李京,陈云浩,等.基于先进对地观测卫星遥感影像的断裂识别——以江西德兴为例[J].自然灾害学报,2008,17(6): 124-128.
[4]陈国珖.中国冶金百科全书·采矿[M].北京:冶金工业出版社,1999:107-108.
[5]覃昕垚,张建军,王勇,等.机载LiDAR定位精度分析[J].测绘工程,2016,25(5):32-35.
[6]卢遥,卢小平,武永斌,等.综合机载LiDAR与高分影像的煤矿区典型地物提取方法[J].测绘通报,2015(12): 57-59.
[7]魏占玉,何宏林,高伟,等.基于LiDAR数据开展活动断层填图的实验研究——以新疆独山子背斜-逆冲断裂带为例[J].地震地质,2014,36(3):794-813.
[8]刘静,陈涛,张培震,等.机载激光雷达扫描揭示海原断裂带微地貌的精细结构[J].科学通报,2013(1):41-45.
[9]刘耀辉,李金平,王刘伟.红河断裂带闭锁程度和滑动亏损分布特征研究[J].测绘工程,2015,24(8):20-22.
[10] 刘耀辉,李金平,王刘伟.小江断裂带地壳运动特征及地震危险性研究[J].测绘工程,2015,24(7):58-60.
[11] 陈洁.机载LiDAR技术在断裂构造解译中的应用研究[D].北京:中国地质大学,2013.
[12] 董保根,梁世波,李慎芳,等.浅析机载LiDAR点云的滤波与分类[J].遥感信息,2015,30(6): 67-70.
[13] 谷延超,范喆宇,范东明,等.基于不同滤波算法差异的机载LiDAR数据桥梁提取[J].测绘工程,2014,23(11): 67-70.
[14] KONDO H,TODA S,OKUMURA K,et al.A fault scarp in an urban area identified by LiDAR survey: A Case study on the Itoigawa-Shizuoka Tectonic Line,central Japan[J].Geomorphology,2008,101(4):731-739.
[责任编辑:郝丽英]
The identification of fault structure based on airborne LiDAR data
MA Huihui1,2,ZENG Chunwei1,2
(1.School of Surveying and Land Informationengineering,Henan Polytechnic University,Jiaozuo 454003,China;2.Key Laboratory of Mine Spatial Information Technologies,State Bureau of Surveying & Mapping,Henan Polytechnic University,Jiaozuo 454003,China)
Abstract:Interpretation of fault structure provides guidelines for locating mineral deposits and their distribution,meanwhile,it is related to the interpretation of seismic activity.Aiming at the low efficiency of fault structure,the paper generates the DEM based on airborne LiDAR point cloud data,then,the method of combining DEM hill shading and DEM directional filtering is given to study the interpretation symbols and rules of the fault structure.Thereafter,this paper interprets a fault structure through human-computer interaction.Compared with the available geological information,it proves correct.The test shows that,with the support of the airborne LiDAR technology,it is feasible and efficient to interpret the fault structure using the method of human-computer interaction.
Key words:airborne LiDAR; DEM; fault structure
DOI:10.19352/j.cnki.issn1671-4679.2016.03.001
收稿日期:2016-03-11
基金项目:国家自然科学基金资助项目(U1304402);河南理工大学博士基金资助项目(B2009-80)
作者简介:马慧慧(1990-),女,硕士研究生,研究方向:遥感原理及应用.
中图分类号:P542
文献标识码:A
文章编号:1671-4679(2016)03-0001-05
