基于定向天线信号强差的定位方法
2016-09-08 10:31李新春
计算机应用与软件 2016年8期
李新春 兰 根
(辽宁工程技术大学电子与信息工程学院 辽宁 葫芦岛 125105)
基于定向天线信号强差的定位方法
李新春兰根
(辽宁工程技术大学电子与信息工程学院辽宁 葫芦岛 125105)
针对基于定向天线定位方法的定位实时性和定位精度问题,提出一种基于定向天线信号强差(LRD)的室内无线定位方法。利用带有两个相互垂直定向天线的节点作为参考节点,定向天线在所覆盖区域距离不变时角度变量与信号强度近似满足抛物函数关系。而目标节点所获得的两参考定向信号强度差值,距离不变时角度变量与信号强差近似满足线性关系。目标节点通过两种函数关系实现自身定位,并且提出最大密度(LD)的方法对定位结果进行改进。实验结果表明,该方法不仅能快速对目标进行定位而且具有较高的定位精度。
定向天线信号强度差定位最大密度
0 引 言
节点定位是无线传感器网络(WSN)的关键核心支撑技术之一[1]。未知节点通过与少量已知位置信息的参考节点进行通信从而估算自身的位置。近年来,WSN定位方法研究也取得了大量研究成果。
目前,无线传感网络的定位技术主要有测距和非测距两类定位[2]。基于非测距的定位算法包括质心算法、DV-Hop算法、指纹算法等[3],这些算法无需额外硬件支持。基于测距的定位算法主要有到达时间(TOA)、接收信号强度(RSSI)和到达角度(AOA)等。在现今大部分无线传感网络定位方法研究中所使用的传感器节点和参考节点均采用普通全向天线[4-8],但基于定向天线的定位研究不多[9-13]。定向天线能有效避免多径效应的干扰,有助于提高定位精度。如董振中等[9]提出了一种基于定向天线无需测距的分布式定位算法,未知节点利用定向天线确定邻居节点之间的相对位置,在算法仿真中取得了较好的定位精度;Chia[10]研究了利用4个配备定向天线的参考节点,实现了无需测距的定位方法,降低了特定范围内传感器的硬件要求,并减少了参考节点传输范围内和感测环境中存在的障碍变化影响,但定位耗时长。值得一提的是,RAL[14]和EDOA[15]这两种定位方法以及文献[16]中的定位方法,都是利用定向天线的信号强度分布特性来确定信号到达的方向信息。根据天线的旋转来获得信号的最大强度值,出现最大值的同时也就估算出节点相对于参考节点所处的位置方向。三种方法原理简单,无需测距,定位效果也好。但RAL方法和文献[16]中的方法均需要时间旋转定向天线,而EDOA方法也需要耗时旋转反射抛物面,都只是针对静态的网络节点,不能对网络中的动态节点进行实时定位。
为解决以上基于定向天线定位系统的定位实时性问题,本文将指纹算法与定向天线相结合,提出一种基于定向天线信号强差的定位方法(LRD)。通过比较捕获安装在同一参考节点上的两相互垂直定向天线的信号强度,可以在极短的时间内确定自身相对于参考节点的方位。由已知的参考节点位置和所确定的方位信息就可以快速和准确地对待测节点进行定位估算。
1 信号强差算法描述
1.1算法原理
