
中高速船航行姿态及阻力数值预报方法研究*
2016-08-29 04:35周广礼欧勇鹏
武汉理工大学学报(交通科学与工程版) 2016年4期
周广礼 欧勇鹏
(海军工程大学舰船工程系 武汉 430033)
中高速船航行姿态及阻力数值预报方法研究*
周广礼欧勇鹏
(海军工程大学舰船工程系武汉430033)
针对中高速船不同航速下航态变化显著的特点,基于RANS方程与重叠网格技术,提出了船舶姿态及阻力的数值预报方法.以DTMB 5415为研究对象,开展了傅氏数Fr=0.28及0.41下船模航行状态的数值模拟,计算结果表明,研究航速下,船模升沉及纵倾的预报误差可控制在4%及10%以内,阻力预报误差小于3%,同时该方法能够较为准确地捕捉船体兴波流场的细节信息,可为中高速船快速性预报提供可行途径.
中高速船;重叠网格;计算流体力学;航行姿态;阻力
0 引 言
排水型船高速航行时,船体表面压力分布与低航速下相比存在较大不同,易出现显著的升沉及纵倾,从而增加了船舶流场及阻力的预报难度.以往船舶航行姿态主要采用基于Rankine函数的势流方法进行求解[1-3],该方法忽略了流体粘性,其适用范围有限.
随着计算机性能的提高及网格技术的发展,应用粘流CFD方法预报船舶姿态已逐步得以实现.倪崇本等[4-5]分别应用动态变形网格技术对高速三体船及INSEAN 2340标模的阻力性能进行了计算,探索了计及航态下船舶阻力的预报方法,然而该方法基于弹性节点重构技术对船体周围的网格进行更新,对于姿态幅度变化较大的工况,往往会由于网格扭曲程度过大而影响计算的收敛性;郭春雨等[6]则以KCS船模为对象,提出了基于整体动网格技术的船舶阻力预报方法,应用此方法虽较好地解决了网格更新的问题,但求解船舶大幅纵倾升沉运动时,水线面加密域较大,增加了网格数量,降低了计算效率.
近年来,重叠网格技术在求解船舶运动方面展现出广阔的应用前景[7-9],基于该技术,Wan D等[10-12]实现了KCS与DTMB 5512等多艘标模的自航及复杂操纵运动,极大地推动了船舶计算流体力学的应用与发展,但目前国内应用重叠网格开展船舶运动计算的相关研究仍较为滞后,且融合其他模型对船舶运动进行具体分析时,尚需更多的算例进行对比验证.本文基于Star CCM+软件平台,应用重叠网格技术,开展了不同航速下DTMB 5415船模航行姿态及阻力性能的数值预报,为船舶快速性评定提供了可行方法.
1 数值方法
1.1控制方程及湍流模型
文中以RANS方程作为求解船舶航行姿态及阻力的基本方程,其具体形式如下.
(1)
式中:ρ为流体密度;μ为流体粘度;p为静压;fi为单位质量的质量力;ui、uf为速度分量.
湍流模式选取SSTk-ω模型,详细推导过程参见文献[13],下面仅给出该模型的数学表达式.
(2)
(3)
式中:Γk和Γω为k和ω的有效扩散率;Gk为平均速度梯度产生的湍流动能;Gω为耗散ω产生的湍流动能;Yk和Yω为湍流k和ω的耗散;Sk和Sω为用户自定义源项.
1.2重叠网格技术
应用重叠网格模拟物体复杂空间运动时,将计算域分为多个子域,并分别对子域进行网格离散,通过域间空间插值可实现流场信息的交互,较动态变形网格技术,其简化了网格拓扑结构,增强了网格普适性,见图1.
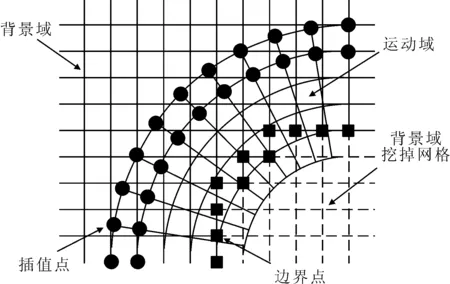
图1 重叠网格
在进行船舶运动求解时,设定背景域相对大地坐标系固定不动,同时在船体周围建立运动域,运动域随船运动,通过挖洞计算实时确定域间边界,背景域中被挖掉的网格不参与计算,边界点外两域重叠部分进行数据插值完成流场信息的传递.
2 船体姿态响应模型
为求解船体姿态的时历变化过程,见图2,定义大地坐标系E-ξηζ及随船坐标系O-xyz.其中,随船坐标系原点位于船体质心处,未释放船体运动时,随船坐标系与大地坐标系完全重合,船体处于正浮状态.
