永磁同步直线电机模糊PID控制的研究
2016-08-29 02:14山东大学控制科学与工程学院马晓静李金旭
电子世界 2016年15期
山东大学控制科学与工程学院 马晓静 李金旭
永磁同步直线电机模糊PID控制的研究
山东大学控制科学与工程学院马晓静李金旭
与传统的永磁同步电机相比,永磁同步直线电机具有体积小、效率高、输出扭力大等优势,因此在城市交通、加工中心及半导体等行业得到了广泛的应用。本文以永磁同步直线电机为主要研究对象,分别采用模糊PD控制、模糊PID控制方法设计直线电机控制的速度控制器,并与传统PID速度控制器进行对比。同时,针对直线电机中固有的一些扰动因素,如摩擦力扰动、电机推力波动等,对两种控制器进行优化设计,削减、抑制扰动因素的不良影响,实现对系统给定速度信号的快速、精确响应,使系统满足设计指标。
永磁同步直线电机(PMSLM);速度控制器;矢量控制;模糊PID控制
直线驱动技术是以直线电机为主要研究对象,以电磁感应原理为理论基础,集电磁学、电力电子技术、自动控制原理、现代控制理论、信号分析与处理、机械工程、动力工程等学科为一体的新技术。在民用和军用领域,都体现了巨大的实用价值。本文以实际应用为背景,根据相应的设计指标,针对直线电机控制系统中的实际问题,对控制策略进行研究,设计出可以满足系统性能指标的控制器。
1 矢量控制
1972年德国工程师F.Blaschke提出了旋转电机矢量控制原理,即根据磁场定向控制方法,通过检测与控制交流电机定子电流矢量,分别控制交流电机的励磁电流和转矩电流,从而实现对交流电机转矩的控制。该原理是针对旋转电机提出的,但由于矢量控制技术得到了日益发展和不断完善,该原理也适用于直线电机,并且获得了广泛应用。
具体就是控制电机的电枢磁通势和励磁磁场定向空间角度,称为“角度控制”。在实际情况中,当电枢磁通势与励磁磁场的夹角为90度,即称为“磁场定向控制”。此时电枢磁通势与励磁磁场正交,电机具有较好的去耦特性,单位电流产生最大电磁推力。
2 直线电机数学模型的建立
永磁同步直线电机和永磁同步旋转电机的数学模型类似,首先假设:1)铁心饱和忽略;2)涡流和磁滞损耗不计;3)阻尼绕组忽略;4)反电动势为正弦曲线。

只考虑电机的基波分量,则直线电机磁链方程为:

其中,λd、λq、λPM分别为d、q轴和等效永磁体的磁链;分别为d、q轴和等效永磁体的电感和电流;当电动机的永磁体是如图直线安装时,则为常数。
d-q轴模型电压方程为:其中,ud、uq分别为d、q轴动子电压,分别为d、q轴动子磁链,Rs为动子电阻,v为线速度,为极距,微分算子。

电磁推力表达式为:


其中,Kf为电磁推力系数。
机械运动方程为:

其中,v为动子速度,B为摩擦系数,M为动子及其所带负载的总质量,Ff为总阻力,FL为负载阻力,Ff为端部效应力,Fsf为动子与导轨的滑动摩擦力,s为动子线位移。对(2.20)、(2.22)进行拉氏变换得:

由以上两式,可得永磁同步直线电机的系统方框图,如图2.1所示。电流环控制结构带有一个电流负反馈的功放驱动级,如图2.2为带有电流反馈功放级的电机系统方框图。其中为给定电流控制信号,一般电流环中的ACR(Automatic current regulator)为常数。其功放驱动级相当于电流源,电枢电流由控制,另外,电流环的比电机速度环的响应速度快很多,因此,反电势回路的影响可忽略不计。
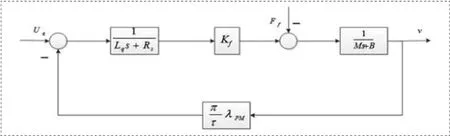
图2 .1 永磁同步直线电机系统方框图
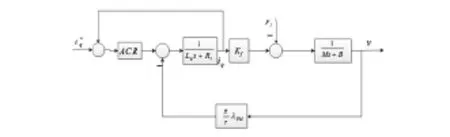
图2 .2 带电流负反馈的直线电机模型方框图

