
汽车电泳涂装输送用新型混联机构的动力学控制
2016-08-16 07:09高国琴范杜娟方志明
中国机械工程 2016年8期
高国琴 范杜娟 方志明
江苏大学,镇江,212013
汽车电泳涂装输送用新型混联机构的动力学控制
高国琴范杜娟方志明
江苏大学,镇江,212013
由于汽车电泳涂装输送用新型混联机构存在高度非线性和耦合性,因此难以实现高性能控制。为此,首先采用拉格朗日法推导该机构的动力学模型。然后,在任务空间设计一种PD滑模神经网络动力学控制器并进行稳定性证明。最后,对该控制器进行了仿真,并将所得结果与PD滑模控制器仿真结果进行比较。比较结果表明:该动力学控制器通过神经网络前馈控制的作用有效解决了PD滑模控制器存在的剧烈抖振问题,使得汽车电泳涂装输送控制系统呈现良好的控制性能。
混联机构;动力学模型;滑模控制;神经网络控制
0 引言
现有的汽车电泳涂装输送系统存在无法实现车体完全涂装和柔性化水平不高的问题[1]。混联机构是将串并联机构合理结合应用的一类机构,不仅可弥补串联机构在刚度、精度、实时控制等方面的不足,而且可克服并联机构工作空间小、运动不灵活的缺点[2-4]。本课题组将混联机构引入汽车电泳涂装输送系统,研制了一种新型汽车电泳涂装输送用混联机构[5]。
混联机构的运动控制方法主要可分为运动学控制方法与动力学控制方法[6-10]。相对于运动学控制方法,动力学控制方法由于考虑了机构运动过程中的非线性动力学特性和力耦合特性,因此在理论上可具有更好的控制性能[7,9],但动力学控制方法的控制效果依赖于动力学模型的准确性。由于混联机构所含并联机构为闭链结构并存在运动学约束,因此其动力学模型往往较为复杂。另外,实际控制系统,如汽车电泳涂装输送系统,常常存在模型误差和外界扰动,因此难以建立混联机构的精确动力学模型。直接基于逆动力学模型设计控制器的计算量较大,难以满足实时控制要求;传统的动力学控制方法,如PD控制,算法简单、计算量小、实时性好,但一般不能有效解决非线性系统模型误差和外界扰动问题[11-13],鲁棒性较差。