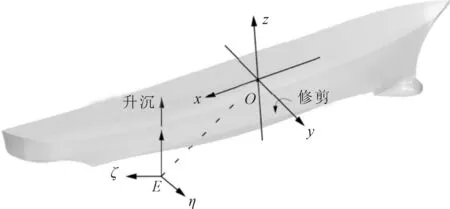
图2 坐标系定义
固定来流航速下,船体周围水动力发生变化,所受浮力及作用于重心的纵向力矩均偏离正浮平衡状态,释放纵向及垂向自由度后,船体开始运动,由于流体阻尼的作用,运动幅度逐渐衰减,并趋于新的稳定平衡状态.船体的纵向及垂向运动方程可表达为
(4)
(5)
式中:F与M与分别为船体所受浮力及相对质心的纵向力矩;w为垂向速度;q为纵摇角速度,B=mw为船体垂向动量;K=Iyq为船体所受纵向动量矩.
在计算过程中,通过对船体表面压力进行积分,求得不同时刻作用于船体上的力及力矩,结合上述运动模型,即可求解船体运动的时历变化过程,待计算稳定后便可获取船体阻力及流场信息,具体计算流程见图3.
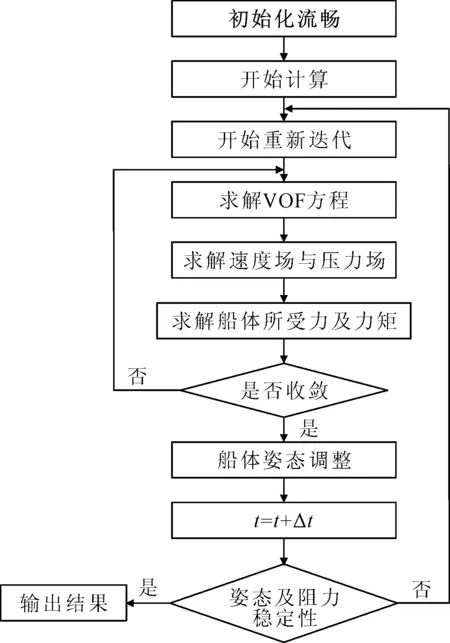
图3 计算流程图
3 数值模拟及结果分析
3.1计算对象
DTMB 5415为ITTC(International Towing Conference)推荐的舰船试验模型,国内外学者针对该模型开展了大量的阻力及流场测量试验[14],为CFD计算方法的可靠性验证提供了强有力的支撑,船模主参数见表1.
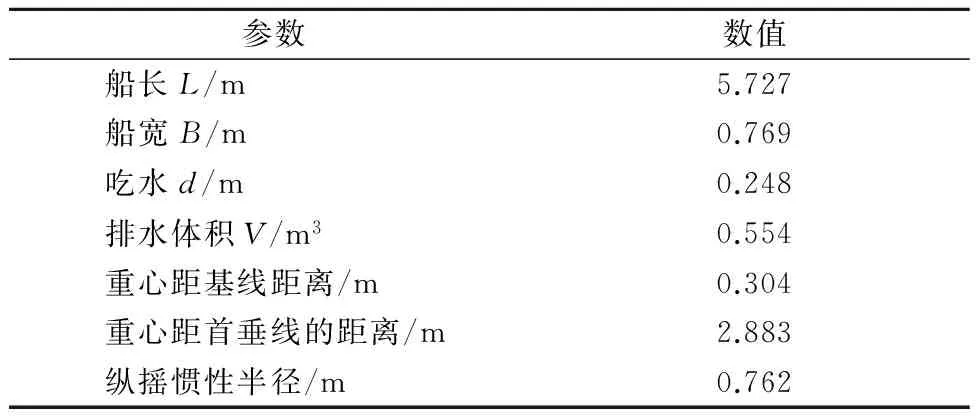
表1 DTMB 5415模型主参数
3.2计算域设置
由于模型关于船体中纵剖面对称,为减小计算量取一半船模开展计算,见图4,运动域设置为长宽高为1.0L×1.0B×0.3L的方形域,背景域大小及边界条件设置如下:
1) 入口入口距离船体首垂线1.5倍船长,边界条件均设置为速度入口.
2) 出口出口距离船体尾垂线3倍船长,边界条件设置为压力出口,压力为未扰动时边界压力.
3) 流域的上、下及右边界设置无滑移、不可穿透壁面.
4) 流域左边界设置为对称面.
5) 船体表面定义为无滑移、不可穿透边界条件,边界条件设置为无滑移壁面.
