直流电机双闭环调速控制系统的技术研究
2016-08-01 14:58荣军李一鸣万军华万力张志湖南理工学院信息与通信工程学院湖南岳阳414006湖南理工学院计算机学院湖南岳阳414006工程车辆轻量化与可靠性技术湖南省高校重点实验室长沙410014
湖南理工学院学报(自然科学版) 2016年2期
荣军,李一鸣,万军华,万力,张志(1.湖南理工学院信息与通信工程学院,湖南岳阳414006;2.湖南理工学院计算机学院,湖南岳阳414006;3.工程车辆轻量化与可靠性技术湖南省高校重点实验室,长沙410014)
直流电机双闭环调速控制系统的技术研究
荣军1,3,李一鸣2,3,万军华1,3,万力1,3,张志1,3
(1.湖南理工学院信息与通信工程学院,湖南岳阳414006;2.湖南理工学院计算机学院,湖南岳阳414006;3.工程车辆轻量化与可靠性技术湖南省高校重点实验室,长沙410014)
直流调速系统具有静差率小、调速范围广、稳定性好等特点以及良好的动态性能,在生产中发挥着重要的作用.本文首先介绍了直流电机结构和工作原理,研究了双闭环PID调速控制技术,并在此基础上推断出直流电机双闭环PID直流调速控制系统的数学模型.然后依据反馈控制理论基础,在Matlab/Simulink中建立了晶闸管-电动机调速系统和PWM-直流电动机双闭环调速的仿真模型,并进行了仿真,仿真结果均能满足系统的快速性和稳定性要求.对比这两种调速系统,晶闸管-电动机调速系统在调速性能和可靠性方面具有优越性,而PWM-直流电动机双闭环调速系统动态响应速度快,而且电动机转矩平稳,脉动小.
直流调速;双闭环控制;晶闸管直流调速;PWM-M调速;建模与仿真
引言
直流电动机具有良好的起动和制动性能,容易在广泛范围内平滑调速,因此在要求高性能可控电力拖动的领域中,得到了非常广泛的应用[1,2].随着控制技术的飞速发展,各种先进控制技术已经应用到直流电机中,使得直流电机调速在高精度应用场合也得到了广泛的应用.比如文[3[在直流电机控制中应用模糊PI控制智能控制,它具有的优点是电机调速具有动态性能好,无超调、鲁棒性强和抗干扰能力好的特点,但是缺点是控制算法复杂,在实际设计中很难操作.文[4[运用“类等效”方法,首先将直流电机简化成一个简单的具有非线性特征的状态空间模型,然后利用改进的遗传算法对该模型参数进行精确辨识来对电机进行控制,虽然相比较传统的闭环控制系统调速方式,其参数辨识度比较高,但是作者仅通过仿真验证了其算法,在实际设计中还没有具体实现.文[6[运用无模型自适应控制方法,想法很好,同样仅仅应用在仿真中,实际应用比较难.目前在直流电机调速众多应用场合中,各种双闭环控制系统的调速还是占大多数,它具有设计简单,易于实现,而且生产成本低的优点.因此本文研究了几种简单的双闭环调速控制系统,相比较其它复杂调速控制系统,对直流电机的应用更有现实借鉴意义.
1 直流电机调速原理及调速指标
1.1 直流电机调速原理介绍
直流电动机是一种将电能转化为机械能的装置,驱动生产机械运转进行生产.对于负载的不同,通常要求电动机的转速在一定范围内可调节,尽量使调节范围大一些,且调速方法简单、经济.在调速方面,直流电动机就具有良好性能.为了研究方便,本文以他励直流电动机为例,其转速n与其他量的关系为[6]:

其中n为转速(r/min);Ia为电枢电流(A);Ua为电枢电压(V);CE为由电机结构决定的电动势常数;R为电枢回路总电阻(Ω);Φ为励磁磁通(Wb).
由式(1)可知,CE为常量,电枢电流由负载决定,因此直流电动机的调速有三种方法:第一,改变电枢电压;第二,通过改变励磁电流来改变励磁磁通;第三,改变电枢电阻.对于一定范围的无级调速系统,改变电枢电压是最好的方法.改变电枢电阻只能实现有级调速;通过改变励磁电流来改变励磁磁通调速,虽然能够实现平滑调速,但是调速范围不大.因此对于自动控制的直流调速系统,一般是改变电枢电压调速.
1.2 直流电机调速指标
对于调速系统控制要求如下:(1)允许在最高转速和最低转速之间,分档和平滑地调速;(2)在一定的精度范围内,稳定运行在设定的转速上;(3)对于频繁起动、制动的设备,要求加速、减速迅速,节约时间,提高生产效率.为了定量分析,定义了直流电机的两个调速系统稳态指标,分别为调速范围D和静差率s.
(1)调速范围
生产机械所要求电动机的最小转速和最大转速的比值定义为调速范围.调速范围用字母D表示,即其中maxn和minn分别为电动机运行额定负载状态下最大转速和最低转速.