针对实现混联机构动力学控制的上述问题,学者们提出了鲁棒控制方法和智能控制方法[9-12]。鲁棒控制方法中,滑模控制对系统模型误差和外界扰动具有鲁棒性,且易于实现,但存在抖振问题,抖振严重时难以用于实际工程。智能控制方法中,神经网络动力学控制能学习与适应不确定系统动态特性,充分逼近任意复杂的非线性映射,且不依赖于动力学参数,并可避免复杂的逆动力学计算,提高了控制系统实时性,但由于是以神经网络(神经网络担负着全部的控制器任务)实现逆动力学计算的,因此对神经网络初始权值的设置提出了较高要求,且难于根据可测量量调整神经网络连接权。当出现不确定干扰时,神经网络对逆系统的逼近能力下降,影响系统控制性能[14]。针对本课题组新研制的汽车电泳涂装输送用混联机构的结构特点以及汽车电泳涂装输送工艺要求,为进一步提高其控制性能,提出一种PD滑模神经网络动力学控制方法,即通过神经网络实现混联机构的逆动力学前馈控制,同时通过PD控制实现反馈控制,再通过滑模控制增强混联机构系统对模型误差和外界干扰的鲁棒性,构成一种新的PD+滑模+神经网络的复合动力学控制方式。
1 运动学分析及动力学建模
1.1运动学分析
如图1所示,新型汽车电泳涂装输送用混联机构主要由行走机构与升降翻转机构两部分构成,这两部分机构的控制相对独立。行走机构通过同步驱动行走轮,实现输送机的行走平移,其控制相对简单。作为主体机构的升降翻转机构为并联机构,相对较为复杂,且对输送性能的影响较大,因此本文着重研究升降翻转机构。
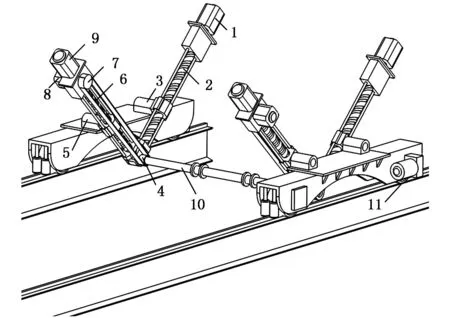
1.第一驱动器 2. 第一丝杠 3. 第一转动副4.从动轮 5.第二转动副 6.第二丝杠 7.主动轮8.第三驱动器 9.第二驱动器 10.连接杆 11.行走轮图1 新型汽车电泳涂装输送机构
如图2所示,升降翻转机构结构由2个结构完全相同的第一平面多杆机构与第二平面多杆机构构成,为对称机构,由此,本文针对其单边机构进行运动学分析与动力学建模。
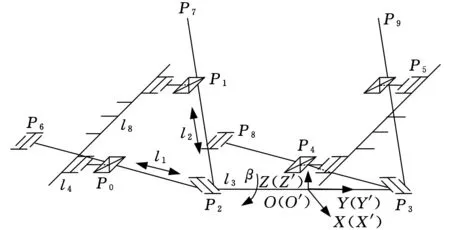
图2 升降翻转机构结构简图
采用杆长长度约束方程,建立该混联机构的运动学方程,整理可得其运动学逆解:
(1)
式中,x为连接杆中点在X方向上的位移分量;z为连接杆在Z方向上的位移分量;β为连接杆中点绕Y轴转过的角度;li(i=1,2)为滑块P0、P1的移动量;l4为第一连杆和第二连杆的长度(二者相同);l8为第一、第二转动副之间的固定距离;φ为主动轮绕Y轴逆时针转动的角度。
选择连接杆中点的位姿参数q=[xzβ]T为系统广义坐标,采用基于符号运算的微分变换法求解混联机构的雅可比矩阵,具体求解方法如下。