如图1所示,信号发出节点为参考节点,远端黑色节点为待测节点。本文参考节点由两个普通节点组成,每个节点装有一块相同型号的定向天线,且参考节点上的两块定向天线相互垂直(构成垂直天线和水平天线)。定义待测节点到参考节点之间的连线与参考节点的定向天线轴线夹角为方位角,如果待测节点与水平定向天线的方位角大小是α,那么与垂直定向天线的方位角就是90°-α。

图1 目标节点与参考节点两垂直天线的方向夹角
定向天线在水平方向图上表现为一定角度范围的电磁辐射(类似倒立不完整的圆锥),也就是所说的方向性。其主要参数为波束角,波束角是天线发射波束的张角[17],即以定向天线中轴线的延长线为轴线,由此向外至能量减少一半时的角度。显然,与天线中轴线夹角越小,接收信号强度越强;反之,与中轴线夹角越大,信号强度越弱。从理论上说,定向天线的电磁辐射范围内的信号强度大小变化规律是由天线的中轴线向两边远离中轴线的方向呈递减分布,而且由于定向线的结构对称性可知,在无明显障碍物的情况下,天线轴线两边的信号强度分布是接近对称的。
如图2所示,对单个、可旋转的定向天线信号强度分布规律进行测试(测试环境是室内篮球场)。定向天线轴线方向和坐标系横轴正方向一致,在距天线分别为1、5、10 m的位置摆放测量节点;定向天线从0°逆时针每旋转一度,测量点观测接收信号的强度值,直到旋转90°,得到0°到90°的测量值。同样地,从0°顺时针旋转90°得到-90°度到0°的观测值。考虑到实际的信号采集复杂程度,在满足定位需求的同时,我们也可以将测量的间隔设为2°,使工作量减半。
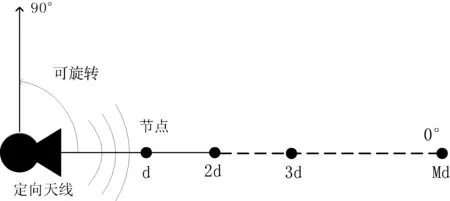
图2 信号采集图
信号强度值随方位角度的变化分布如图3所示,图中每个角度的信号强度数据都是10次测量值的平均值。由图3可见,定向天线的中轴线方向测得的信号强度达到最大;距离不变时信号强度的大小随着与中轴线夹角的增大而递减,呈曲线分布,分布曲线以定向天线中轴线为轴两边近似对称分布。通过回归分析,当待测节点与参考节点的距离一定时,接收的信号强度值与方位角可以近似二次抛物函数关系。

图3 距离不变时定向天线的信号强度分布
其次,如图1所示,系统中的参考节点配有两个相互垂直定向天线。由于参考节点结构的特殊性,待测节点所接收的水平天线与垂直天线的信强差值在0°~45°与45°~90°范围内近似以点(0,45°)为对称中心对称分布,如图4所示。通过线性分析,信强差值与方位角近似满足线性关系。

图4 距离不变时接收信号强度差值分布
根据定向天线所特有的信号强度分布规律,可以将距天线一定距离,方位角度范围在0°到90°内所接收的信号强度变化拟合成二次抛物函数。同时距离一定时可将待测节点所捕获的参考节点的两定向天线的信号强度差值与角度拟合成线性函数。根据信号强度的二次抛物函数和差值线性函数,就可以由待测节点接收两个参考节点(已知坐标)的信号强度数值来快速地对自身进行定位。
1.2定位过程
介绍完算法基本原理,下面讲述定位的过程,包括离线建库阶段和在线定位阶段。
1.2.1离线建库