(2)静差率
系统处在某一转速情况下运行时,负载从理想空载到额定负载时转速的降落为NnΔ,则NnΔ与理想空载转速0n之比称为静差率s,即

显然,静差率是用来衡量调速系统的稳定度的.它与机械特性的硬度有关,静差率越小,机械特性越硬,转速的稳定程度越高.
2 直流电机双闭环PID调速控制系统数学模型的推导以及建模和仿真
2.1 双闭环PID调速系统主电路数学模型
在额定励磁作用下,直流电动机的数学描述假定电流连续,则

感应电动势为

电磁转矩为

在不考虑粘性摩擦,根据牛顿动力学定律,有

其中TL为负载转矩(包括电动机空载转矩);GD2为拖动系统运动部分等效到电机转轴上的飞轮转矩;C=为在额定励磁下,电动机的转矩电流比.m
定义如下时间常数:

其中mT为电机转矩时间常数.
整理可得

当处于零初始条件下,对式(9)和(10)进行拉斯变换,则电流与电压的传递函数为

电流与电动势之间的传递函数为

根据式(11)和(12)的传递函数,可得在额定状态下直流电机动态结构图如图1所示[10].
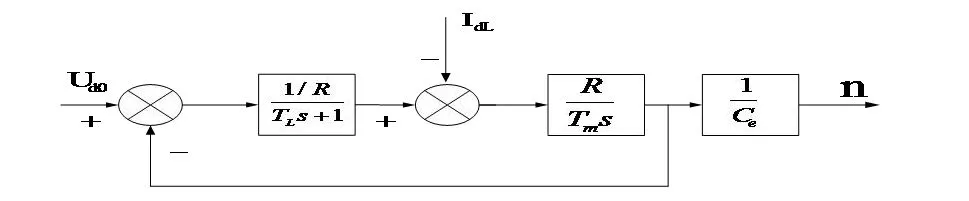
图1 直流电机动态结构图
2.2 双闭环PID调速系统动态数学模型
图2为双闭环直流调速系统的动态结构原理图,其中WASR(s)、WACR(s)分别为转速调节器和电流调节器的传递函数.
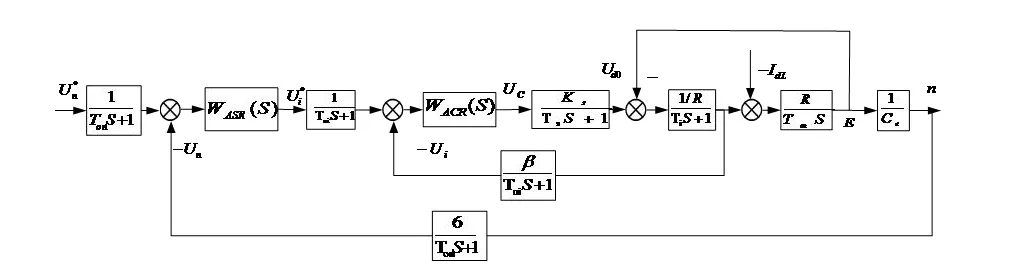
图2 双闭环直流调速系统的动态结构原理图
根据图2可以在MATALB/Simulink中建立直流电动机双闭环调速系统的仿真模型,如图3所示.在各个环节上,仿真模型和系统动态结构图基本上是一一对应的,特别的是需要注意的是,双闭环系统的转速调节器(ASR)和电流调节器(ACR)都是具有饱和特性和带输出限幅的PI调节器.为了使其在饱和限幅非线性影响下,充分反映调速系统的工作情况,因此需要考虑构建饱和输出限幅的PI调节器.过程简述如下:线性PI调节器的传递函数为

