
风力摆自动控制系统的设计及测试
2016-07-29 09:55邓彬伟刘合鑫
湖北理工学院学报 2016年3期
孙 湉,张 刚,邓彬伟,胡 瑶,刘合鑫
(湖北理工学院 电气与电子信息工程学院,湖北 黄石 435003)
风力摆自动控制系统的设计及测试
孙湉,张刚,邓彬伟*,胡瑶,刘合鑫
(湖北理工学院 电气与电子信息工程学院,湖北 黄石 435003)
摘要:以32位STM32F103ZET6单片机为核心,给出了风力摆控制系统的实现方案。系统由风力摆、MOS管全桥驱动、三维角度传感器和TFT彩屏等构成。为获取实测数据,设计了测试方案,完成了不同条件下的测试。测试结果表明,该系统在仅受直流风机动力控制下实现了风力摆快速起摆、画线、限时制动和准确画圆,以及风力影响后能够快速恢复画圆状态等功能,达到或超过了设计指标要求。系统具有人机交互友好、结构稳定、误差小的特点。该系统为四轴飞行器系统测试方案的确定、测试参数的选用、测试数据的分析等提供了借鉴。
关键词:STM32F103ZET6;三维角度传感器;MOS管全桥驱动;空心杯电机
四轴飞行器可广泛应用于军民各领域,具有造价低廉、操作简便、维护简单、可重复性强等诸多优点。大量科技工作者从机构设计、飞行控制等方面总结了四轴飞行器的发展现状及发展技术路线,分析了四轴飞行器的基本原理与结构,探讨了其相关的关键技术和应用领域,展望了四轴飞行器未来的发展方向和应用前景[1-2]。
随着单片机技术和传感器技术的发展,对四轴飞行器的研究也越来越多,各种设计方案各有特点,应用范围也各有不同。这些研究,以四轴飞行器飞行原理为基础,给出了自主飞行控制系统不同的整体结构,针对姿态信息的不同获取方法,选用不同类型的单片机并采用不同的控制算法,完成了四轴飞行器的软、硬件设计和调试,建立了各自相应的飞行平台[3-6]。
风力摆自动控制是进行无人机设计研究的基础,对其的深入分析和研究,可为四轴飞行器系统测试方案的确定、测试参数的选用、测试数据的分析等提供借鉴。
本设计以32位STM32F103ZET6单片机为核心,分析了风力摆控制系统的基本原理并给出了实现方案。
1系统设计方案
1.1系统总体方案设计
系统由MOS管全桥驱动、风力摆、三维角度信息采集、液晶显示器和电源等模块构成。风力摆通过万向节与碳素杆连接风机组成。三维角度传感器不断采集风力摆当前角度信息,反馈给单片机并显示在TFT彩屏上,经数据处理后通过控制PWM波占空比控制风机转速,实现对风力摆的控制。
1.2设计方案论证
1.2.1电机驱动模块
通过分析比较,MOS管全桥驱动内部的压降一般比较低,在驱动电路上的功耗较低,能够很好地满足驱动需求,操作方便,因此是一种合适的选择。
自制的IR7843MOS管全桥驱动电路主要包括驱动电路和逻辑控制电路两大部分。驱动电路采用5 V输入电源,经该驱动电路可增大输出的上限电流,驱动电机工作。
1.2.2风力摆
系统采用4只空心杯直流电机作驱动,其体积小、功率大、抗干扰能力强,可以产生较大的风力,足以将飞行器提升至所需要的高度。
