
单轴式声悬浮器的仿真与优化
2016-07-19 03:42于浩洋谢忠玉
黑龙江工程学院学报 2016年3期
张 鹏,于浩洋,谢忠玉
(黑龙江工程学院 电气与信息工程学院,黑龙江 哈尔滨 150050)
单轴式声悬浮器的仿真与优化
张鹏,于浩洋,谢忠玉
(黑龙江工程学院 电气与信息工程学院,黑龙江 哈尔滨 150050)
摘要:介绍一种单轴式声悬浮器的分析和优化方法,应用有限元分析方法对由平面反射面和单轴式郎之万超声换能器组成的单轴式声悬浮器进行仿真分析,确定作用在被悬浮小球上的声辐射势以及悬浮力,并通过在悬浮器中放置小球的方法对仿真结果的正确性进行验证。文中还使用相同的方法对由凹球面反射面组成的悬浮器进行优化设计,确定最优谐振腔高度以及凹球反射面的最优曲面半径。仿真和实验结果表明,经过优化设计的凹球反射面声悬浮器的悬浮性能是平面反射面声悬浮器性能的2.51倍。
关键词:单轴式;超声悬浮;凹球反射面;有限元方法
超声驻波悬浮是一种利用高强度超声驻波声场中产生的声辐射力来平衡重力,使得声场中物体悬浮起来的现象。1866年,德国人August Kundt首次发现声悬浮现象,之后,声悬浮技术得到了迅速发展,成为一种优秀的实验和操纵技术,在物体性质的测量、流体的力学性能分析、无容器条件下的材料制备[1]、地面失重现象模拟[2]、微操控系统、生物工程[3]等领域是一项不可或缺的实验手段。在各种悬浮技术中,声悬浮技术对被悬浮物体的物理性质没有特殊要求,理论上可以浮起任何物体,悬浮力较大且控制方法多样,从而得到了广泛的应用[4-9]。
在诸多种类的声悬浮器中,最简单的声悬浮器被称为单轴式声悬浮器[10-11],它由一个超声换能器和一个反射面组成。多数的单轴式声悬浮器使用郎之万式的压电超声换能器作为超声波发生器,用来在反射面和换能器辐射面之间形成超声驻波声场。King[12]1934年首次对刚性小球在超声驻波声场中受到的声辐射力进行了计算。