本文将指纹定位与定向天线相结合,如同指纹定位算法一样,定位进行之前需要生成内容为函数的指纹库。在定位之前需要采集一定量的数据,分析所得数据生成对应的函数关系。所有的函数关系组成函数库,函数库生成后下载到每个待测节点,完成离线建库。为保证函数库的准确性,系统环境变换后需重新对函数库进行更新。
以下是具体的离线建库步骤:
(1) 采集信号强度值:如图2所示,参考节点上装有一个可旋转的定向天线,从x轴正方向逆时针向y轴旋转,每旋转一度同时向测量节点发送带有旋转方位角α的信号。接收节点放置在x轴正向距定向天线距离d,2d,…,Md处接收参考节点的信号,一个点采集多次数据,这里定义d=1m,M=10。接收到的信号强度值被平均后用Gkd(α)表示,其中k=1,2,…,M;α=0°,1°,…,90°。
(2) 进行二次回归:对于每个距离kd的Gkd(α),进行二次回归分析,将信号强度值随方位角α的变化近似地拟合成二次抛物函数Gkd(α)。
(3) 计算信号强度差值:对于每个距离kd,定义信号强度差:Dkd(α)=Gkd(α)-Gkd(90-α)。Dkd(α)值就是在方位角为α、距离为kd时,参考节点的水平天线和垂直天线在接收节点处的信强差。
(4) 进行线性回归:对于每个kd,通过线性回归分析,将信强差Dkd(α)随方位角α变化拟合成线性函数Lkd(α)。
(5) 存储函数:将所生成的二次抛物和线性拟合函数下载到待测节点,离线建库完成。
1.2.2在线定位
建库完成后,下一步进入在线定位阶段。本文定位原理如图5所示,参考节点信号覆盖的范围区域内随机分布着一定数量的待测节点,待测节点接收到参考节点信号后,利用离线阶段生成的函数库求取待测节点相对参考节点的方位角α和φ。根据已知参考节点B1与B2的坐标位置,就可以直接求出节点自身在网络中的坐标位置,实现定位。

图5 系统定位原理图
考虑到离线建库阶段是测量单点参考信号而生成的函数库,当进入在线定位阶段时是同时测量四个定向天线的信号。当多个定向信号同步发射时,测量值可能是多个天线信号的叠加,与真实信号强度偏离而不再适应离线阶段生成的函数模型,这样会增大定位误差。所以,在在线定位阶段尽量保证四个定向信号处于信号的非同步发射状态,避免信号强度的叠加,与单点信号采集分析模型相匹配。
以下是定位步骤:
(1) 接收参考节点信号:首先待测节点必须采集到参考节点B1所发出的水平信号强度R1v和垂直信号强度R1h,以及参考节点B2发出的R2h和R2v。
(2) 估算距离:对于每一个距离kd(k=1,2,…,M),都存在待测节点与参考节点B1的水平天线和垂直天线形成的两个方位角αkd和βkd。求Qkd(·)的反函数Qkd-1(·),则水平天线方位角αkd=Qkd-1(R1h),与垂直天线方位夹角βkd=Qkd-1(R1v)(αkd,βkd∈[0°,90°])。由图1可知,αkd与βkd满足关系: αkd+βkd=90°。所以可以将信号值R1h和R1v代入不同kd的函数关系式使得上一关系式最接近成立,来估算出待测节点与B1的距离,将所得距离设为kd1。与B1一样,待测节点与B2所对应的距离为kd2。
(3) 估算方位角:由上一步所求的距离kd1,推算出线性函数Lkd1(·),Lkd1(·)取反函数得到Lkd1-1(.),所以αkd1=Lkd1-1(R1h-R1v)。同样由所求的kd2可知φkd2=Lkd2-1(R2h-R2v)。
