基于MIT的伺服转台系统自适应控制
2016-09-16 02:56吕政轩刘云清
长春理工大学学报(自然科学版) 2016年3期
吕政轩,刘云清
(长春理工大学 电子信息工程学院,长春 130022)
基于MIT的伺服转台系统自适应控制
吕政轩,刘云清
(长春理工大学电子信息工程学院,长春130022)
伺服转台作为一个高精度的位置随动系统,提高其对高速目标的跟踪精度已经成为研究伺服转台的重要课题。针对这一问题,采用模型参考自适应控制的方法对伺服转台进行控制,基于MIT理论计算得到自适应控制律,完成控制系统的总体设计,最后使用Matlab/Simulink仿真软件对控制系统的性能进行仿真验证。结果表明,基于MIT理论设计的自适应控制系统结构简单,易于实现,且能够有效的提高伺服转台控制系统跟踪精度。
伺服转台系统;模型参考自适应控制;MIT
随着科技的发展,运动物体的运动速度、加速度已经有了明显的提升,因此对伺服转台控制系统的跟踪精度要求也日益提高。在非线性时变高速运动目标的跟踪领域,传统的控制方法很难达到理想的效果[1]。
本文针对两轴四框架伺服转台控制系统进行模型参考自适应控制系统设计,伺服转台控制系统模型基于速度环与位置环的双闭环理论建立,由于速度环与位置环的设计方法大体相同,故在文中以速度环的设计为例。文中采用MIT自适应控制,这种自适应控制方法是由麻省理工学院科研人员首次提出,并使用局部参数最优化的方法设计出了第一个真正意义上的自适应控制律。在计算得到系统数学模型的基础上,根据MIT方法得到自适应控制律,完成整个控制系统的设计。最后在Matlab/Simulink软件环境下,搭建控制系统的仿真框图,并通过仿真实验对所设计系统的控制效果进行验证。通过对比和分析,确定控制器对系统控制精度的提升效果。
1 伺服转台控制系统
伺服转台控制系统的主要用途是在航空航天领域中,搭载如CCD相机、摄像机等光学设备,它的工作过程是当给定一个系统输入时,伺服转台会连续地根据当前的误差来调整方位轴和俯仰轴,以确保运动目标不会脱离跟踪视野。图1所示即为伺服转台控制系统的双闭环结构框图[2]。
如图1所示,θi为系统输入即目标当前位置,ω是伺服转台的角速度和θo是系统的实际输出即伺服转台的角位置,角位置是角速度的积分,所以二者以积分环节链接,Δθ为角度误差。现代转台伺服系统大多采用位置环加速度环的双环控制模式,位置环主要用于保证伺服转台系统的精度,速度环系统主要作用是提高系统的刚度来抑制系统的非线性及外部扰动本文中对速度环采用模型参考自适应控制,位置环只需在速度环的基础上加入一个积分环节即可,控制方法同理,不再赘述。

图1 转台伺服系统框图
2 模型参考自适应控制
2.1模型参考自适应控制原理
模型参考自适应控制(Model Reference Adapting Control,后面简称为MRAC)是智能控制的一个分支,主要用于非线性系统的控制。模型参考自适应控制需要根据系统所需的性能指标设计理想参考模型,因此,对控制系统的数学建模和性能分析是必不可少的。MRAC控制器设计中最核心任务是自适应控制律的计算,MRAC中计算控制律的主要方法是采用确定等价法,在计算所得到的自适应控制律的基础上,建立整个系统的原理框图,其整体结构如图2所示。
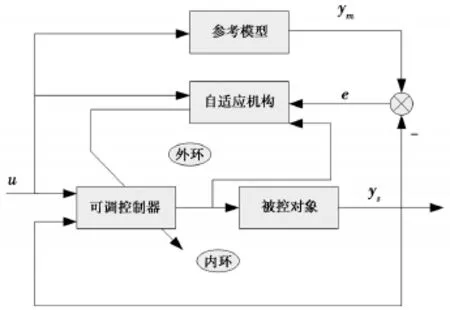
图2 MRAC系统原理框图
从图2中可以看到,整个MRAC控制系统可以分为内环和外环两个部分。其中内环被称为可调回路,它是一个由被控对象和可调控制器组成的一个反馈闭环回路;外环被称为自适应部分,它主要包含了根据自适应控制律设计的自适应控制器和根据控制系统所需性能指标选取的参考模型。其中参考模型与实际模型并联,二者输出之差称作控制系统的广义误差,当广义误差为零时,系统趋于稳定。因此,MRAC系统的工作过程为:当系统给定一个输入u时,实际模型的输出响应为ys,参考模型的输出响应为ym,由于两个模型有所差异,所以输出响应也会不同,二者的差成为广义误差e=ym-ys,当系统检测到广义误差后,自适应回路会根据当前的广义误差修改自身参数,从而改变可调控制器,使广义误差趋向于零,最终确保参考模型和实际模型的输出响应完全一致[3]。
为了提高伺服转台控制系统的精度,本文系统中选用的控制方法为模型参考自适应控制的方法。选取的参考模型以响应速度和稳态精度为主要技术指标,通过整个系统的自适应调节,确保实际模型输出响应可以趋近于参考模型的响应,并最终能够达到广义误差为零[1]。
2.2自适应控制律计算
设理想模型的传递函数为:

被控系统传递函数为:

系统广义误差为:

式中:Km—理想模型的开环增益;Kv—实际被控系统的开环增益;ym—理想模型的输出;ys—实际被控系统的输出。e为控制系统的广义误差,其值为输入相同时,参考模型与实际模型的输出响应之差,广义误差e是模型参考自适应控制系统的重要性能指标[4]。
选取性能指标泛函为:

广义误差e是影响J值的重要参数,系统的广义误差e是通过改变可调控制器的参数Kc进行控制。为使性能指标J能够达到最小值,本文中采用梯度法进行参数寻优,首先求出J对Kc的偏导数:

根据梯度法可知,若要控制系统趋于稳定,必须保证J值逐渐减小。故Kc值应沿梯度下降方向减小,当移动步距固定时,Kc的变化量ΔKc应取为:

式中:步距λ>0,调整后Kc的值为:

式中:Kc0—可调增益的初始值,ΔKc=Kc-Kc0。
上式两边同时对时间t求导,可以得到自适应控制律K.c:


将式(9)变形为:

对S域方程式(10)进行Laplace反变换即可得到其时域的表现形式:

式中:p—微分算子。
方程两边对Kc求导数得:

根据前面的推导,由于理想模型和实际模型属于并联关系,因此,理想模型具有如下的输入与输出关系:

观察式(12)和式(13),可以发现D(p)、Kv、均为常数,因此和ym(t)为比例关系。为了计算和设计的方便,在此用ym(t)代替微分信号,所以得到控制系统自适应律的新形式如下:

式中:

在此式中,μ为常数,e为系统广义误差,ym(t)为参考模型的输出响应,这些均为可测量,至此,自适应控制律推导完毕。
MIT自适应控制方案如图3所示。
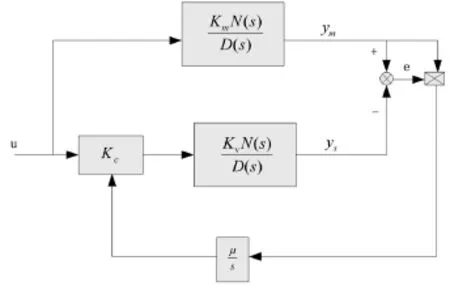
图3 MIT自适应控制方案
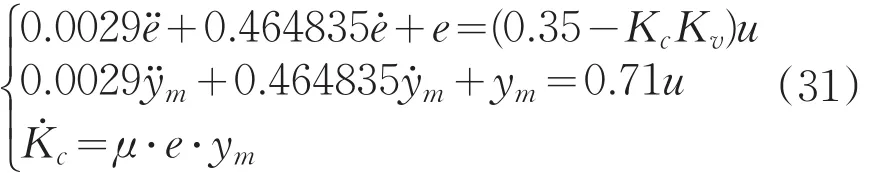
根据上述的计算推导,可以得出控制系统的数学描述方程组如下:

式中,第一个方程描述了控制系统的广义误差与输入的关系,第二个方程描述了参考模型与输入的关系,第三个方程描述了整个系统的自适应控制律。
3 速度回路的数学模型与系统仿真
3.1系统模型建立
在转台伺服控制系统中,速度环主要由PWM功率放大环节、电机数学模型环节、数字脉冲调宽环节组成,速度环模型如图4所示。
GP(s)是一个PWM功率放大器,通常可以看做比例环节,该环节通常为常数KP。