之后,Gor’kov[13]导出了另外一种更为简单的用来计算在任意声场中作用在小球上的声辐射势能的方法。西北工业大学的解文军[14]应用边界元方法和Gor’kov的理论研究了几何参数对单轴式声悬浮器的影响,并成功悬浮起了小甲虫和金属球。本文使用有限元方法和Gor’kov的理论,通过计算悬浮器声场中的声辐射势的分布,来分析和优化单轴式声悬浮器。
1数值模型
对于悬浮空间中声场的仿真模拟能够更直观展现悬浮空间的声场情况,本文利用有限元分析软件ANSYS对声场中的声学参量进行仿真计算。为了简化分析过程,在构建声悬浮器的有限元模型时,将声悬浮器中使用的郎之万换能器简化为一个以换能器谐振频率振动的平板,文中使用的声悬浮系统数值分析模型如图1所示。

图1 具有平面反射面的声悬浮系统数值模型
图中,换能器辐射面与反射面之间的空气区域构成了声悬浮器内部声场谐振腔区域,H表示谐振腔的高度,d1表示换能器辐射端面的直径,d2表示反射面的直径。
根据Gor’kov的理论,当驻波声场中刚性小球的半径远小于声波波长时,作用在刚性小球上的声辐射力的时间平均势U的表达式为
(1)

于是,作用在小球上的声辐射力可以表达为

(2)
式(1)中的v可以通过式(3)计算得到

(3)
为了简化计算,定义相对声辐射势为
(4)
于是,声辐射力的相对形式可以表达为
(5)
根据超声驻波悬浮的原理可知,在不同谐振腔高度的条件下,空间中入射波与反射波的叠加过程将发生改变,形成不同的声场,声悬浮器的悬浮性能也会随之发生变化。当谐振腔高度接近半波长整数倍时,满足驻波叠加条件,将会在空间中形成稳定的驻波声场。
图2给出了在辐射端面直径d1=12.5 mm、反射端面直径d2=25 mm、谐振腔高度为H=9 mm、辐射端振幅A=1×10-6m、振动频率f =20 kHz条件下的声场中相对声辐射势的分布情况。声场中相对声辐射势的极小值出现的位置对应于小球的仿真悬浮位置,见图2中标注“+”的位置。从图2可以看到,在谐振腔高度为9 mm的条件下,声场中只有1个悬浮点,位于z轴上z=-4 mm的位置。