(4) 定位计算:求得待测节点与参考节点B1、B2水平定向天线的夹角分别为αkd1和φkd2后,已知B1(0,0),B2(D,0),就可以计算待测节点的位置坐标,定位坐标如下:
(1)
其中D是B1与B2之间的距离。在这说明一下,也可以用所求的kd1和kd2来求解节点的位置。但是计算比较发现,用方位角αkd1和φkd2的计算结果的精确度更高,这也就是为什么用的是角度计算而不是距离。
2 实验结果
2.1实验设备介绍
在硬件方面,本文定位选用的节点设备是Moteiv BAT mote节点,带有8 MHz Texas Instruments MSP430微处理器(10 k RAM,48 k Flash)和传输速率250 kbps,频率为2.4 GHz的ChipconCC2420无线收发器,内置全向天线,最大传输室内范围50 m,室外125 m。在软件方面采用一种开源的嵌入式操作系统——TinyOS作为平台并且用nesC编程语言来实现。
实验过程中用于信号强度的采集与分析的可旋转参考节点装有一块Maxim AP-12平板天线,并且可以在步进电机的作用下实现旋转。计算机可以同时控制电机和节点,这样由传感节点、步进电机、定向天线和计算机共同构建了信号采集实验的参考节点。定位实验中用于定位的参考节点装有两块相互垂直的Maxim AP-12平板天线,平板天线的水平与垂直的波束宽度分别为65°和28°。
考虑实验场地的便利性,选择了在10 m×10 m的室内的篮球场区域进行实验。如图6所示,两个参考节点分别放置在方形区域的底端直角位置,在定位区域部分网格交点处设置了25个测量点,定位点的编号是呈漩涡分布(考虑到定位误差大小的分布)。因为图中测量点离参考节点的距离最大为12.73 m,所以在信号强度采集的时候M值设置为13,即需要在距离参考节点1,2,…,13 m的位置对信号强度进行采集和分析。为了节省时间,考虑到4块定向天线的型号一样,对天线信号强度的采集和分析只进行了一次。

图6 实验区域平面图
2.2实验结果分析
在距离参考节点不同距离时,所生成的二次抛物拟合函数(Q)和线性拟合函数(L)的决定系数R2的大小变化如图7所示。从图中可以看出决定系数值一直在0.96以上,也就是说拟合的函数关系非常适合表示所测量的信号强度值和信强差值随方位角度的变化关系,这是本文定位方法得以实践的前提。

图7 二次抛物Q和线性L拟合函数在不同距离的决定系数R2分布
对实验区域的25个测量点进行定位,设置参考节点每秒钟向覆盖的区域发送十次信号,待测节点可以在每秒钟内对自身定位10次,取10次结果的均值作为最终的定位结果。定位计算的位置与实际位置的误差累计分布见图8所示。

图8 定位累积误差分布
图9是25个定位点的定位误差(欧氏距离)大小分布。根据图6定位点的分布规律,分布在定位区域靠近中间部分的定位点的误差值比靠近边缘的定位点的误差值更小。这一现象从图3可以得到解释,因为在靠近45°位置的函数线性程度比较好,与拟合的函数(L)更近似,而使得定位误差偏小。最后,由图9中的定位实验误差计算得到平均定位误差为121 cm。