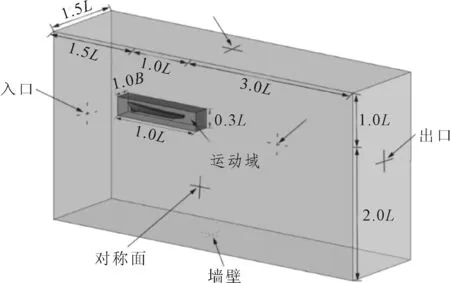
图4 计算域大小及边界条件定义
3.3网格划分
文中采用切割体网格技术分别对背景域及运动域进行网格离散,为确保两域之间数据传递的稳定性,对域间重叠部分网格尺度进行了均一化处理,同时为准确地捕捉两相流的自由液面,对船体吃水附近区域进行网格加密,此外,在船体近壁面设定了局部加密区,确保壁面y+在30~300之间,并对船体首尾处的网格进行了细化处理,船体表面及域剖面网格见图5,总网格数为263万.
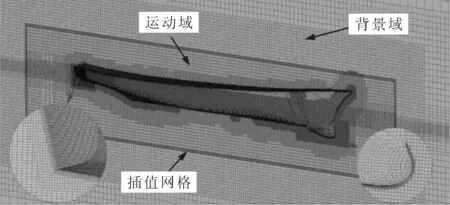
图5 船体表面及域剖面网格
3.4结果与分析

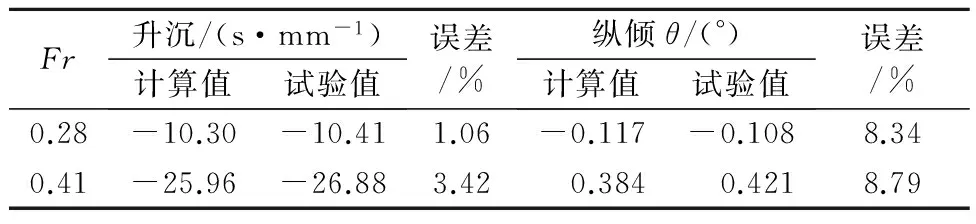
表2 姿态计算结果分析
本文分别将释放姿态前后船模阻力的计算结果稳定值与试验值进行了对比(见表3),由误差分析了可知,释放姿态前船模阻力计算误差均大于计及航行姿态的工况,计及姿态下,船模阻力计算误差均小于3%.
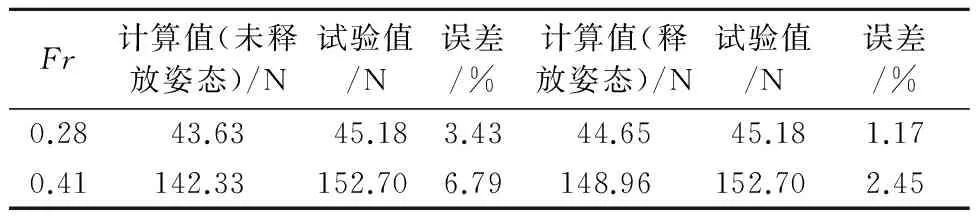
表3 阻力计算结果分析
图6给出了不同傅氏数下船模兴波波形图,对比试验值可得,应用文中方法可较为准确地预报船模兴波的演变规律.船体表面兴波波高沿船长方向的变化见图7,分析可知,Fr=0.28时,计算所得船体表面兴波与试验值较为吻合,而当Fr=0.41时,在后船体表面兴波较试验值略低,但仍能反映波高沿船长方向的发展规律.
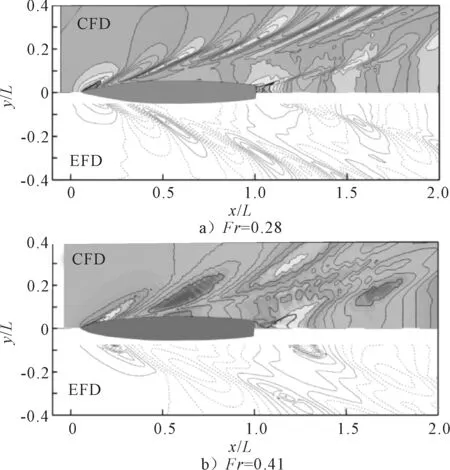
图6 不同航速下船体兴波图
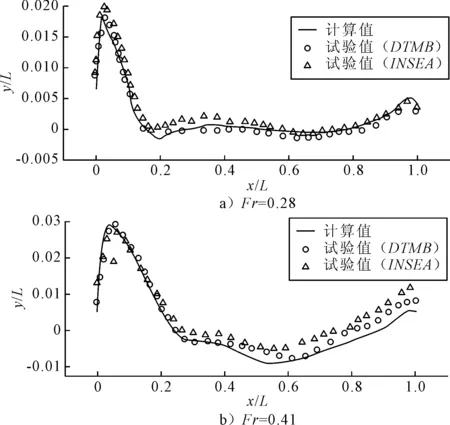
图7 不同航速下船体表面波高图
4 结 束 语
基于Star-CCM+内嵌的VOF模型及多自由度求解器,应用重叠网格技术开展了DTMB 5415船模不同航速下航行姿态及阻力的数值预报.分析计算结果可知,文中方法能够较为准确地预报中高速下船模的航行状态及流场信息,可为船舶快速性预报提供可行途径.