将式(1)两端分别对时间求导并整理得
(2)
1.2动力学建模
采用拉格朗日法建立该混联机构的动力学模型。分别求取车体、支链、动平台支架、滑块、主动轮、从动轮的动能与势能,根据拉格朗日方程:
(3)
整理并建立标准动力学方程:

(4)
为了将广义驱动力转化为关节驱动力,作如下变换:
Q=JTτ
(5)
式中,J为混联机构的雅可比矩阵;τ为关节驱动力向量。
为使动力学模型更加切合工程实际, 进一步考虑系统摩擦力及外部干扰后,得到如下形式的机构动力学模型:
(6)
D(t)=umcosωt[111]T
qa=[qa1qa2φ1]T

2 动力学控制器设计及神经网络构建
2.1PD滑模神经网络动力学控制器设计

(7)
PD滑模神经网络控制系统结构如图3所示,其控制律设计为
τ=τfb+τff+τsm
(8)
式中,Kp、Kd、τ均为对称正定矩阵;τfb为常规PD反馈控制项;τff为神经网络控制项;τsm为滑模控制项;εm取神经网络拟合误差的上界值,用来增强系统的鲁棒性。
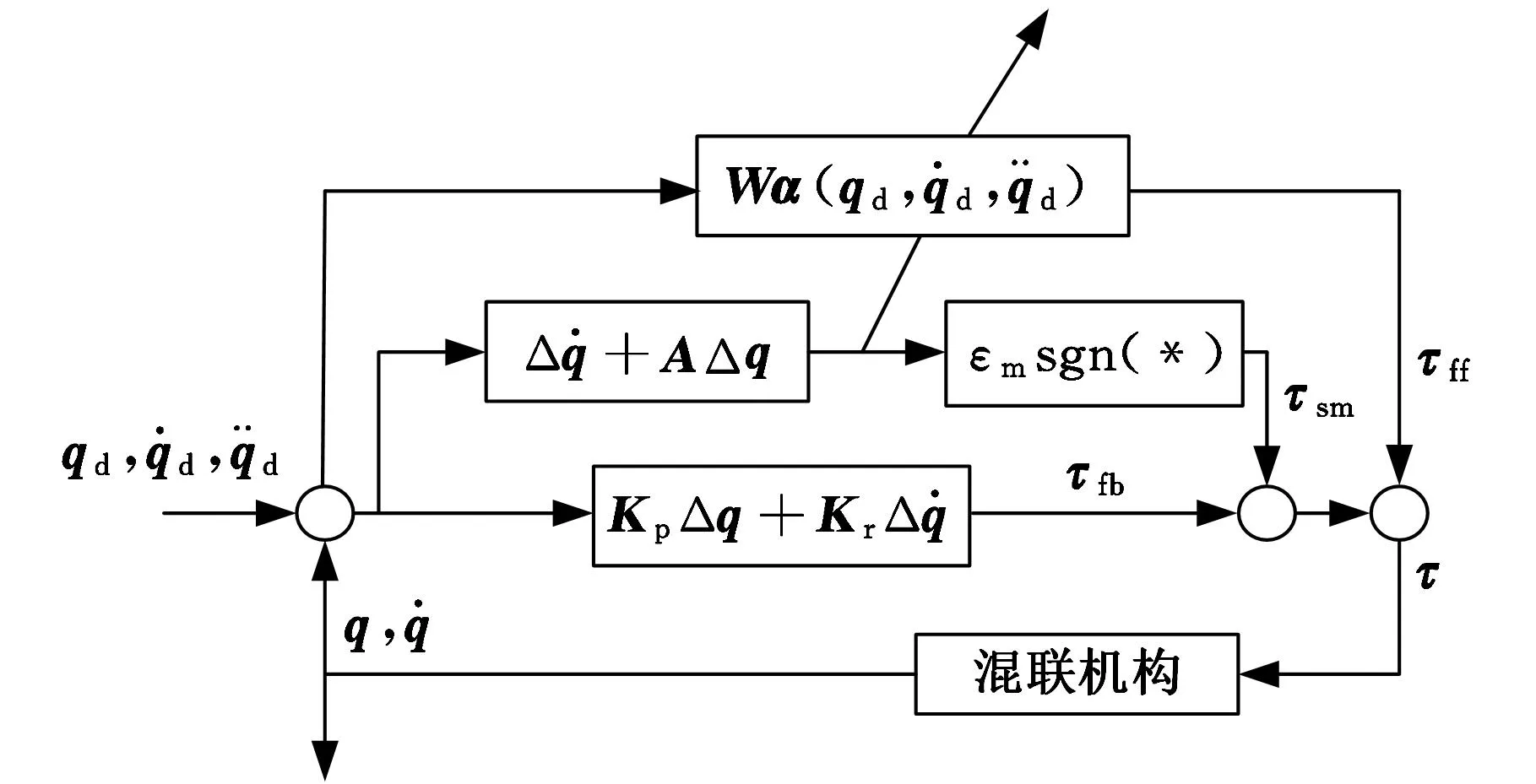
图3 PD滑模神经网络动力学控制系统结构图
滑模面设计为
(9)
其中,A可逆,a1、a2、a3均为可调参数并满足霍尔伍兹条件。
滑模控制取等速趋近率:
(10)
k1,k2,k3>0
下面证明所设计PD滑模神经网络动力学控制算法的稳定性。
将式(8)代入式(6)并整理可得
(11)
定义Lyapunov函数为
V=STS/2=[s1s2s3][s1s2s3]T/2
(12)
对式(12)求导可得
(13)
定义
(14)
将式(14)代入式(13)得
(15)

根据Lyapunov稳定性定理,可见基于动力学模型所设计PD滑模神经网络控制算法稳定。
2.2神经网络构建
BP神经网络可以逼近任意非线性映射关系,属于全局逼近方法,具有较好的泛化能力[17],故本文采用BP神经网络实现对混联机构的前馈控制。构建该神经网络的步骤如下:
(1)确定BP神经网络结构。依据所建立的混联机构动力学模型,确定BP神经网络输入量、输出量分别为混联机构连接杆中点的位姿向量与混联机构各主动副驱动力/力矩,因此对应神经网络输入层和输出层均有3个节点。为提高神经网络精度,在输入层与输出层间设计有一个包含16个神经元节点的隐层。