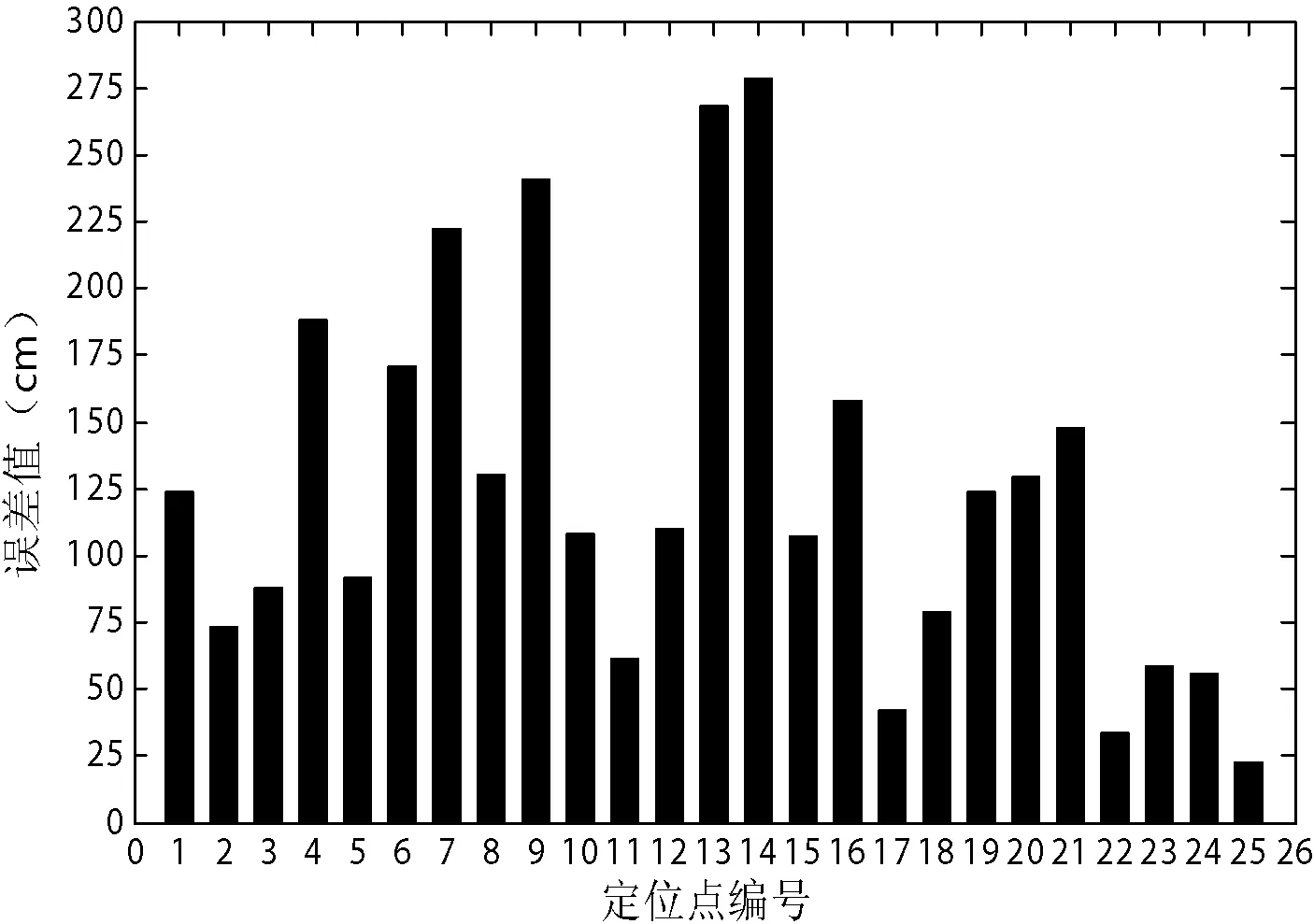
图9 25个定位点的定位误差大小分布
3 定位误差改进
考虑定位过程中会出现个别定位结果与整体定位结果偏差比较大,本文提出了一种最大密度(LD)的方法来降低定位误差。假设P是待测点估算的定位结果集合,如果从结果集合P中移除某些结果后存在子集P′⊆P,使P′达到最大密度,那么将P′替换P。密度ρ定义如下:
(2)
其中N是集合的基数,Dia是集合内所有定位结果围成区域的最大直径距离,可以通过求解两个位置之间的距离求得。以下就是集合最大密度确定的步骤:
(1) 如果|P|<3,就返回P;
(2) 通过计算出集合中某位置与其他位置之间距离的总和,将距离总和最大的元素移出集合得到集合P′,计算P′的密度ρ′;
(3) 如果ρ>ρ′,返回集合P;ρ<ρ′,令P=P′后接着进行(1)。
用LD方法对使用LRD方法所取得的定位结果进行处理。经计算后,加入LD之后平均定位误差从121 cm下降到了85 cm,定位性能提升了29%。定位误差的累计分布函数如图10所示,对比两条曲线可以看到定位性能有明显改善。

图10 改进后的定位累积误差分布
同时,表1还比较了两种本文所提及的无线定位方法及定位效果。从表中可以看出本文方法不仅有较高的定位精度,而且保证了定位的实时性,定位性能有明显的改善。

表1 几种定向定位方法的定位效果比较
4 结 语
本文在定向天线的定位领域内提出了一种基于信号强差的快速定位方法。在保证较高定位精度的同时克服了旋转定向天线定位系统的实时性问题,并且在10 m×10 m的室内环境中进行了实际的定位实验,定位实验结果计算所得到的平均定位误差为121 cm。除此之外,本文还提出了最大密度的方法对定位后的结果数据进行处理,使平均误差值降到85cm。下一步工作将利用本文定位方法进行更大面积范围的定位实验,还将更换不同型号的定向天线在比较中提高定位的精度。
[1] 崔逊学,左从菊.无线传感器网络简明教程[M].北京:清华大学出版社,2009:69.
[2] 孙佩刚,赵海,罗玎玎,等.智能空间中RSSI定位问题研究[J].电子学报, 2007,35(7):1240-1245.
[3] 杨清.基于指纹的无线室内精度定位方法研究[D].浙江:浙江大学,2011.
[4] Gu Y, Lo A, Niemegeers I.A survey of indoor positioning systems for wireless personal networks[J].Communications Surveys & Tutorials, IEEE, 2009, 11(1):13-32.
[5] Kivimäki T, Vuorela T, Peltola P, et al.A Review on Device-Free Passive Indoor Positioning Methods[J].International Journal of Smart Home, 2014, 8(1):71-94.