图2 谐振腔高度为9 mm时,声场中相对声辐射势的分布情况
图3给出了沿z轴方向的Ur和Frz之间的关系曲线。图中,Ur的最小值点对应于竖直方向悬浮力Frz为0的点。声场中被悬浮小球除了受到声悬浮力的作用,还受到重力的作用。从图3可以看出,只有忽略被悬浮小球的质量时,小球才能悬浮在声辐射势的最小值点。而对于一个质量不为0的小球,其悬浮位置会沿z轴向下移动。当小球受到的重力超过竖直悬浮力的最大值时,小球将无法悬浮在声场中。

图3 谐振腔高度为9 mm时,声场中沿z轴方向的声辐射势Ur与竖直悬浮力Frz分布曲线
Barmatz[15]指出,在声辐射势最小值点附近声场中悬浮的小球,其运动特性可以近似为一个弹簧振子。因此,在声辐射势最小值点附近,可以定义一个弹性常数Kr,用来衡量不同声辐射势最小值点的悬浮性能,Kr值越大,被悬浮小球的稳定性越好。弹性常数Kr的定义如下:
(6)
基于上述方法,为了获得上述水平反射面条件下的最优谐振腔高度值,对谐振腔高度H为5~14 mm条件下的声场声辐射势进行了仿真与计算,此时声场中只有一个悬浮点。仿真得到的沿z轴的悬浮点附近最大弹性常数Krzmax分布曲线如图4所示。
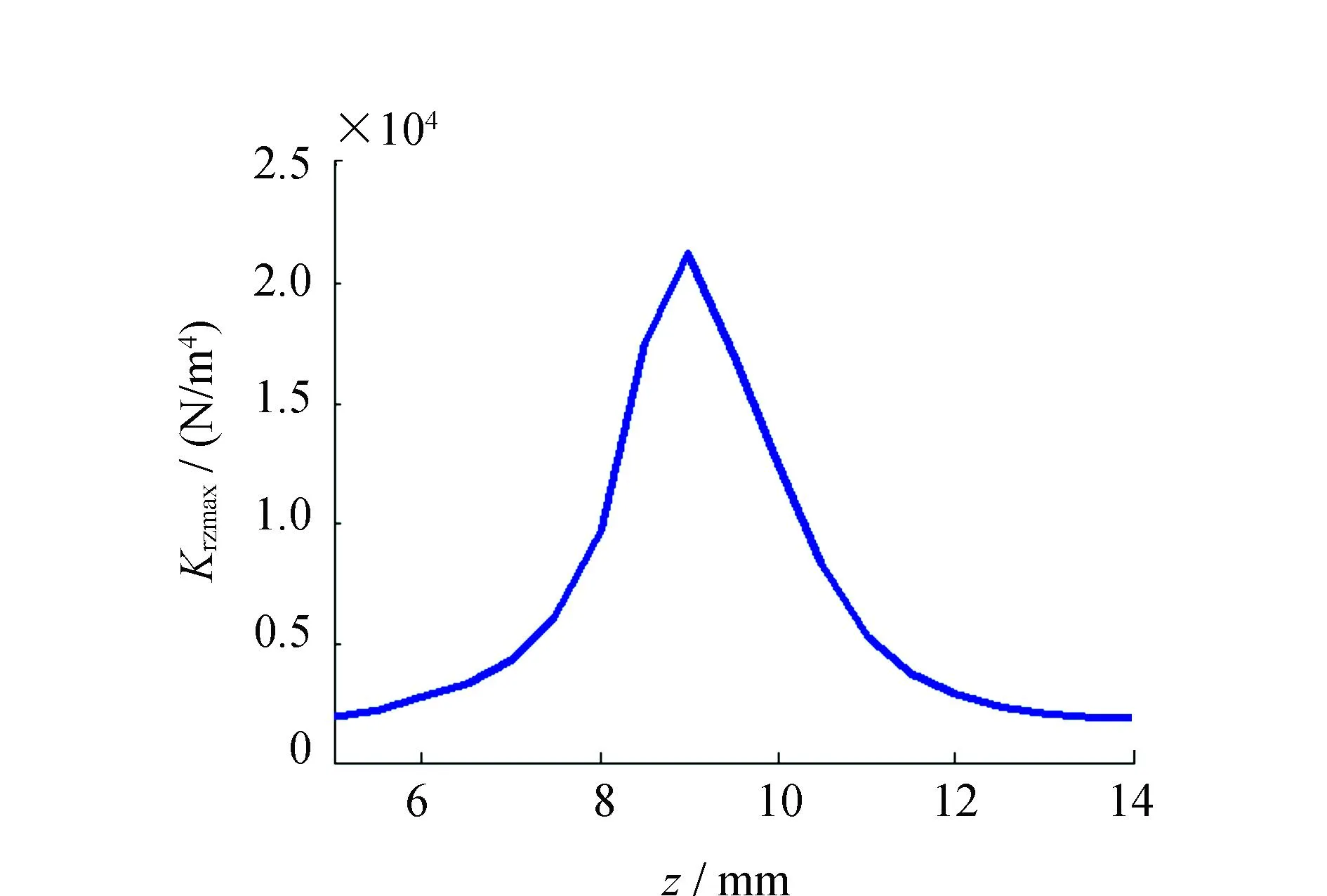
图4 H为5~14 mm时,沿z轴的悬浮点最大弹性常数Krzmax分布曲线
从图4可以看出,当z=9 mm时,Frz取得最大值2.1×104N/m4。此时,悬浮小球的稳定性最好。图5给出了谐振腔长度为9 mm时,聚苯乙烯泡沫小球悬浮在声场中的实验照片。实验测得小球的实测悬浮位置为z=4 mm,其结果与仿真获得的悬浮位置完全吻合。

图5 聚苯乙烯泡沫小球悬浮实验照片
2曲面反射面优化设计