(3)设定BP神经网络各参数。在训练BP神经网络之前,需要设定神经网络各层的传递函数、训练函数、权值/阈值、学习函数、最大训练次数、训练目标误差等。文中,最大训练次数设定为30 000,目标误差设为10-10,其余参数均采用默认设置。
(4)训练BP神经网络。完成以上3个步骤以后,采用MATLAB中的train函数对网络进行训练,6540次后训练误差收敛,其训练收敛过程如图4所示。

图4 BP神经网络训练收敛过程
训练后的神经网络输入层到隐层权值为
隐层节点与输出层节点之间的连接权值如表1所示。
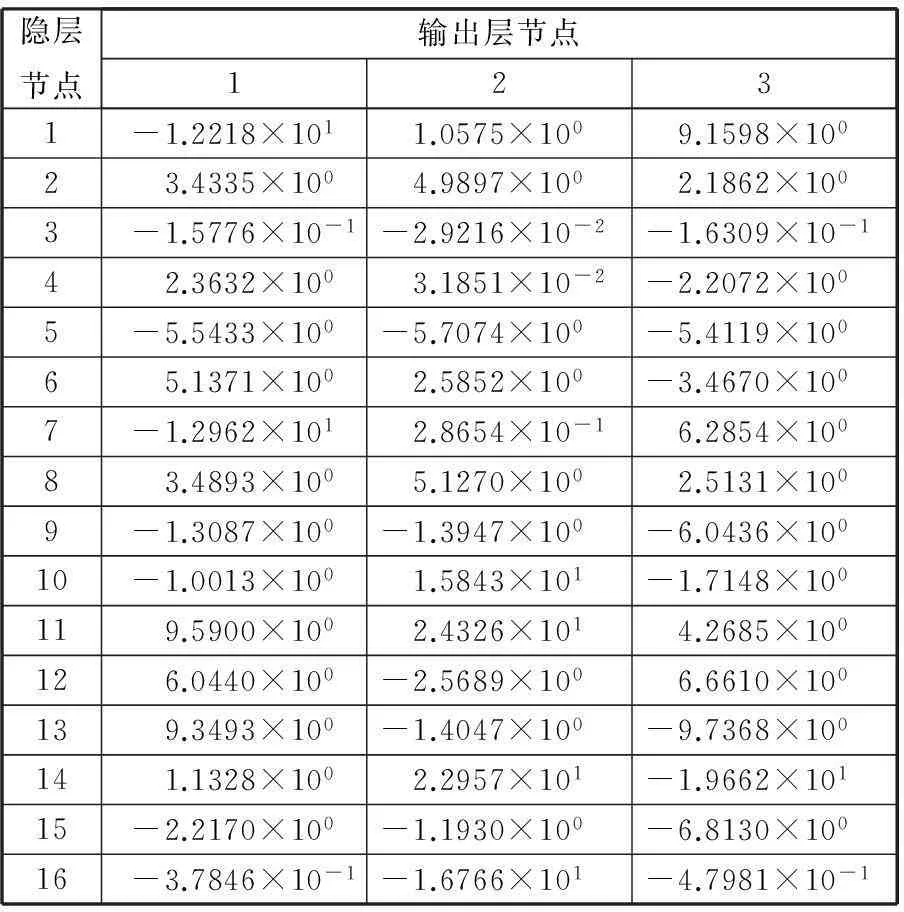
表1 隐层节点与输出层节点之间的连接权值
隐层阈值为
T1=[0.561 30-0.197 42-0.666 95]T
输出层阈值为
T2=[t1t2…t16]T
t1=7.6352×100t2=-3.3733×100
t3=5.8457×10-1t4=5.7351×100t5=4.5847×100
t6=-5.9803×100t7=4.2038×100
t8=-3.6879×100t9=3.5925×100t10=6.3004×100
t11=-5.4450×100t12=-4.7982×10-2
t13=-5.3814×100t14=6.4484×100
t15=3.4360×100t16=-6.0158×100
神经网络隐含层神经元的传递函数采用S型函数2/(1+e-2x)-1,输出层神经元采用线性函数。
3 仿真实验及结果分析
根据1.2节建立的混联机构(参数如表2所示)动力学模型(式(6)),采用MATLAB进行仿真。由于本文控制方法含有滑模控制作用,可提高系统对外部干扰及参数变化的鲁棒性,因此根据文献[15],可确定黏度系数矩阵Bc=diag(0.6,0.6,0.9)(N·m),库仑摩擦力矩阵Fc=diag(3.7,3.7,4.3)(N·m),根据文献[16],可确定um=0.04,ω=3。
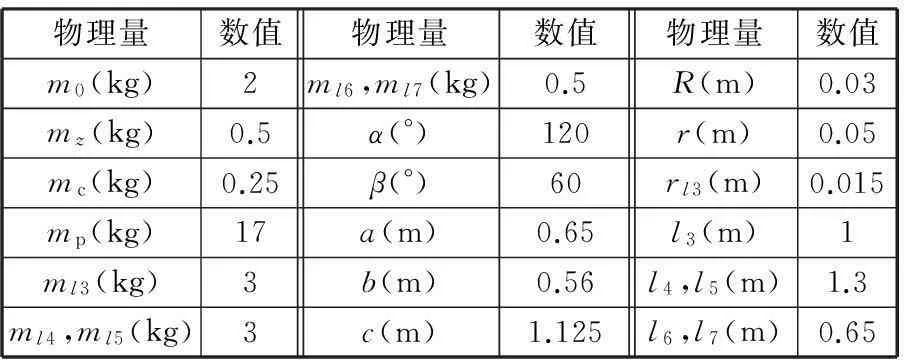
表2 混联机构参数
根据汽车电泳涂装工艺要求,输送设备需输送白车身完成先翻转入槽、再在槽中作小幅正弦运动、最后翻转出槽的运动过程,据此确定升降翻转机构连接杆中点的期望运动轨迹:
qd=[x(t)z(t)β(t)]T
(16)
x(t)=0.1t0≤t≤9

(17)

(18)
式中,t为时间,s。
对于图3所示动力学控制系统,为了验证引入BP神经网络对提高系统实时性的有效性,以式(16)~式(18)所示期望运动轨迹为输入,利用MATLAB中的“tic”、“toc”指令分别测试逆动力学模型从输入到输出的计算时间和神经网络从输入到输出的计算时间,结果显示:前者仿真用时95ms,后者仿真用时49ms。由此可见,与直接采用逆动力学模型控制的方法相比,采用BP神经网络实现混联机构前馈控制可有效提高计算效率,从而提高控制系统实时性。
为验证所设计控制算法的正确性和有效性,以混联机构的动力学模型(式(6))为被控对象数学模型,分别采用PD滑模控制器(去除图3中的神经网络控制项τff)和PD滑模神经网络控制器(式(8)),对系统跟踪期望运动轨迹的跟踪控制过程进行了仿真实验。两种控制器的性能通过仿真调试达到最优,确定PD滑模控制器中的参数:
Kd1=diag(10 030,10 030,15 320)
Kp1=diag(904 050,904 050,1 017 020)
εm1=0.1
PD滑模神经网络控制器中的参数:
Kd2=diag(15 000,12 000,19 000)
Kp2=diag(100 000,807 500,1 000 000)
εm2=0.0099
图5所示为PD滑模控制器和PD滑模神经网络控制器作用下,混联机构连接杆中点位姿各分量的轨迹跟踪曲线。
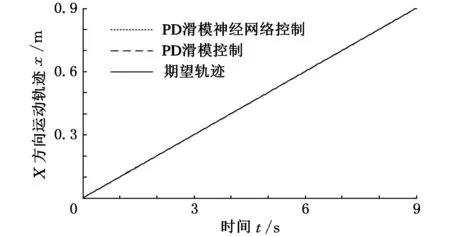
(a)x方向跟踪曲线
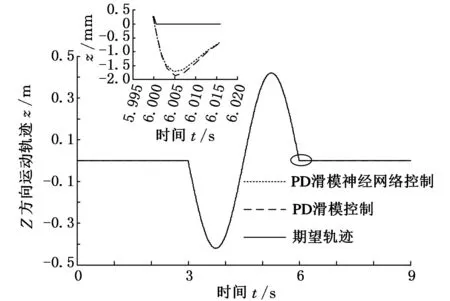
(b)z方向跟踪曲线
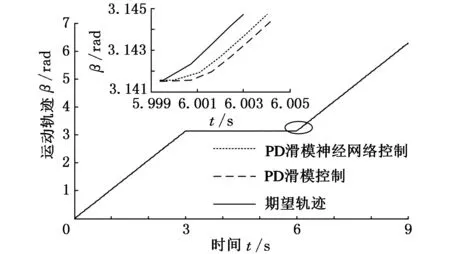
(c)β跟踪曲线图5 混联机构连接杆中点位姿分量轨迹跟踪曲线
由图5可见,PD滑模控制器与PD滑模神经网络控制器作用下,混联机构连接杆中点位姿的轨迹跟踪性能差异并不明显,这是因为二者通过仿真已调试到最优性能。
(a)第一驱动器
(b)第二驱动器
(c)第三驱动器图6 PD滑模控制器作用下的滑模控制分量曲线

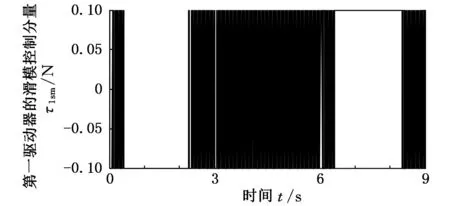