[6] Chuku N, Nasipuri A. Performance evaluation of an RSSI based localization scheme for wireless sensor networks to mitigate shadowing effects[C]//Wireless Communications and Networking Conference (WCNC),IEEE,2014:3124-3129.
[7] Salim F,Williams M,Sony N, et al.Visualization of wireless sensor networks using ZigBee’s Received Signal Strength Indicator (RSSI) for indoor localization and tracking[C]//Pervasive Computing and Communications Workshops (PERCOM Workshops), 2014 IEEE International Conference on. IEEE,2014:575-580.
[8] 胡迪,钱松荣.基于RSSI自适应无线定位算法[J].计算机应用与软件, 2014, 31(9):139-141.
[9] 董振中,王恩博.无线传感器网络中一种基于定向天线的节点定位算法[J].电子技术,2010,37(10):7-9.
[10] Ou Chiaho.A Localization Scheme for Wireless Senor Networks Using Mobile Anchors with directional Antennas[J].Sensor Journal,IEEE,2011,11(7):1607-1616.
[11] Chen Y, Liu Z, Ding Y, et al. On sampling signal strength for localization using a directional antenna[C]//World of Wireless, Mobile and Multimedia Networks (WoWMoM), 2011 IEEE International Symposium on a. IEEE, 2011:1-6.
[12] Ou C H. A localization scheme for wireless sensor networks using mobile anchors with directional antennas[J]. Sensors Journal, IEEE, 2011, 11(7):1607-1616.
[13] Kanaris L, Kokkinis A, Raspopoulos M, et al. Improving RSS fingerprint-based localization using directional antennas[C]//Antennas and Propagation (EuCAP), 2014 8th European Conference on. IEEE, 2014:1593-1597.
[14] Jiang J R, Lin C M, Hsu Y J. Localization with rotatable directional antennas for wireless sensor networks[C]//Parallel Processing Workshops (ICPPW), 2010 39th International Conference on. IEEE, 2010:542-548.
[15] Hood B N,Barooah P.Estimating DoA from radio frequency rssi measurements using an actuated reflector[J].IEEE Sensors Journal,2011,11(2):413-417.
[16] 龚淼,冯友兵,卞建秀.基于移动锚节点的WSN节点定位方法[J].计算机科学,2013,40(11A):37-40.
[17] 李海涛,李燕,张建忠.微波定向天线对准实现方法[J].无线电工程,2011,41(3):44-46.
LOCALISATION BASED ON RSSI DIFFERENCE OF DIRECTIONAL ANTENNAS
Li XinchunLan Gen
(SchoolofElectronicsandInformationEngineering,LiaoningTechnicalUniversity,Huludao125105,Liaoning,China)
To solve the problems of directional antenna-based localisation method in real-time performance and accuracy, we propose an indoor localisation scheme which is based on RSSI differences of directional antennas, namely LRD. It uses the node with two directional antennas perpendicular to each other as the reference node, the angle variable of a directional antenna and the RSSI value can be fitted approximately into a parabola function when the regional distance covered by the antenna is unchanged. And for the difference of the RSSI values of two reference directional antennas captured by the target node, when the distance is unchanged the angle variable and the difference can be fitted approximately into a linear function. A target node can locate itself with the help of two kinds of functions. We also propose a method named largest density (LD) to improve the results of localisation. Experimental results show that this method can quickly locate the target and has higher localisation accuracy.
Directional antennaRSSI differenceLocalisationLargest density
2015-03-11。李新春,高工,主研领域:无线传感网络,嵌入式系统。兰根,硕士生。
TP393
A
10.3969/j.issn.1000-386x.2016.08.037
猜你喜欢
中华眼视光学与视觉科学杂志(2022年8期)2022-08-17
中成药(2022年1期)2022-01-27
空间科学学报(2020年4期)2020-04-22
科学与财富(2019年2期)2019-02-28
现代电子技术(2019年3期)2019-02-19
现代计算机(2018年19期)2018-08-01
通信技术(2018年4期)2018-05-05
现代测绘(2018年1期)2018-03-06
中学生数理化·七年级数学人教版(2017年1期)2017-03-25
测绘通报(2016年9期)2016-12-15