1.2.3角度信息采集模块
三维角度传感器MPU6050集成了3轴MEMS陀螺仪、3轴MEMS加速度计,以及一个可扩展的数字运动处理器DMP。MPU6050和所有设备寄存器之间的通信采用400 kHz的I2C接口,实现高速通信。其内置可编程卡尔曼滤波器,采用最优化自回归数据处理算法精确测量风力摆当前姿态角。MPU6050对陀螺仪和加速度计分别用了3个16位的ADC,将其测量的模拟量转化为可输出的数字量,通过DMP处理器读取测量数据然后通过串口输出。
采用三维角度传感器MPU6050,可适时测量风力摆当前角度,通过处理采集的角度数据控制风机带动风力摆运动。此方案可精确测量风力摆当前角度,实现对风力摆的精确控制。
1.2.4液晶显示器模块
选用TFT-LCD真彩液晶显示器,其屏幕大、可显示较多内容,同时具有较高分辨率,自带触摸屏,具备高智能性,便于测试操作。
1.2.5电源
若要求电路连接比较简单,则整个系统都采用同一电源电路。由于空心杯电机启动瞬间需求电流较大,给定脉冲信号驱动的电机电流也有较大波动,会造成干扰,对单片机系统造成严重的干扰,缺点明显,故不宜采用同一电源电路。
本设计采用双电源供电,可完全隔离电机驱动电源(5 V)和单片机的供电电源(3.3 V),能彻底消除电机驱动所造成的干扰,降低主控制板的负载,提高系统的稳定性。
2理论分析和计算
2.1风力摆状态的测量与计算
应用集成的三轴陀螺仪和三轴加速度计获取姿态信息,实现飞行器定向、定点、定高的飞行控制,具有较好的应用前景[5]。
风力摆状态信息是最基本、最重要的控制信息,采用三维角度传感器MPU6050获得角度信息。设α与β分别为当前角度值与上一次计算出的角度值,其单位为度(°),Gyro为陀螺仪敏感轴偏转值,也就是当前敏感轴读数,C_Gyro为前一次陀螺仪敏感轴偏转值,R_Gyro为陀螺仪当前轴向加速度,测量陀螺仪角度计算方法为:
α=β+(Gyro-C_Gyro)R_Gyro
(1)
2.2风力摆运动控制分析与计算
可选用的控制算法主要有逻辑判断法、查表法、定点PID法、力合成法、矢量方程法等。风力摆采用姿态角位置PID控制算法,可有效提升控制系统鲁棒性,具有结构简单、控制可靠、响应快速无静差和较小超调量等优良性能[6]。本设计采用位置式PID控制方式。
位置式PID控制方式由比例单元(P)、积分单元(I)和微分单元(D)组成。设Kp、TI、TD分别为比例系数、积分时间常数、微分时间常数,则PID控制器输入e(t)与输出u (t)关系及传递函数分别为:

(2)
(3)
式(2)中e(t)为PID控制量的相邻2次采样偏差,对于上述PID系数的整定方案,一般步骤如下。
1)确定比例系数Kp:调整比例系数Kp时,一般令Tr=0,TD=0,使其变为纯比例调节。输入设定为系统允许最大值的60%~70%,由0开始逐步增加,直至系统出现振荡。从此时开始减小Kp,直至系统趋于稳定,记录当前比例系数Kp,设定比例系数为当前值的60%~70%,本设计取为61%。
