
二轴稳定平台稳定精度分析
2016-09-07 07:52马文韬
新技术新工艺 2016年5期
马文韬
(中国电子科技集团公司第二十八研究所,江苏 南京 210014)
二轴稳定平台稳定精度分析
马文韬
(中国电子科技集团公司第二十八研究所,江苏 南京 210014)
稳定平台是一种安装在载体上,能够隔离载体安装面的位置变化,提供一个水平安装面的设备。主要对某二轴稳定平台的稳定精度进行了分析,得到了稳定精度与干扰力矩大小有关的结论,干扰力矩增大,稳定精度下降。
稳定平台;稳定精度;干扰力矩
由于部队机动作战的需要,越来越多的光电侦察设备集成在车载升降桅杆的顶部,当桅杆举升工作时,环境中各种因素的影响将导致红外侦察设备的视线造成扰动,此时获取的外部环境信息具有不连续性,应经过复杂的姿态矩阵变换后才能对其进行处理与识别。为了消除上述影响,通常在升降桅杆与传感器之间安装可有效隔离载体运动的稳定平台,来实现视线稳定,使传感器视线在大地坐标系中保持稳定,从而实现车载传感器系统对目标的可靠、高精度跟踪与测量。本文主要分析并研究某车载红外设备两轴稳定平台稳定精度。
1 稳定平台工作原理
稳定平台的工作原理是通过姿态测量得出当前实时姿态信息,通过驱动伺服电动机的转动,调节上平台面达到稳定姿态。
当光学系统随车体发生抖动时,要测量出抖动量,然后对该抖动量进行补偿。本文选用两轴稳定平台来实现视轴的稳定。两轴稳定平台以隔离原理为理论基础,选用现代控制元件为执行元件,最终实现视轴在惯性空间的稳定。
两轴稳定平台由方位环和俯仰环构成,以实现在方位与俯仰方向的稳定。方位环和俯仰环稳定回路均采用陀螺仪作为惯性敏感元件,敏感载体运动在方位上产生角误差,该角误差信号以相应极性和线性比例的电压信号形式输出,经过预处理的电压信号通过控制器在直流力矩电动机轴上产生反作用稳定力矩,从而实现对视轴扰动的抑制,保持视轴在惯性空间的相对稳定[1]。
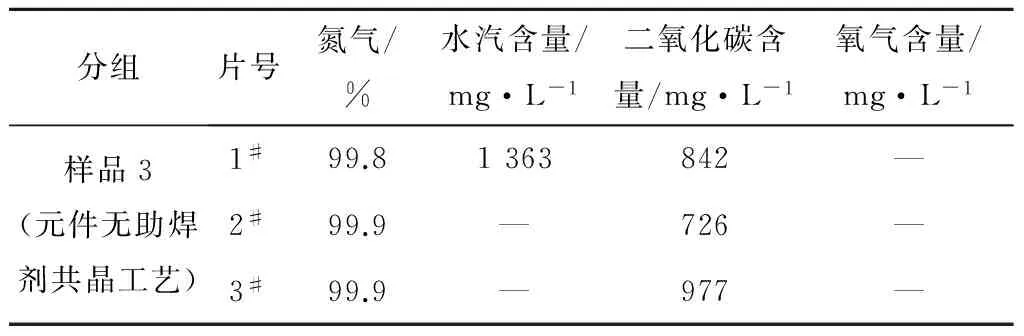
表5 无助焊剂共晶工艺内部水汽含量表
4 结语
在具体工艺过程中,还可以通过对比上述研究积累的X射线照片,根据X射线照相的空洞分布特征,快速判断产生空洞的原因,为工艺参数调整提供捷径。
[1] Licari J J, Enlow L R.混合微电子电路技术手册[M]. 朱瑞廉,译.北京:电子工业出版社,2004.