其中Ki为积分系数,KP为比例系数,τ=KPKi.对于上述的PI调节器的传递函数,可以直接应用SIMULINK中的零极点模块或传递函数.
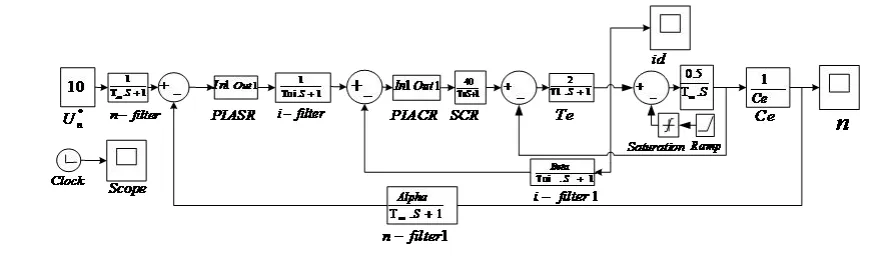
图3 直流双闭环调速系统在MATLAB中的仿真模型
2.3 仿真结果及分析
根据图3所示的直流双闭环调速系统仿真模型,给出具体的数值仿真模型如图4所示,其仿真结果如图5和图6所示.
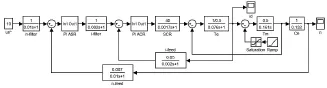
图4 直流调速在MATLAB中的数值仿真模型

图5 开环和闭环控制情况下转速响应和电流响应曲线
开环、闭环调速系统转速响应和电流响应曲线如图5所示.从图5可以清晰看出闭环调速系统的转速超调量小、电枢电流平滑,而开环调速系统的起动过程电流过大,经常在此情况下直接起动容易造成电动机的损坏.
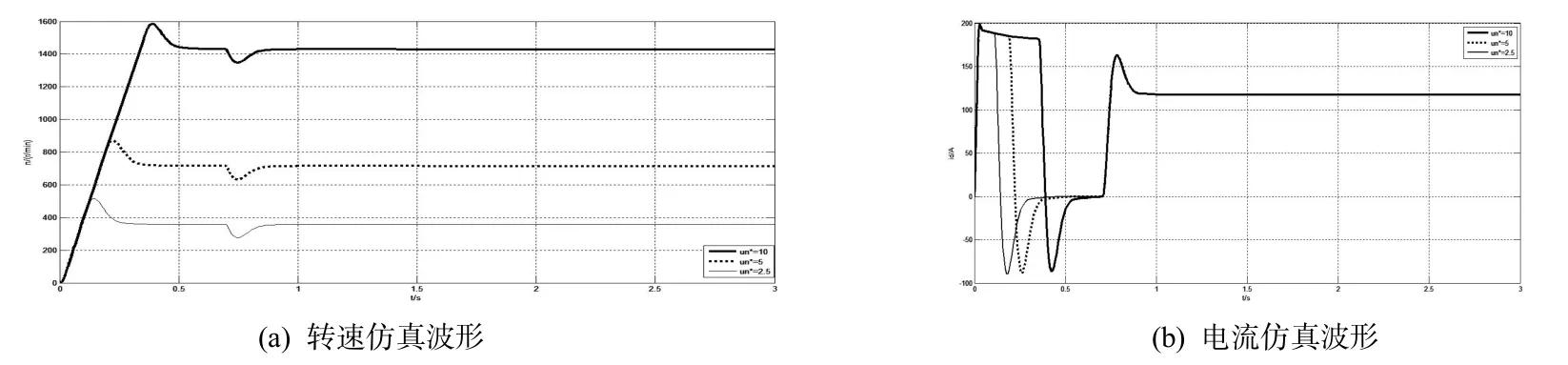
图6 不同给定电枢参考电压10V、5V、2.5V情况下转速和电流响应曲线
3 两种典型的双闭环调速系统比较研究
3.1 晶闸管直流双闭环调速控制系统建模与仿真
晶闸管直流电动机双闭环调速控制系统在MATLAB中的仿真模型如图7所示[7].主要由交流电源、晶闸管整流器、移相控制环节、触发器和电动机模块构成,其中控制电路由转速调节器(ASR)和电流调节器(ACR)组成.其仿真结果如图8和图9所示.
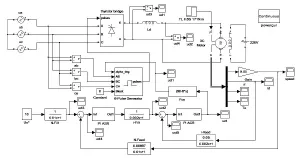
图7 晶闸管直流双闭环调速系统的仿真模型