超声驻波悬浮是利用声波的非线性效应来悬浮物体,而声悬浮装置的结构尺寸对悬浮性能有很大的影响。为了获得较大的悬浮力,我国的很多高校都对声悬浮装置的结构进行了改进,西北工业大学空间材料科学实验室解文军博士[19,42]将声悬浮装置的反射端面由平面改造为凹球面、双曲面和抛物面三种形状,并分别对其悬浮能力进行了对比,实验得出,当反射端设计成凹球面时,声悬浮器可以获得更好的悬浮性能。
根据上述结论,凹球面具有超声波聚焦的作用,能够较好地提高声悬浮器悬浮的能力,本文接下来使用有限元方法设计了一个凹球面的反射面来优化作用在小球上的声辐射力,仿真所使用的2维数值模型见图6。
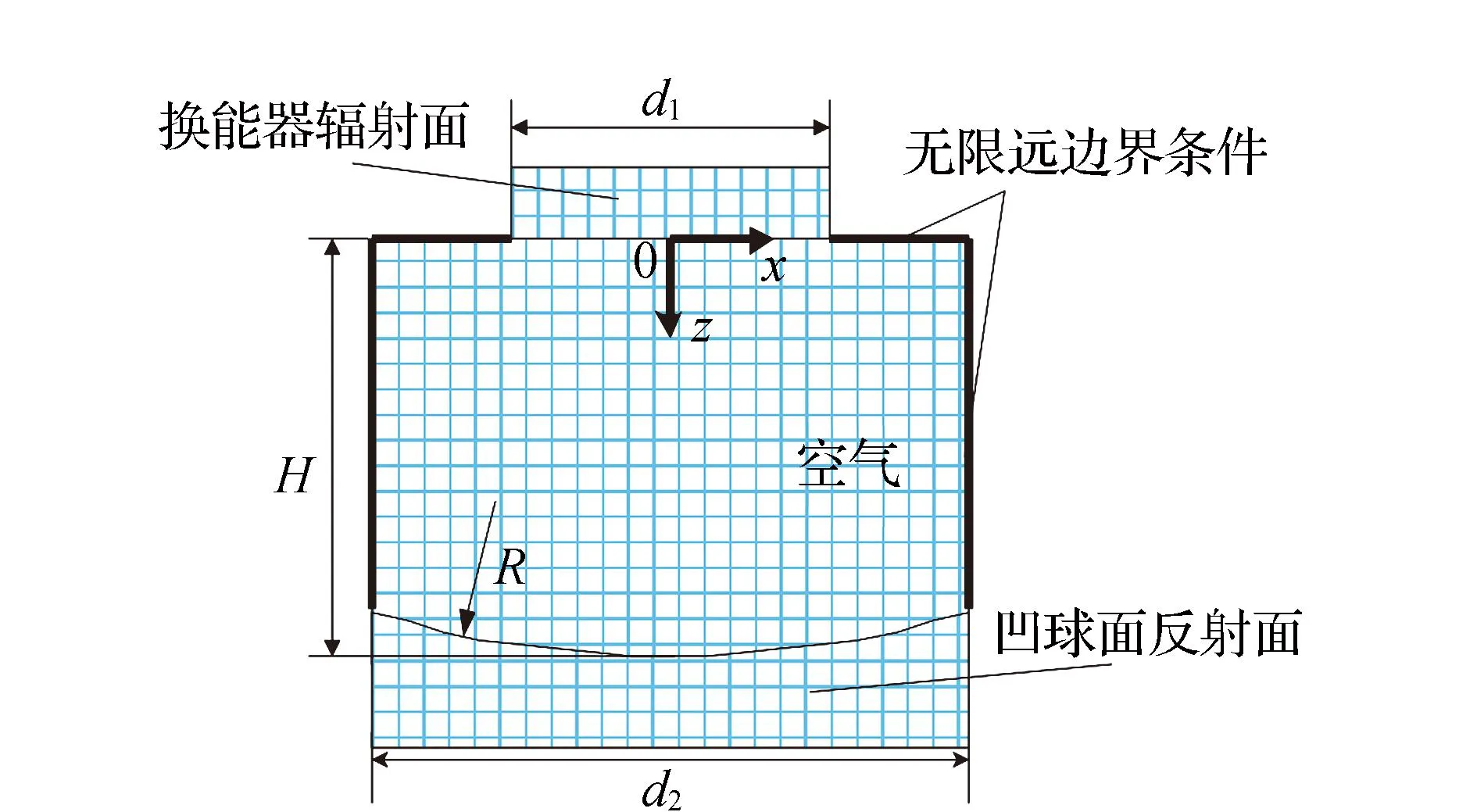
图6 具有凹球面反射面的声悬浮系统数值模型
图中声场谐振腔的几何形状由凹球面半径R,谐振腔高度H (换能器辐射面到凹球面最低点的距离)以及换能器辐射面直径d1和反射面的直径d2共同决定,其中换能器辐射面直径d1以及反射面的直径d2分别设定为12.5 mm和25 mm。为了确定在声场中只有一个悬浮情况下R和H的最优值,对凹球面反射系统在凹球面半径20 mm≤R≤35 mm,谐振腔高度5 mm≤H≤14 mm的条件下进行了有限元仿真,确定了声场中的声辐射势分布情况,并计算了沿z轴方向的悬浮点附近的最大弹性常数Krzmax。在仿真中取辐射面振幅为A=1×10-6m,振动频率为f =20 kHz,仿真结果见图7。
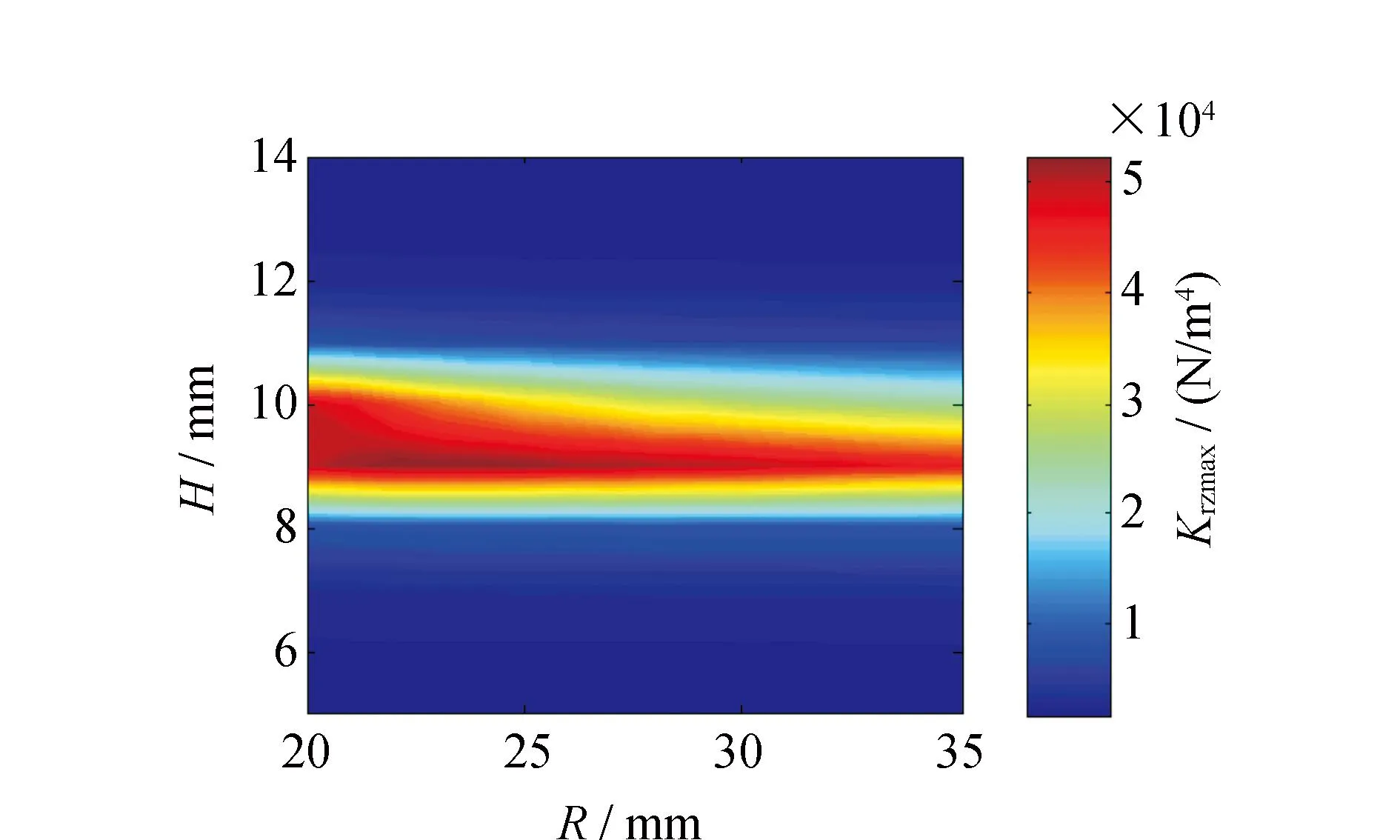
图7 在20 mm≤R≤35 mm,5 mm≤H≤14 mm条件下,沿z轴方向的悬浮点附近的最大弹性常数Krzmax