责任编辑郑练
2 稳定平台组成及技术指标
红外稳定平台能够实现红外设备在水平和俯仰方向上的稳定、搜索和跟踪功能,它由水平回转座、俯仰框架、惯性传感器、角度传感器、力矩电动机以及控制电路板组成[2]。结构外形如图1所示。
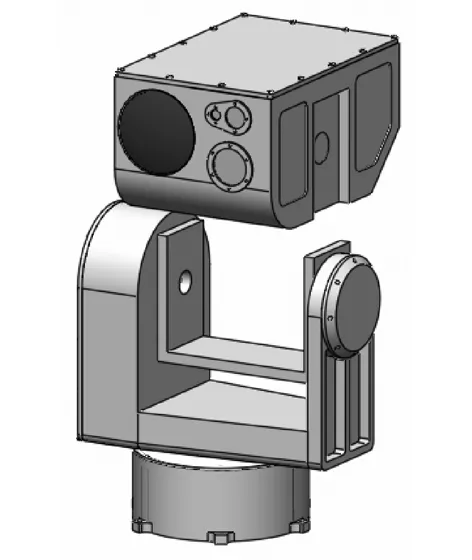
图1 稳定平台结构图
红外稳定平台采集惯性传感输出的方位角速率和俯仰角速率信号,以驱动方位电动机和俯仰电动机,实现平台稳定,其功能框图如图2所示。
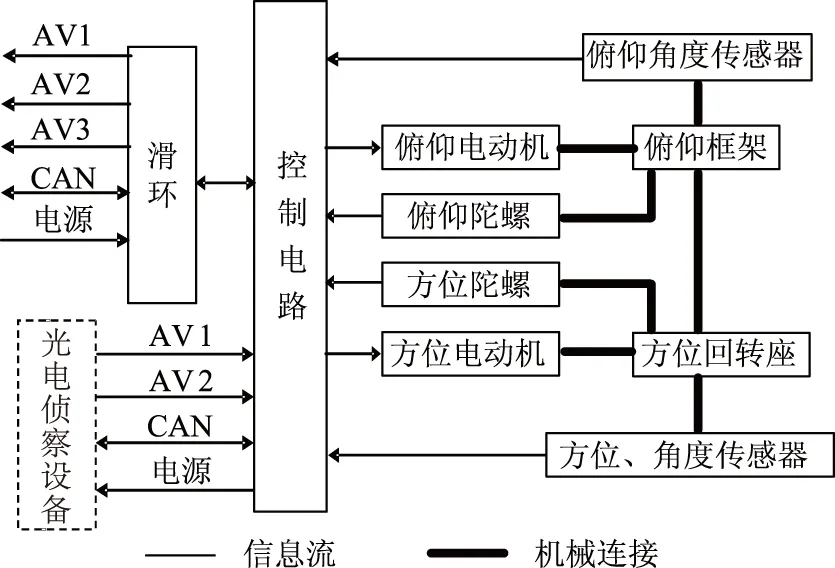
图2 稳定平台功能框图
红外稳定平台需要达到的稳定精度:瞄准线双向稳定≤0.1 mrad(1σ)。
3 稳定精度计算
3.1稳定平台控制模型
平台稳定系统控制框图如图3所示。由速率陀螺构成的速度闭环形成了稳定系统主回路,一旦系统受到外扰动,稳定平台通过速率陀螺获得平台相对惯性空间的角速度,经信号调理后驱动力矩电动机输出力矩,以抵抗干扰力矩,直至平台相对惯性空间的角速度为零。可见基于速度反馈的稳定平台能够迅速把扰动消除在速度闭环内,保证跟踪过程中光轴的始终稳定[3]。
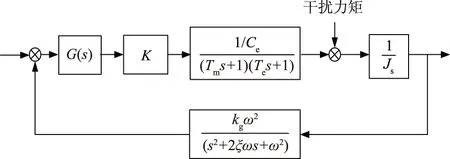
图3 稳定回路(速度环)原理框图

上述参数中,Tm、Te和Ce为力矩电动机传递函数参数,根据本系统选用的力矩电动机参数、速率陀螺参数,以及负载折算到电动机轴上的转动惯量,可以获得电动机、速率陀螺和稳定平台台体的传递函数G1(s)、G2(s)和G3(s)[4]。
3.2速度环校正
调整稳定控制系统开环增益。由于速度环为Ⅰ型系统,在阶跃输入作用下可完全消除静态误差,但是要求增益充分大。系统设计的稳定精度为0.1 mrad,即要满足静态误差<0.006°,为保证裕量,应针对速度环开环传递函数波特图调整开环增益,使其满足静态误差要求。