图8 晶闸管调速系统开环和闭环控制情况下的电流和转速响应曲线
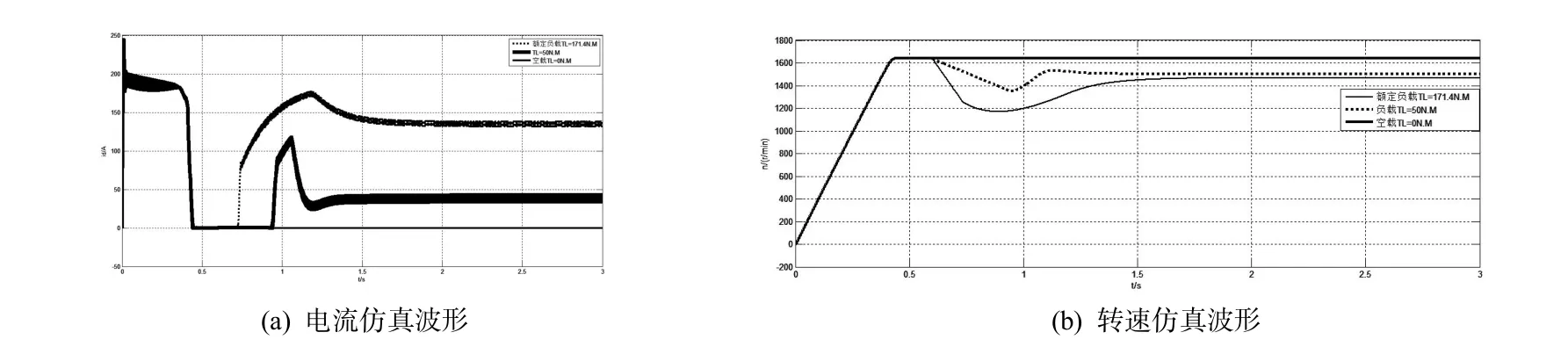
图9 电动机额定负载分别为TL=171.4N.M、TL=50N.M和空载时电流和转速响应波形
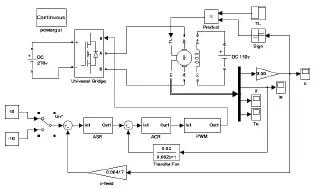
图10 双极式控制电流PWM-M调速系统仿真模型

图11PWM调速系统在开环和闭环控制情况下的电流和转速响应曲线
图8 为开环和闭环控制下的电流和转速仿真波形,图9为不同负载下的电流和转速仿真波形.从图8(a)和图9(a)可以看出,不论是开环还是闭环,电枢电流都经历了上升、下降、保持稳定的过程.从图8(b)可以看出,在相同的负载情况下,双闭环与开环相比,其超调量小,而且调速精度高.从图9可以看出,双闭环调速系统在不同的负载下,静差率小,调速范围比较广.
3.2 双极式PWM-M双闭环调速控制系统建模与仿真
双极式PWM-M双闭环调速控制系统在MATLAB中的仿真模型如图10所示[8].在转速和电流控制方面,PWM-直流电动机调速与晶闸管直流调速系统是一样的,它们之间的区别在于主电路变流上,采用了脉宽调制技术.其仿真结果如图11、图12和图13所示.其中图11为开环和闭环控制下的电流和转速仿真波形,图12为不同负载下的电流和转速仿真波形,图13为PWM-M调速和晶闸管直流电流闭环控制对比仿真波形.从图11可以看出,在相同的负载情况下,双闭环与开环相比,其超调量小、调速精度高.从图12(a)可以看出在不同的负载情况下,PWM-M调速系统静差率小,从图12(b)可以看出PWM-M调速可以实现双极调速.从图13可以看出,PWM-M调速系统和晶闸管调速系统相比,PWM-M调速系统更精确调速、平滑性更好.