2)确定积分时间常数Tr:确定比例系数Kp之后,将其加入到系统中,此时设定一个较大的Tr值,然后逐步减小Tr,直至系统出现振荡,之后逐步增大Tr值,直至系统振荡消失,记录此时Tr值,设定Tr值为当前调试值的150%~180%,本设计取为165%。
3)确定微分时间常数TD:微分时间常数一般为0即可,但在精密控制时仍然需要设定,整定方法与Kp、Tr类似,一般取系统不振荡的30%即可,本设计取为30%。
3程序设计
主程序框图如图1所示,系统中断流程图如图2所示。利用有干扰画圆,主要针对式(2)进行PID调试,以期达到控制器的准确定位性和快速跟踪性能要求。
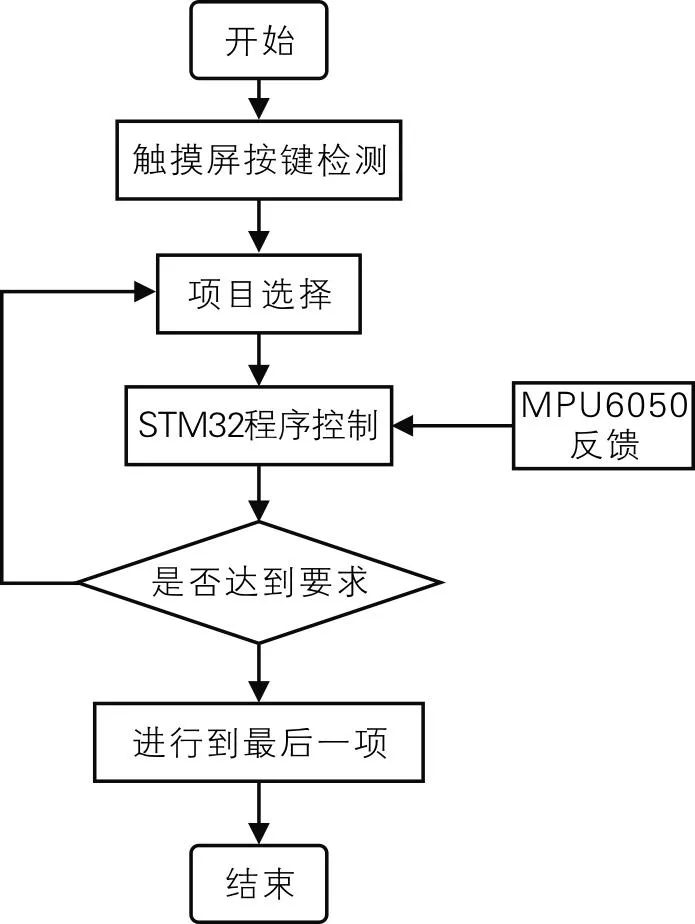
图1 主程序框图

图2 系统中断流程图
4测试方案与测试结果
4.1系统测试方案
为保证测试结果的合理性和完整性,系统性能测试分为无干扰和有干扰2种情况下的直线运动和圆周运动测试,直线测试又分为同角度与不同角度测试。无干扰测试主要检测系统的准确定位性能,有干扰测试主要检测系统的快速跟踪性能。
4.2系统测试
4.2.1长直线测试
驱动风力摆工作,使随机携带的激光笔稳定地在地面画出一条长度不短于50 cm的直线段,共测试5次,记录其稳定时间和最大线性偏差。测试数据如表1所示。测试结果表明,平均稳定时间和线性度偏差较小,性能远超“线性度偏差不大于±2.5 cm”的一般要求。

表1 风力摆画长于50 cm直线测试
4.2.2同角度不同长度直线测试
设置风力摆画线长度,驱动风力摆工作,记录其由静止至开始自由摆时间及在画不同长度直线时的最大偏差距离。测试数据如表2所示。测试结果表明,平均稳定时间和最大长度偏差较小,完美达到“15 s内、长度偏差不大于±2.5 cm”的设计要求。
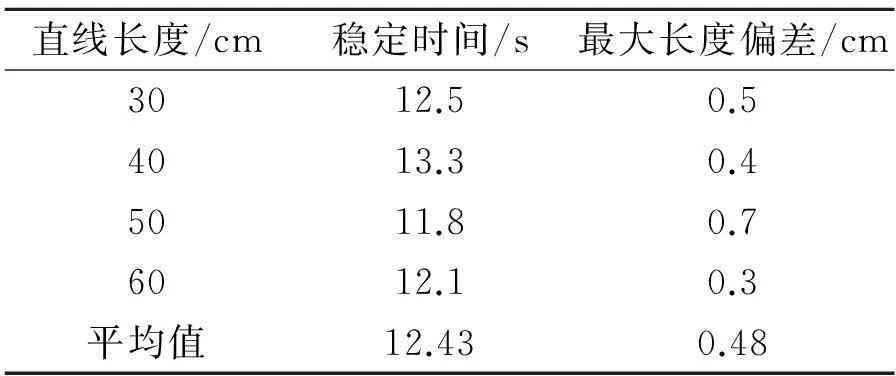
表2 风力摆画不同长度直线测试
4.2.3不同角度同长度直线测试
设置风力摆自由摆的角度,驱动风力摆工作,记录其由静止至开始自由摆时间及在画不同角度直线时的最大偏差距离。测试数据如表3所示。测试结果表明,平均稳定时间为10.3 s,平均所画直线长度为21.30 cm,性能超过“15 s内、直线段长度不短于20 cm”的设计要求。
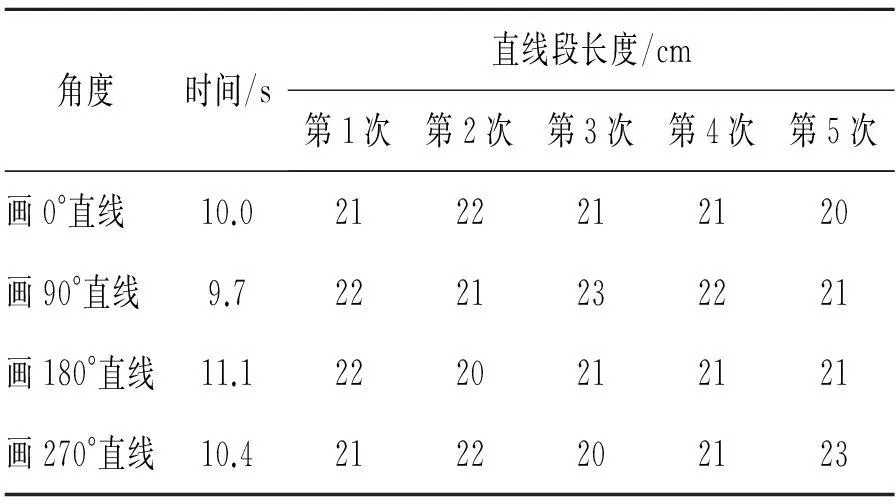
表3 风力摆画不同角度直线测试
4.2.4不同角度制动时长测试
将风力摆拉起一定角度放开,驱动风力摆工作,测试风力摆制动达到静止状态所用时间。测试数据如表4所示。测试结果表明,拉起不同角度时,回原点所需时间短,性能超过“5 s内恢复静止状态”的设计要求。
表4 风力摆恢复静止所用时间s

测试次数拉起角度/°30405060测试12.73.24.34.6测试222.53.63.8测试3333.94.2测试42.53.54.04.4测试5333.64.7平均时间2.643.043.884.34
4.2.5无干扰画圆测试