由图7可知,对于在20~35 mm范围内取值的凹球面半径,谐振腔高度H为8~10.5 mm时,悬浮点附近的弹性常数可以获得较大的数值。特别是当R=24 mm,H=9 mm时,弹性常数Krz取得最大值。为了证明所使用的数值模型的有效性,使用聚苯乙烯小球进行了悬浮实验。在实验中,小球可以稳定地悬浮在振动面和凹球反射面之间,其实际悬浮位置与仿真获得的悬浮位置一致。图8给出了通过仿真声场中声辐射势而获得的仿真悬浮位置与实验获得的实际悬浮位置的比较结果。仿真获得的最大弹性常数为5.3×104N/m4,其值是反射面为平面情况下的2.52倍。这说明在单轴式超声悬浮器中,与平面反射面相比,凹球面反射面能提高声场中悬浮点附近的弹性系数,从而提高被悬浮物体的悬浮稳定性。

图8 仿真悬浮位置与实验悬浮位置的比较
为了验证凹球面反射面比平面反射面具有更好的悬浮性能,在两种不同反射面的配置下,进行了悬浮最小激励电压对比实验。在实验中,首先通过调整换能器的激励电压,使得聚苯乙烯小球稳定地悬浮在声场中,之后降低换能器激励电压直到小球掉落在反射面上,此时的激励电压值为满足小球悬浮条件的最小激励电压值。表1给出了实验结果。

表1 不同反射面条件下悬浮所需最小激励电压
从表1可以得到,凹球型反射面情况下,悬浮所需最小电压为10.2 V;平面反射面情况下,悬浮所需最小电压为25.1 V,是前者的2.46倍。实验结果说明,使用经过优化的凹球面反射面的超声悬浮器的悬浮性能要优于平面反射面,实验结果与仿真结果一致性较好。
3结束语
本文应用有限元方法对单轴式超声悬浮器进行了仿真与优化,确定了悬浮器的反射面为平面时的最优谐振腔高度,以及反射面为凹球面时的最优凹球面半径和谐振腔高度,证实了使用凹球面反射面可以提高单轴式超声悬浮器的悬浮性能。
参考文献
[1]CAO Youming,XIE Wenjun,SUN Jun,et al.Preparation of epoxybledns with nanoparticles by acoustic levitation technique[J].Journal of Applied Polymer Science,2002,86:84-89.
