
基于AMESim与Matlab的液压调平系统仿真研究
2016-09-13 09:02山西中北大学机械与动力工程学院李艳高强陆辉山闫宏伟
河北农机 2016年2期
山西中北大学机械与动力工程学院 李艳 高强 陆辉山 闫宏伟
基于AMESim与Matlab的液压调平系统仿真研究
山西中北大学机械与动力工程学院李艳高强陆辉山闫宏伟
在民用工程领域中,往往需要将非水平状态的载重平台调整至水平状态,这对于设备的快速投入使用和物资的安全运输都有着非常重要的意义。本文采用自适应控制方法对调平支腿进行控制,并用Matlab和AMESim进行联合仿真,对其稳定性、快速响应性进行分析,结果表明自适应控制策略对载重平台调平过程中,四液压缸同步控制性能的提升有很
液压调平,自适应控制,AMESim
1 引言
在民用工程领域中,如大型钻机、沥青砂浆车[1-3]、重型起吊车、重型运输车辆等。在车辆行进过程中,为了确保运输的安全性,往往需要让载重平台尽可能地保持水平状态,以确保设备物资的安全。由于载重平台往往处于较为复杂的工作环境中,加上其工况有非线性事变的特点,因此设计一套液压自动调平控制系统,确保载重平台能够快速准确地调平是非常重要的。
2 自适应控制及算法分析
自适应控制有多种,本文采用模型参考自适应控制。模型参考自适应控制具有自适应速度快、其控制策略便于推广到一大类非线性系统的自适应控制中去的特点,其结构如图1所示。
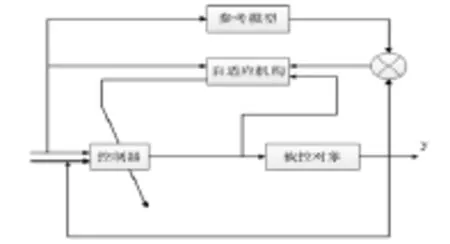
图1 模型参考自适应控制
根据文献[4]得到液压支腿的数学模型为
由于液压系统的稳定性以及响应速度还有欠缺,我们引进参考模型Gm(s),对液压系统进行修正,提高系统的稳定性和跟随性,参考模型为:

自适应机构根据一定的准则,利用广义误差信号来修改可调控制器参数,即产生一个自适应控制律,使e趋向于零。也就是使对象实际输出向参考模型输出靠近,最终达到完全一致。
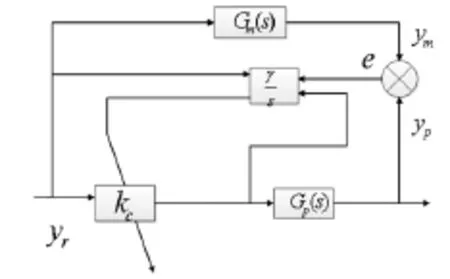
图2 MRAC系统结构
因为被控对象为Gp(s),参考模型为Gm(s),根据被控对象与参考模型结构相匹配的原则进行控制器的设计,结构如图2所示。
3 仿真分析
3.1建立仿真模型
选用比例阀来对流量进行调节[5],液压缸选择双作用单活塞杆液压缸,平台调平控制过程中针对液压缸工作模式采用了主从式,将其中一个液压缸的输出设定成为其余液压缸输出跟踪的理想值,建立同步控制系统的仿真模型系统如图3所示。
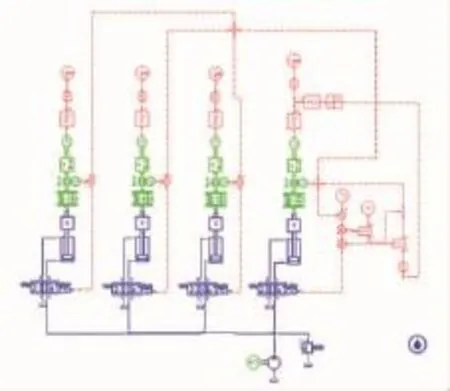
图3 AMESim仿真模型
通过S函数的形式,与Matlab/Simulink接口进行连接,建立联合仿真图如4所示。

图4 联合仿真模型仿真曲线如图5所示。
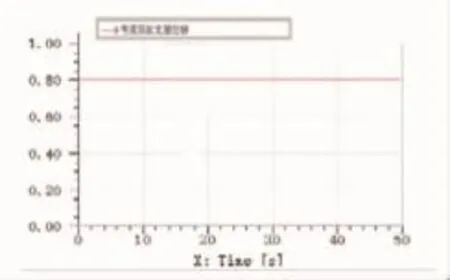
图5 4号液压缸支腿位移
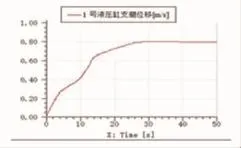
图6 1号液压缸支腿位移
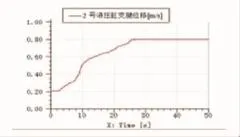
图7 2号液压缸支腿位移
图8 3号液压缸支腿位移
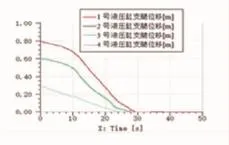
图9 液压缸支腿位移差
4 结论
由仿真结果可以看出,采用模型参考自适应控制的方法,可以实现四腿平台的调平,并且超调量小,调节时间短,响应速度快,鲁棒性强,可以看出自适应控制方法有效地克服液压系统地非线性、参数时变性、抗干扰波动的缺点,使控制更精确、快速。
[1]杨建红,房怀英,张认成.移动式沥青砂浆车液压调平系统试验研究[J].设备管理&维修技术,2011:83-86.
[2]蔡钟山.沥青砂浆车液压调平算法及实验研究 [D].华侨大学硕学位论文,2012.
[3]李宝,黄宜坚.砂浆车液压调平系统设计与控制 [J].机床与液压,2010,38(9):74-76.
[4]张远深,张园成,刘晓光等.基于AMESim与Simulink的变柔性负载实验台变频式电液控制系统建模与仿真研究[J].机床与液压,2011,39(7):121-123.
[5]陈庆华.大型液压设备四角调平控制系统的调平与应用[J].机械设计,2011.28 (6):81-84.

猜你喜欢
舰船科学技术(2022年11期)2022-07-15
机械工程与自动化(2020年4期)2020-08-25
机械制造(2020年1期)2020-03-04
自动化学报(2019年6期)2019-07-23
西安文理学院学报(自然科学版)(2018年5期)2018-11-16
航天工业管理(2017年4期)2017-05-12
中国教育信息化·基础教育(2016年12期)2017-04-15
军事运筹与系统工程(2016年3期)2016-09-26
科教导刊·电子版(2016年21期)2016-08-23
电脑知识与技术(2016年10期)2016-06-16