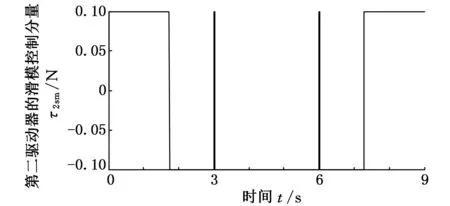
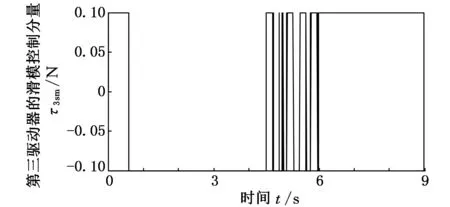
(a)第一驱动器

(b)第二驱动器
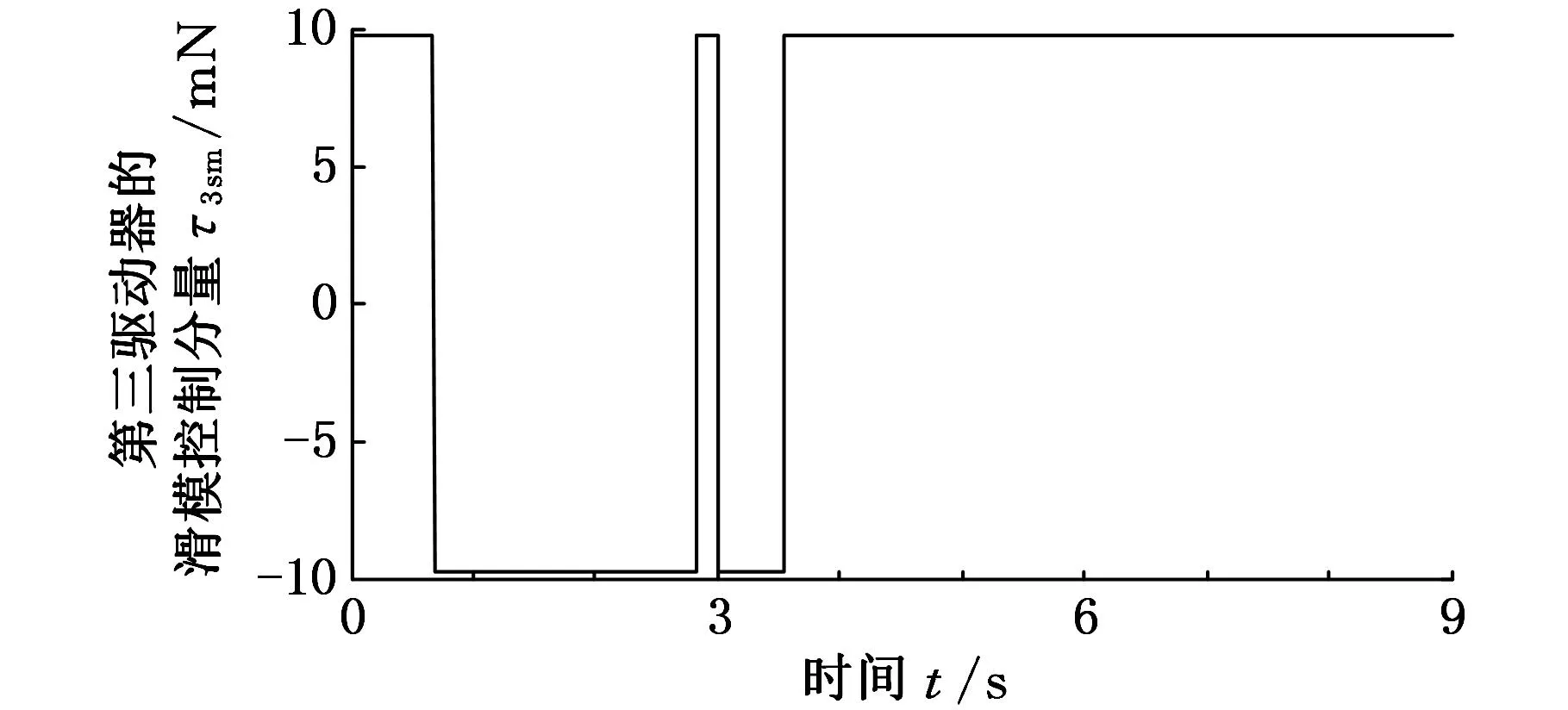
(c)第三驱动器图7 PD滑模神经网络控制器作用下的滑模控制分量曲线
图6为在PD滑模控制器作用下的滑模控制分量曲线图,图7为在PD滑模神经网络控制器作用下的滑模控制分量曲线图。比较图6、图7可以看出,采用PD滑模控制器时,各主动关节驱动力/力矩的滑模控制分量明显大于采用PD滑模神经网络控制器时各主动关节驱动力/力矩的滑模控制分量,且控制分量抖振的幅度和频度均明显较强,第一驱动器的滑模控制分量抖振较为严重,这与期望运动轨迹有关,且由混联机构的动力学特性决定。由此可见,对于汽车电泳涂装输送实际工程系统来说,采用PD滑模控制器时,其滑模控制分量的抖振幅度较大、频度较高,因此容易磨损执行机构,缩短执行机构寿命,并难以获得预期控制性能。与此对比,本文所提出的PD滑模神经网络控制器,由于具有神经网络的逆动力学前馈控制,无需PD滑模控制担负全部的控制任务,因此其滑模控制分量无需以较大的切换增益保证滑模运动的存在及其鲁棒性,从而可有效抑制滑模控制抖振,避免对执行机构的不利影响,并能使控制系统呈现良好的控制性能,更好地实现对汽车电泳涂装输送用新型混联机构的高性能控制。
4 结论
(1)提出一种PD滑模神经网络动力学控制方法。基于所建立动力学模型,在任务空间内设计了该混联机构的PD滑模神经网络控制器,并从理论上证明了所设计控制算法的稳定性。
(2)分别采用PD滑模控制器和PD滑模神经网络控制器,对系统跟踪期望运动轨迹的性能进行了仿真对比实验。实验结果表明:引入神经网络前馈控制后,所提出PD滑模神经网络控制器有效解决了PD滑模控制器存在的剧烈抖振问题,使得新型汽车电泳涂装输送控制系统呈现良好的控制性能。
[1]李文刚. 先进的汽车涂装设备[J]. 汽车工艺与材料, 2012(2): 46-50.
Li Wengang. Advanced Automobile Coating Equipment[J]. Automobile Technology & Material, 2012(2): 46-50.