[2]潘祥生,邢立华,李勋,等.聚焦式超声悬浮[J].北京航空航天大学学报,2006(1):79-82.
[3] SANTESSON S,DEGERMAN E,RORSMAN P,et al.Cell-cell communication between adipocytes and pancreatic β-cells in acoustically levitated droplets[J],Integr.Biol.,2009,1:595-601.
[4]VANDAELE V,LAMBERT P,DELCHAMBRE A.Non-contact handling in microassembly: Acoustical levitation[J].Precision Engineering,2005,29:491-505.
[5]陈超,王均山,刘通.超声悬浮式陀螺的结构设计及悬浮特性分析[J].振动、测试与诊断,2013,33(6):1060-1064.
[6]朱金冬.超声波无触点支承陀螺仪技术的理论分析及实现[J].中国惯性技术学报,2006(6):54-56.
[7]焦晓阳,刘建芳,刘晓论,等.超声驻波悬浮能力特性[J].吉林大学学报(工学版),2013,43(2):340-345.
[8]殷国平,王广勋,殷振,等.基于有限元的超声聚焦悬浮振子设计研究[J].甘肃科技纵横,2014,43(8):29-31.[9]魏彬,马希直,唐伟坤.压电陶瓷激励下的超声悬浮特性研究[J].压电与声光,2011(1):76-78 .
[10] KOZUKA T,TUZIUTI T,MITOME H.One-dimensional transportation of particles using an ultrasonic standing wave[J].Sixth International Symposium on Micro Machine and Human Science 0-7803-2676-8/95 1995 IEEE.
[11] REINHART G,HOEPPNER J,ZIMMERMANN J.Non-contact handling of wafers and microparts using ultrasonics.In: Proceedings of the Seventh Mechatronics Forum International Conference,Elsevier; 2000.
[12] KING L V.On the Acoustic Radiation Pressure on Spheres[J].Proceedings of the Royal Society A,1934,147: 212-240.
[13] GOR’KOV L P.Forces acting on a small particle in an acoustic field within an idealfluid [J].Dokl Akad Nauk Soiuza Sov Sotsialisticheskikh Resp,1961,140(1):88-92.
[14] 解文军.声悬浮优化设计理论及应用研究[D].西安:西北工业大学,2002:1-2.
[15] BARMATZ M,COLLAS P.Acoustic radiation potential on a sphere in plane,cylindrical,and spherical standing wave fields[J].Journal of American society,1984,77(3): 928-945.
[责任编辑:郝丽英]
Simulation and optimization of single-axis ultrasonic levitator
ZHANG Peng,YU Haoyang,XIE Zhongyu
(College of Electrical and Information Engineering,Heilongjiang Institute of Technology,Harbin 150050,China)
Abstract:A finite element analysis and a parametric optimization of the single-axis acoustic levitators are presented.The finite element method is used to simulate an acoustic levitator consisting of a Langevin ultrasonic transducer and a plane reflector.The acoustic radiation potential and the acoustic levitation force that acts on small spheres are determined by using the finite element method.The validity of the simulation result is verified experimentally by placing small spheres in the levitator.The same procedure is used to optimize a levitator consisting of a spherical reflector and the optimized height of the resonant cavity and the radius of the spherical reflector are determined.The experimental and simulation results show that the performance of the levitator consisting of an optimized spherical reflector is 2.51 times compared with the levitator consisting of a plane reflector.
Key words:single-axis;ultrasonic levitation;spherical reflector;finite element method
DOI:10.19352/j.cnki.issn1671-4679.2016.03.009
收稿日期:2016-03-23
基金项目:黑龙江省教育厅科学技术研究资助项目(12531561)
作者简介:张鹏(1980-),男,副教授,研究方向:检测技术与自动化装置.
中图分类号:TH6
文献标识码:A
文章编号:1671-4679(2016)03-0033-04