考虑到速度环开环传递函数波特图中的相角裕度太小,导致系统稳定性较差,因此,应采用超前校正提高截止频率,以使相角裕度>45°。此外为消除噪声影响,要求高频区的斜率应≥-40 dB/dec,因此,还必须对高频进行校正。经过反复计算,调整并确定校正函数。在仿真计算中最终获得的速度环开环传递函数波特图如图4所示。
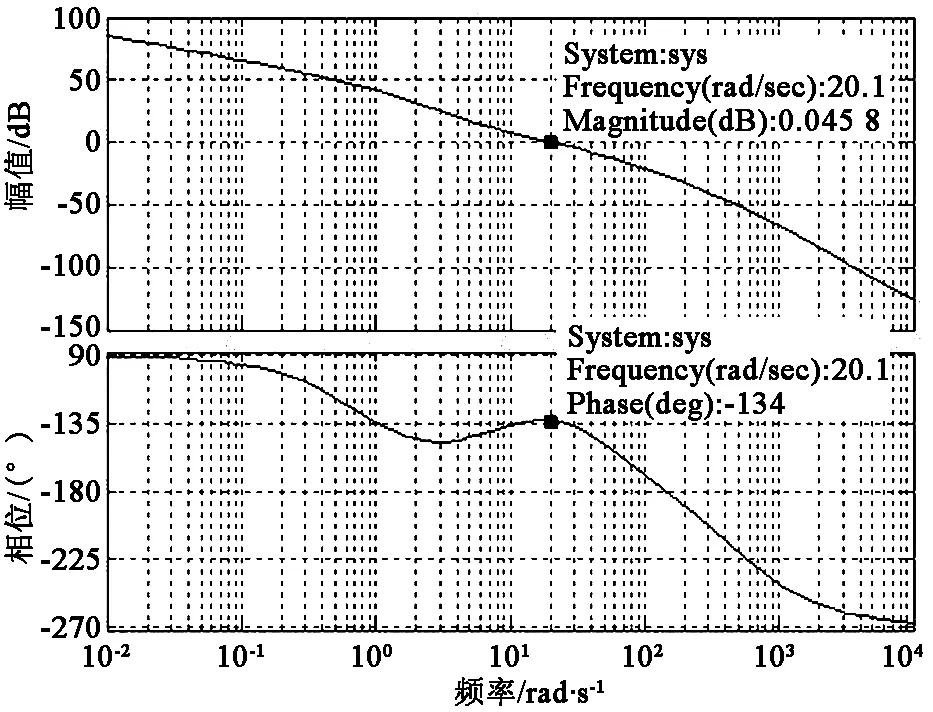
图4 最终校正速度环的波特图
图4中校正后开环系统的截止频率约为20 rad/s,相位裕度为46°,幅值裕度为32.4,可以看出,此时系统动态特性得到了很大改善,响应速度较快,且低频段增益充分大,高频段增益减小,满足速度控制系统要求。
3.3稳定平台精度计算
影响稳定精度的主要因素是框架不平衡力矩、摩擦力矩、载体扰动力矩以及风阻力矩。为了说明本系统在干扰作用下的稳定精度,在计算机上利用MATLAB软件对设计的稳定平台控制系统模型进行模拟干扰力矩仿真[5-6]。假设闭环系统的输入为0,在平台轴系上直接施加各种模拟干扰力矩。对各种干扰力矩进行模拟仿真后获得的稳定精度曲线如图5~图8所示。
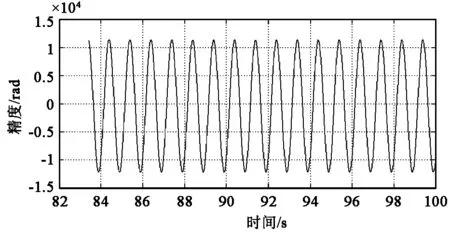
图5 输入大小为500 gf·cm正弦波干扰力矩时 的稳定精度曲线
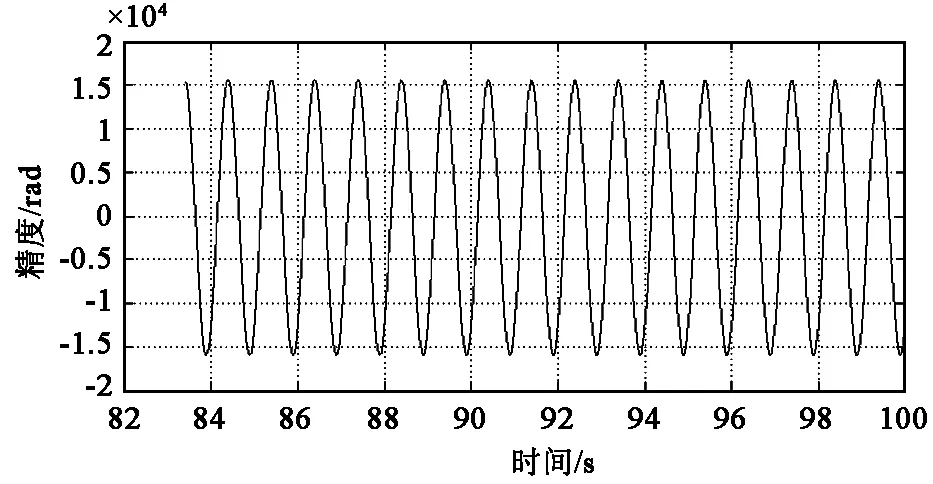
图6 输入大小为800 gf·cm正弦波干扰力矩时的 稳定精度曲线
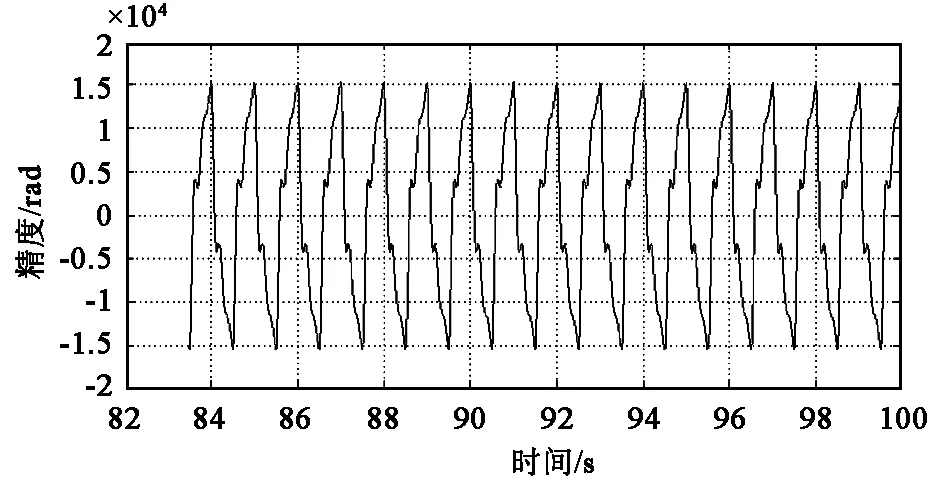
图7 输入大小为500 gf·cm方波干扰力矩时的 稳定精度曲线