以风力摆静止时激光笔的光点为圆心,设置风力摆画圆半径,驱动风力摆用激光笔在地面画圆,记录其画3次圆所用时间以及最大偏差距离,半径不变重复测试3次。改变圆半径再次测试,重复以上操作,共进行5种不同半径的测试。测试数据如表5所示。测试结果表明,系统画圆时间较短、准确,满足“运动轨迹落在指定半径±2.5 cm”的设计要求。
4.2.6有干扰画圆测试
在画圆测试的基础上,使用一台60 W台扇在距离风力摆1m距离处向其吹5 s后静止,记录风力摆回复画圆状态时间。测试结果如表5所示。由表5可见,该系统结构稳定,画圆抗干扰能力强,达到“5 s内恢复指定半径±2.5 cm的圆周运动”的预期要求。
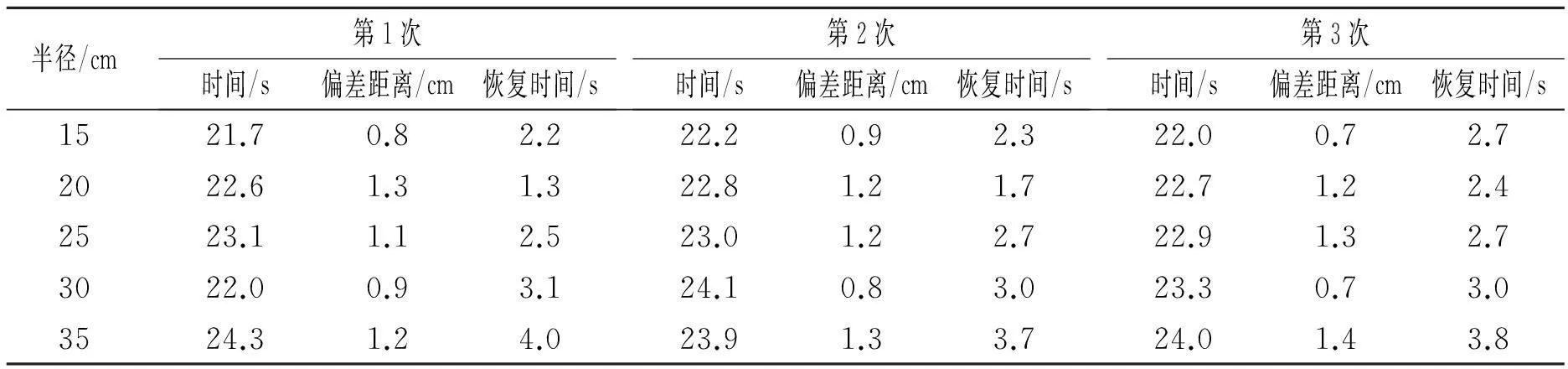
表5 风力摆画圆测试
4.3测试结果分析
测试数据表明,该系统在仅受直流风机动力控制下实现了风力摆快速起摆、画线、限时制动和准确画圆,以及风力影响后能够快速恢复画圆状态等功能,达到或超过了设计指标要求。
本系统结构设计合理,具有人机交互友好、结构稳定、误差小的特点。该系统为四轴飞行器系统测试方案的确定、测试参数的选用、测试数据的分析等方面提供了借鉴基础。
参 考 文 献
[1]方璇,钟伯成.四旋翼飞行器的研究与应用[J].上海工程技术大学学报,2015,29(2):113-118.
[2]聂博文,马宏绪,王剑,等.微小型四旋翼飞行器的研究现状与关键技术[J].电光与控制,2007,14(6):113-117.
[3]彭尘雨.四旋翼无人机自主飞行控制的设计和应用[J].科技创新导报,2014,16:73.
[4]郝芸,杨奇,佟皓萌.基于STM32的四轴飞行器设计[J].电子测试,2015(18):6-8.
[5]姜山,祝丽.小型四轴飞行器控制器设计的研究[J].电子世界,2014(22):260-261.
[6]易先军,周敏,谢亚奇.四旋翼飞行器控制系统的设计与实现[J].2014,36(11):59-62.
(责任编辑吴鸿霞)
收稿日期:2015-12-04
基金项目:湖北理工学院大学生科技创新项目(项目编号:14cx04);2014地方高校国家级大学生创新创业训练计划项目(项目编号:201410920027)。
作者简介:孙湉,助教,本科。
*通讯作者:邓彬伟,副教授,博士,研究方向:嵌入式系统、无线通信。
doi:10.3969/j.issn.2095-4565.2016.03.002
中图分类号:TP24
文献标识码:A
文章编号:2095-4565(2016)03-0005-05
Design and Test of Wind Pendulum Automatic Control System
Sun Tian,Zhang Gang,Deng Binwei*,Hu Yao,Liu Hexin
(School of Electrical and Electronic Information Engineering,Hubei Polytechnic University,Huangshi Hubei 435003)