[2]沈惠平,赵海彬,邓嘉鸣,等. 基于自由度分配和方位特征集的混联机器人机型设计方法及应用[J]. 机械工程学报, 2011, 47(23): 56-64.
Shen Huiping,Zhao Haibin,Deng Jiaming,et al. Design Method and Application of Hybrid Robot Model Based on the Distribution of Degrees of Freedom and the Azimuth Feature Set[J]. Journal of Mechanical Engineering, 2011, 47(23): 56-64.
[3]王燕伟. 一种五自由度混联机器人的运动学分析与仿真[D]. 哈尔滨:哈尔滨工业大学, 2013.
[4]洪振宇, 张志旭, 许致华. 一种新型三自由度混联机构基于刚度性能的尺度综合方法[J]. 中国机械工程, 2014, 25(5) : 619-623.
Hong Zhenyu, Zhang Zhixu, Xu Zhihua. Dimensional Synthesis of a Novel 3-DOF Hybrid Manipulator Based on Stiffness[J]. China Mechanical Engineering, 2014, 25(5): 619-623.
[5]刘辛军, 陈祥, 高国琴. 一种三自由度汽车涂装输送机[P]. 中国:CN102817064A, 2012-12-12.
[6]张耀欣, 丛爽. 平面二自由度冗余驱动并联机构的最优运动控制及其仿真[J]. 系统仿真学报, 2005, 17(10): 143-147.
Zhang Yaoxin, Cong Shuang. The Optimum Motion Control and Simulation of Planar Two-DOF Redundant Actuation Parallel Mechanism[J]. Journal of System Simulation,2005, 17(10): 143-147.
[7]宗朝. 不确定二自由度冗余并联机器人控制方法研究[D]. 南京:南京理工大学, 2013.