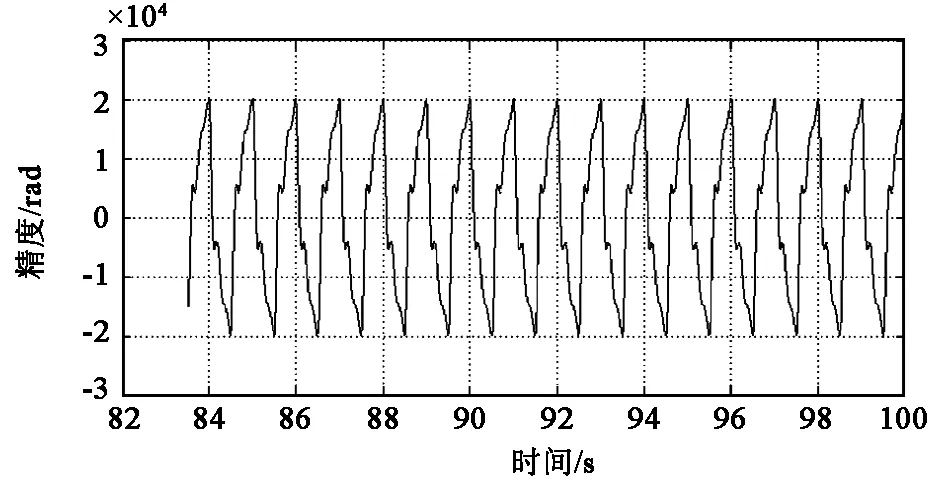
图8 输入大小为800 gf·cm方波干扰力矩时的 稳定精度曲线
4 结语
综合上述分析可知,稳定精度与干扰力矩大小有关,干扰力矩变大,稳定精度下降。而平台的主要干扰力矩为摩擦力矩、导线干扰力矩和质量不平衡力矩,最大干扰力矩预计可达800 gf·cm。从上述稳定精度模拟仿真中可看出,在800 gf·cm的外加干扰力矩条件下,该稳定平台稳定精度的峰值约为±0.2 mrad,折合为0.07 mrad(1σ),满足0.1 mrad(1σ)的指标要求,且留有裕量,因此,稳定平台的稳定精度能够达到0.1 mrad的指标要求。
参考文献
[1] 胡寿松.自动控制原理[M]. 北京:科学出版社,2005.
[2] 张鹏.舰载摄像稳定平台的结构设计[J].舰船电子对抗,2006,6(3):70-73.
[3] 张智永.移动载体稳定跟踪平台测控技术研究汇[D]. 长沙:国防科学技术大学,2001.
[4] 郭新胜.车载稳定平台伺服控制系统[D]. 南京:南京理工大学,2004.
[5] 王苏.舰载激光武器高精度稳定平台系统研究[D]. 哈尔滨:哈尔滨工程大学,2009.
[6] 张施贤.机载相机稳定平台伺服系统的研究[D]. 南京:南京理工大学,2008.
作者简介:马文韬(1981-),男,工程师,主要从事指控装备机构工艺设计等方面的研究。
收稿日期:2015-12-25
责任编辑郑练
Stabilized Precision Analysis of Two Axes Stablized Platform
MA Wentao
(The 28th Research Institute of CETC, Nanjing 210014, China)
The stablized platform which is fixed on the carrier can isolute the change of the carrier’s installation surface and supply the retentive plane. Mainly analyze the stabilized precision of a two-axes stablized platform. The stable accuracy is associated with the disturbance torque size, and when the disturbance torque increases, the stable accuracy decreases.
stablized platform, stabilized precision, disturbance torque
TN1 24
A
李波(1974-),男,高级工程师,大学本科,主要从事混合电路组装、封装工艺等方面的研究。
2015-12-18
猜你喜欢
农业工程学报(2022年13期)2022-10-09
电气电子教学学报(2022年3期)2022-07-30
灌溉排水学报(2022年6期)2022-07-13
燃料化学学报(2022年5期)2022-05-30
中学生数理化·八年级物理人教版(2022年3期)2022-03-16
水泥工程(2020年4期)2020-12-18
中学生数理化·八年级物理人教版(2017年3期)2017-11-09
海军航空大学学报(2015年1期)2015-11-11
中学生数理化·八年级物理人教版(2014年1期)2015-01-09
中学生数理化·八年级物理人教版(2014年2期)2014-04-02