Abstract:Taking 32-bit STM32f103ZET6 microcontroller as the core,the implementation scheme of the wind swing control system is given.The whole system is made up of MOS tube full bridge driver,3D angle sensor and a TFT color display.To achieve measured data,the test scheme is designed and the tests under different conditions have been done.The test results show that when only controlled by DC Blower power,this system can realize fast swing,line drawing,limited-time brake,accurate circle drawing and the function that circle-drawing state restores quickly under the effect of wind,which meets or surpasses the design requirements and realizes suspension function at arbitrary positions.The system has such characteristics as friendly human-computer interaction,stable structure and small errors.Furthermore,it provides the reference for the scheme decision,parameter selection,analysis of test data of the axis aircraft system design.
Key words:STM32F103ZET6;3D angle sensor;MOS tube full bridge drive;hollow cup motor
猜你喜欢
防爆电机(2022年1期)2022-02-16
中学生数理化(高中版.高考理化)(2021年9期)2021-11-05
鸭绿江·华夏诗歌(2021年10期)2021-05-12
科学与财富(2018年30期)2018-12-28
新课程·中旬(2018年7期)2018-10-26
山东工业技术(2016年15期)2016-12-01
山东工业技术(2016年15期)2016-12-01
计算机应用(2016年9期)2016-11-01
作文教学研究(2016年1期)2016-07-05
体育科技(2016年2期)2016-02-28