图12 PWM调速系统在空载和负载情况下电动机电枢电流和转速响应波形

图13 晶闸管和PWM-M调速系统闭环调速仿真波形
4 结论
本文首先推断了直流电机调速的数学公式,根据其调速指标最终选择改变电枢电压来调速.然后根据直流电机的工作原理,建立电机数学模型,设计了双闭环PID调速控制控制系统.双闭环控制调速系统的特点是由两个独立的调节器,一个是转速调节器(ASR),另一个是电流调节器(ACR),电流环为内环,转速环为外环;而且转速调节器的输出是电流调节器的输入,因此电流调节器能够随转速的偏差改变电动机电枢电流.并在此基础上推断出直流电机双闭环PID直流调速控制系统的数学模型;最后根据反馈控制理论基础,在Matlab/Simulink中建立了晶闸管调速系统和PWM-M调速系统仿真模型,并进行了仿真.通过对仿真结果的比较分析可知,闭环系统比开环系统调速精确性和快速性更好,另外PWM-M双闭环调速系统比晶闸管直流调速系统精确度更高,且平滑性更好.
[1[田红霞.单周期控制直流电机双闭环调速系统设计[J[.煤矿机械,2014,35(06):24~25
[2[荣军,丁跃浇,张敏.对转永磁无刷直流电机建模与仿真[J[.湖南工业大学学报,2010,24(5):33~36
[3[纪志成,沈艳霞.姜建国.一种新型的无刷直流电机调速系统的模糊PI智能控制[J[.电机与控制学报,2003,7(3):248~254
[4[李永龙,李祖枢,王牛.直流电机双闭环调速系统(DLM)的建模与辨识[J[.控制理论与应用,2008,25(6):1077~1080
[5[曹荣敏,侯忠生,白雪峰.基于无模型自适应控制方法的直流电机调速系统[J[.电气传动,2008,38(7):26~30
[6[唐介.电机与拖动[M[.第2版.北京:高等教育出版社,2007
[7[方炜,张辉,刘晓东.无刷直流电机双闭环控制系统的设计[J[.电源学报,2014,3(2):35~42
[8[谢志诚,李益华,林利红.无刷直流电机双闭环控制系统的建模与仿真[J[.计算技术与自动化,2009,28(3):41~44
RONG Jun1,3,LIYi-ming2,3,WAN Jun-hua1,3,WAN Li1,3,ZHANG Zhi1,3
(1.College of Information and Communication Engineering,Hunan Institute of Science and Technology,Yueyang 414006,China;2.College of Computer Science,Hunan Institute of Science and Technology,Yueyang 414006,China;3.Key Laboratory of Lightweightand Reliability Technology for Engineering Vehicle,College of Hunan Province,Changsha 410014,China)
There are static rate of small,wide speed range,good stability and a good dynamic performance in DC speed regulation system,and itplays an importantrole in the production.Firstly the paper introduced the DC motor structure and working principle of the double closed-loop PID control of motor speed control technology,and on this basis the paper deduced the double closed-loop PID control system of DC speed-regulating mathematical model for DC motor.Based on feedback control theory it established the simulation models of thyristor DC speeding system and PWM-DC motor double closed-loop speeding system based on Matlab/Simulink,and its simulations were carried out.Through the analysis of simulation results,there can all satisfy the demands of system speediness and stability.Comparing with the another two kinds of speed regulation systems,thyristor DC driving system has superiority in speed regulating performance and reliability,and PWM-DC motor double closed-loop speed regulation has dynamic response speed,smooth and motor torque ripple is small,so itprovides a valuable reference for the practical application of DC motor.
DC regulating speed,double closed-loop controlsystem,thyristor DC regulating speed,PWM-M regulating speed,modeling and simulation
TP341
A
1672-5298(2016)02-0047-06
2016-03-12
工程车辆安全性设计与可靠性技术湖南省高校重点实验室基金资助项目(2014kfjj01,KF1608);2015年湖南省教育厅一般项目(15C0620,15C0622)
荣军(1978-),男,湖南岳阳人,硕士,湖南理工学院信息与通信工程学院讲师.主要研究方向:开关电源和电机控制技术
猜你喜欢
四川电力技术(2022年6期)2023-01-31
现代信息科技(2022年20期)2022-11-17
弹道学报(2022年3期)2022-10-08
电气电子教学学报(2022年3期)2022-07-30
火力与指挥控制(2022年5期)2022-07-25
燃料化学学报(2022年5期)2022-05-30
弹箭与制导学报(2020年1期)2020-07-09
舰船电子工程(2019年11期)2019-11-28
弹箭与制导学报(2019年6期)2019-06-24
海军航空大学学报(2015年1期)2015-11-11