[8]尤晶晶,李成刚,吴洪涛. 基于四面体构型的冗余并联机构的运动学分析[J]. 中国机械工程, 2013, 24(8): 1097-1101.
You Jingjing, Li Chenggang, Wu Hongtao. The Kinematic Analysis of the Redundant Parallel Mechanism Based on Tetrahedral Configuration[J]. China Mechanical Engineering, 2013, 24(8): 1097-1101.
[9]郝齐. 一种两自由度并联机构优化设计及动力学控制研究[D]. 北京:清华大学, 2011.
[10]Yu W S,Weng C C. H-tracking Adaptive Fuzzy Integral Sliding Mode Control for Parallel Manipulators[J]. Fuzzy Sets and Systems, 2014, 248: 1-38.
[11]Hacioglu Y, Arslan Y Z, Yagiz N. MIMO Fuzzy Sliding Mode Controlled Dual Arm Robot in Load Transportation[J]. Journal of the Franklin Institute, 2011, 348(8): 1886-1902.
[12]Le T D, Kang H J. An Adaptive Tracking Controller for Parallel Robotic Manipulators Based on Fully Tuned Radial Basic Function Networks[J]. Neurocomputing, 2014, 137: 12- 23.
[13]敖银辉. 平面并联机构的自适应控制方法研究[J]. 中国机械工程, 2010, 21(7): 835-838.
Ao Yinhui. Research on Adaptive Control for a Planar Parallel Mechanism[J]. China Mechanical Engineering, 2010, 21(7): 835-838.
[14]孙增圻, 邓志东,张再兴. 智能控制理论与技术[M]. 北京:清华大学出版社, 2007.
[15]尚伟伟. 平面二自由度并联机器人的控制策略及其性能研究[D]. 合肥:中国科学技术大学, 2008.
[16]Isidori A. Nonlinear Control System[M]. Berlin: Spring-Verlag, 1995.
[17]李小力, 陈威, 闫蓉. 基于BP神经网络的空间轮廓误差自适应补偿[J]. 中国机械工程, 2010, 21(16): 1902-1906.
Li Xiaoli, Chen Wei, Yan Rong. Adaptive Compensation of Contour Errors Based on BP Neural Networks[J]. China Mechanical Engineering, 2010, 21(16): 1902-1906.
(编辑张洋)
Dynamics Control of a Novel Hybrid Mechanism for Automobile Electro-coating Conveying
Gao GuoqinFan DujuanFang Zhiming
Jiangsu University,Zhenjiang,Jiangsu,212013
As a novel hybrid mechanism used for automobile electro-coating conveying possessed high nonlinearity and coupling, it was difficult to achieve the high-performance control. To solve this problem, a dynamic model of the hybrid mechanism was established by Lagrange method. Then, a PD sliding mode neural network dynamics controller was designed in the task space and the stability of the controller was proved. Finally, the controller was simulated and compared with the PD sliding mode controller. The results show that the dynamics controller, by the action of feed-forward control of neural network, may solve the severe chattering problem existed in the PD sliding mode controller effectively, and may make the automobile electro-coating conveying system achieve the high control performance.
hybrid mechanism; dynamics model; sliding mode control; neural network control
高国琴,女,1965年生。江苏大学电气信息工程学院教授、博士研究生导师。主要研究方向为并联机构及其装备的控制。发表论文90余篇。范杜娟,女,1990年生。江苏大学电气信息工程学院硕士研究生。方志明,男,1978年生。江苏大学电气信息工程学院讲师。
2015-02-05
国家自然科学基金资助项目(51375210);江苏高校优势学科建设工程资助项目(苏政办发[2014]37号);镇江市工业科技支撑计划资助项目(GY2013062);镇江市京口区科技计划资助项目(jkGY2013002)
TH238
10.3969/j.issn.1004-132X.2016.08.004
猜你喜欢
湖南电力(2022年3期)2022-07-07
上海涂料(2021年5期)2022-01-15
科学大众·教师版(2021年9期)2021-09-05
北华大学学报(自然科学版)(2021年3期)2021-07-13
世界最新医学信息文摘(2021年12期)2021-06-09
电脑爱好者(2020年6期)2020-05-26
装备制造技术(2019年12期)2019-12-25
制造技术与机床(2019年7期)2019-07-22
电子制作(2018年17期)2018-09-28
北京航空航天大学学报(2017年5期)2017-11-23