图2 .3 简化后的永磁同步直线电机模型方框图

图2 .4 简化后的系统方框图
为提高系统抗外部扰动Ff的能力,并维持快速的响应速度,将整个系统设计为一个速度环、电流环双闭环的串级控制系统。
根据以上分析,串级控制系统的模型方框图如图2.4所示。该系统使用传统PID控制以及模糊控制对控制器进行优化,使系统满足既定的性能指标。
3 系统速度控制器的设计
传统PI控制设计:
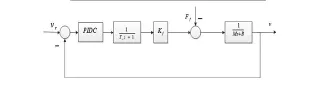
图4 .1 PID速度反馈控制系统方框图
如图4.1所示,系统开环传递函数为:

根据系统要求,首先对速度控制器进行选择。针对恒定干扰信号,积分环节可使干扰的稳态误差为零,即在阶跃干扰信号Ff信号下,系统响应无静差。综上所述,速度控制器选取为PI控制器。所以Gc(s)传递函数为:

所以系统开环传递函数为:

当无干扰时,误差传递函数为:

有Ff扰动时,由Ff扰动带来的误差传递函数为:

所以,由终值定理可知,当系统输入为阶跃速度信号时,扰动Ff带来的误差为零。
按控制器串联工程设计方法,即在串联校正基础上,将期望特性进一步简单化,使系统开环对数幅频特性成为中频区斜率为(-40dB)—(-20dB)—(-40dB)的形状,因此系统开环期望传递函数如式(4-1)所示,并以取得的最佳性能来确定参数。这就是工程设计法的主导思想。

本文使用三阶最佳设计法进行整定。三阶最佳设计法公式如下:

wc为中频段的剪切频率。按照模最佳(即闭环系统幅频特性的模恒等于1准则),可以推导出所谓“三阶工程最佳”或“对称最佳”参数,由此可得期望的控制器参数:

则系统开环传递函数为:
4 系统仿真
仿真结果如下图所示,将传统PI控制、模糊控制以及模糊PID控制整合在一起,更直观地分析这三种控制策略对系统性能的影响。
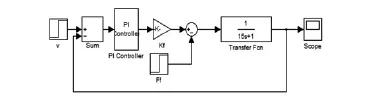
图4 .1 系统的PI控制Simulink仿真图

图4 .2 模糊PD控制器Simulink仿真
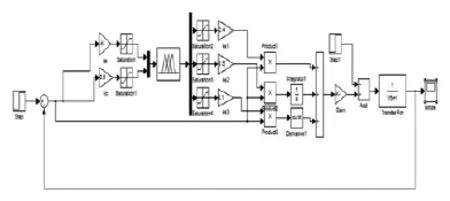
图4 .3 模糊PID控制器Simulink仿真
对上述三种控制进行对比分析,列一个如下4.1表格。

表4 .1 传统PID、模糊、模糊PID控制器性能对比

图4 .4 仿真结果对比分析
5 结束语
本文以永磁同步直线电机为研究对象,分别采用传统PID控制、模糊PD控制以及模糊PID控制方法设计永磁同步直线电机的速度控制器,并进行实验对比分析。得出结论:模糊PID控制结合了传统PID抗干扰性强和模糊控制器响应速度响应快的优势,在提高系统动态性能的同时,使系统变为无差,从而,提高了系统的稳态性能,模糊PID控制具有很强的实用性。
[1]张春良,陈子辰,梅德庆.直线电机驱动技术的研究现状与发展[J].农业机械学报,2002,33(5):119-123.
[2]郭庆鼎,孙宜标,王丽梅.现代永磁电动机交流伺服系统[M].中国电力出版社,2006.
[3]仇翔,俞立,南余荣.永磁同步直线电机控制策略综述[J].微特电机,2005,33(10):39-43.
[4]李晓丹.模糊PID控制器的设计研究[D].天津大学,2005.
[5]魏源.直线感应电机直接推力模糊控制研究[D].中南大学,2013.
[6]张春良,陈子辰,梅德庆.直线电机驱动技术的研究现状与发展[J].农业机械学报,2002,33(5):119-123.
马晓静(1992—),硕士研究生,现就读于山东大学控制科学与工程学院,主要研究方向为工业自动化。
猜你喜欢
数学物理学报(2022年4期)2022-08-22
数学物理学报(2021年4期)2021-08-30
北京航空航天大学学报(2021年7期)2021-08-13
上海大中型电机(2021年2期)2021-07-21
防爆电机(2020年6期)2020-12-14
数学物理学报(2019年4期)2019-10-10
小学生导刊(2018年13期)2018-11-30
数学小灵通·3-4年级(2017年10期)2017-11-08
小学生导刊(低年级)(2017年2期)2017-06-10
组合机床与自动化加工技术(2014年12期)2014-03-01