[1]YASUKAWA H.A rankine panel method to calculate steady wave-making resistance of a ship taking the effect of sinkage and trim into account[J].Transactions of the West-Japan Society of Naval Architects,1993(86):27-35.
[2]王中,卢晓平,王玮.考虑升沉和纵倾的方尾船非线性兴波阻力计算[J].水动力学研究与进展,2010,25(3):422-428.
[3]王中,卢晓平,付攀.三体船升沉和纵倾计算及其对兴波阻力的影响[J].上海交通大学学报,2010,44(10):1388-1392.
[4]倪崇本,朱仁传,缪国平,等.计及航行姿态变化的高
速多体船阻力预报[J].水动力学研究与进展,2011,26(1):101-107.
[5]YAO C B,DONG W Ci.Method to calculate resistance of high-speed displacement ship taking the effect of dynamic sinkage and trim and fluid viscosity into account[J].Journal of Shanghai Jiaotong University,2012,17(4):421-426.
[6]郭春雨,王恋舟,赵庆新,等.一种计及姿态变化的船舶阻力预报方法[J].船舶工程,2015,37(1):31-34.
[7]CARRICA P M,ISMAIL F,HYMAN M,et al.Turn and zigzag maneuvers of a surface combatant using a URANS approach with dynamic overset grids[J].Journal of Marine Science and Technology,2013(18):166-181.
[8]CARRICA P M,FU H,STERN F.Computations of self-propulsion free to trim and of motions in waves of the KRISO Container Ship (KCS) model[J].Applied Ocean Research,2011(33):309-320.
[9] CARRICA P M,CASTRO A M,STERN F.Self-propulsion computations using a speed controller and a discretized propeller with dynamic overset grids[J].Journal of Marine Science and Technology,2010(15):316-330.
[10]WAN D,SHEN Z,CARRICA P M.Dynamic overset grids in OpenFOAM with application to KCS self-propulsion and maneuvering[J].Ocean Engineering,2015(108):287-306.
[11] CARRIC P M,WILSON R V,NOACK R W,et al.Ship motions using single-phase level set with dynamic overset grids[J].Computers & Fluids,2007(36):1415-1433.
[12]TEZDOGAN T,DEMIREL Y K,KELLETT P,et al.Full-scale unsteady RANS CFD simulations of ship behaviour and performance in head seas due to slow steaming[J].Ocean Engineering,2015(97):180-206.
[13]LARSSON L,RAVEN H.Ship resistance and flow[M].New York:Society of Naval Architects and Marine Engineering,2010.
[14]OLIVIERI A,PISTANI F,AVANZINI A,et al.Towing tank experiments of resistance,sinkage and trim,boundary layer,wake,and free surface flow around a naval combatant INSEAN 2340 model[R].Iowa,USA:University of Iowa,2001.
Study on the Numerical Prediction Method of Calculating the Sailing State and Resistance for Medium & High Speed Ship
ZHOU GuangliOU Yongpeng
(DepartmentofNavalArchitecture,NavalUniversityofEngineering,Wuhan430033,China)
The sailing state can be remarkably different when a displacement ship advancing with various high speeds in calm water. A method is presented to calculate the sailing state and resistance for medium & high speed ship based on Reynolds Averaged Navier-Stokes (RANS) equations and overset mesh. The surface combatant DTMB 5415 is chosen as an example to verify the method’s feasibility by simulating the ship’s hydrodynamic performance withFr=0.28 and 0.41. The results show that the errors of the calculated sinkages and trims can be controlled within 4% to 10% and the errors of the calculated resistances are less than 3%. Meanwhile, the current method can more accurately capture the ship wave profiles, which provides a feasible tool for the prediction of sailing states and resistances of medium & high speed ship.
medium & high speed ship; overset mesh; CFD; sailing state; resistance
2015-12-28
U662.3
10.3963/j.issn.2095-3844.2016.04.014
周广礼(1990- ):男,博士生,主要研究领域为船舶水动力学
*广东省教育部产学研结合项目(2012B091000137)、总装水动力重点基金资助项目(9140A14030712JB11044)资助
猜你喜欢
微型电脑应用(2022年12期)2023-01-30
舰船科学技术(2022年20期)2022-11-28
舰船科学技术(2022年11期)2022-07-15
造船技术(2022年1期)2022-03-08
船舶标准化工程师(2019年4期)2019-07-24
舰船科学技术(2016年1期)2016-02-27
船舶标准化工程师(2015年5期)2015-12-03
中国舰船研究(2014年6期)2014-05-14
中国电子科学研究院学报(2013年1期)2013-06-10
中国舰船研究(2012年1期)2012-11-09