图4 速度环模型
伺服转台控制系统通过直流电机进行驱动,目前通常采用PWM技术进行直流电机调速[2]。据此可以求出驱动电机的数学模型,其性能参数如表1所示。
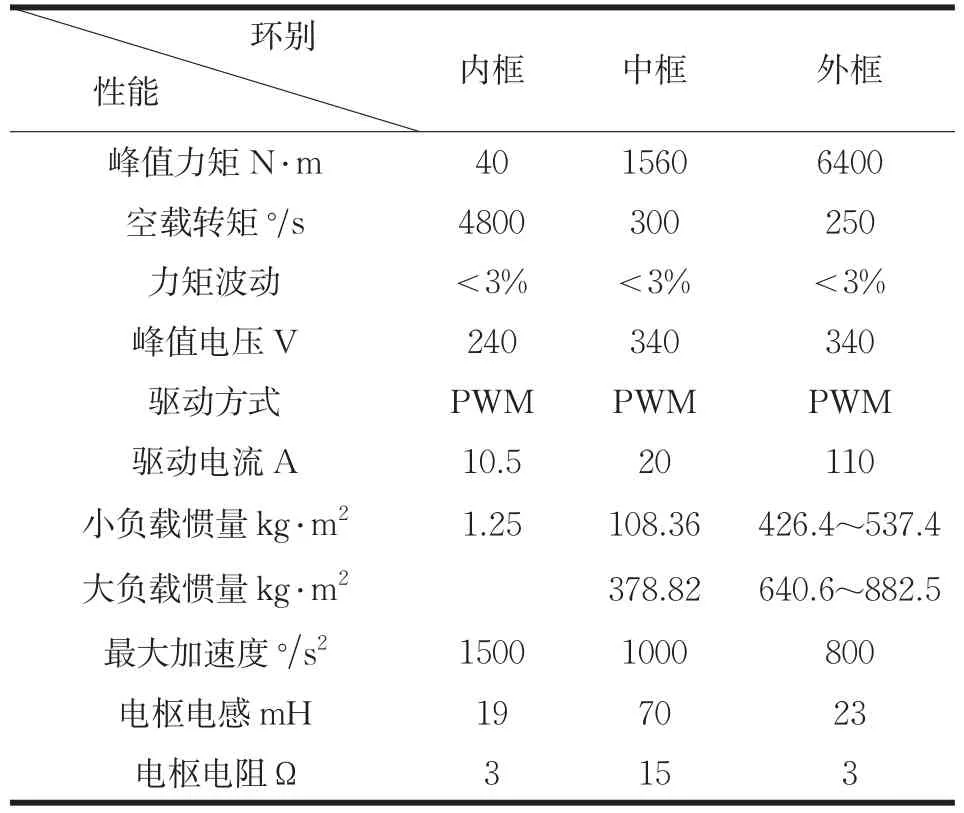
表1 通用直流力矩电机性能表
电磁转矩:

式中Tem—电磁转矩(N·m)/A;Ia—电枢电流A; Ki—电机力矩系数。
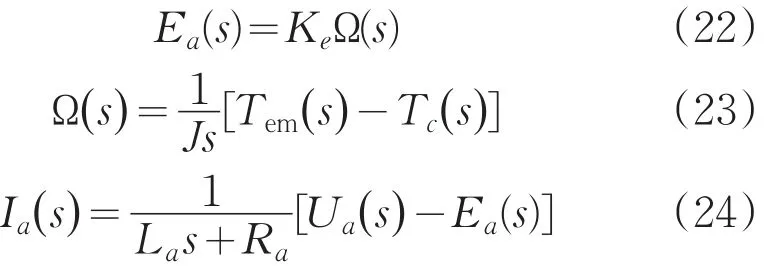
电枢反电势:

式中,Ea—电枢反电势;ω—电机转子角速度;Ke—反电势系数。
电机动态电压平衡方程:

式中,Ua—控制电压;La—电枢电感;Ra—电枢电阻;Ia—电枢电流;
电机动态转矩平衡方程:

式中,Tc—负载总转矩,又称干扰力矩;J—电机转动惯量J=JM+JL,J自身转动惯量,JL负载转动惯量。
将以上四式进行Laplace变换并整理得:

相应的电机框图如图5所示。
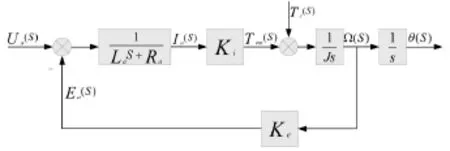
图5 直流力矩电机传递框图
假设外界条件为理想状态,即不存在干扰力矩Tc=0。以速度环为例,选定输出量为角速度Ω(s),经过整理可得直流力矩电机的数学模型为:

式中,τm为直流力矩电机的机电常数τe为直流力矩电机的电磁常数
GH(s)起到采样保持的作用,其数学模型相当于一个零阶保持器,通常直流PWM的工作频率为200Hz以上,所以TPWM的值很小,该环节可以等效为一个惯性环节。

由于TPWM≪τm、τe,故电机传递函数可以等效为一个二阶系统。
将表1中电机的相应参数代入式(24)进行计算,可得直流电机速度环的具体数学模型为:

3.2仿真与实验结果
控制系统中参考模型的选择,取决于系统对性能指标的要求,本文中选择具有较高稳态精度与较快响应速度的参考模型。在仿真过程中,分别对参考模型和实际模型的输出响应,以及系统的广义误差进行观察。分析系统广义误差的变化规律,以及实际模型对参考模型的跟踪效果。
相较于其他理论,MIT规则只考虑性能指标泛函数的局部最优解,因此系统设计较为简单,在实际工作中也更容易实现。然而,MIT规则具有其局限性,当系统输出或自适应增益过大时,响应曲线不收敛,系统不稳定。
根据响应性能指标,选择系统的参考模型为:

分母展开可得:

可调系统的传递函数是:

因为广义误差e=ym-ys,故将式(29)(30)代入自适应系统数学描述方程组:
现设定控制系统的输入u幅值为10的阶跃信号,Kv的取值范围是0.5~1.3,通过计算整理可得:
对式(23)进行Laplace变换可得:

若要闭环系统能够稳定,根据Routh判据[5],有:

根据Kv的取值范围,当Kv=0.5时,得到确保系统稳定的μ取值范围:

图6为控制系统的仿真框图,各部分结构如图所示[7]。

图6 系统仿真框图
3.3实验结果
本文中提出使用模型参考自适应控制的方法来控制速度环[6]。通过使用MIT原理来推导自适应控制律。根据计算得出的μ取值范围,在仿真实验中取μ=7,系统输入u=10。则在Matlab/Simulink软件中可得到实际模型与参考模型的输出曲线如图7所示。

图7 控制系统阶跃响应信真曲线
如图7可见,细线为理想模型的响应曲线,粗线为实际模型响应曲线。实际模型最大超调量σ%=10%,调节时间ts=0.2s,上升时间tr=0.15s,稳态误差ess=0。当μ在合适范围内选取时,系统稳定。
广义误差仿真曲线如图8所示。
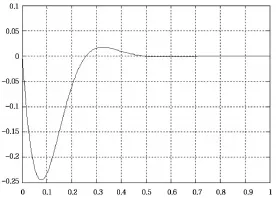
图8 控制系统广义误差仿真曲线
如图8可见,由于实际系统与参考模型的差异,在初始状态,系统存在较大误差,在自适应控制律的调节下,误差逐步缩小,直到0.5s之后,实际系统与参考模型之间误差为0,二者无限接近,控制系统到达稳定状态。结合图7、图8可知,模型参考自适应控制系统动态性能和静态性能能够满足设计要求。
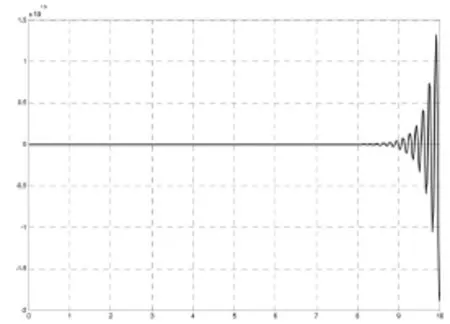
图9 μ=7,u=80时系统的阶跃响应曲线
按照MIT理论,如果自适应增益过大,或者输入信号的幅值过大,都有可能使系统不稳定。为了验证这一点,分别取μ=7,u=80和 μ=50,u=10两组数据进行仿真,并进行对比。系统的阶跃响应曲线如图9、图10所示。

图10 μ=50,u=10时系统的阶跃响应曲线
在图9和图10中,细线为理想模型响应曲线,粗线为实际模型响应曲线。可见,当自适应增益或输入信号幅值过大时,系统不稳定。
4 结论
本文基于MIT规则采用模型参考自适应控制的方法,对伺服转台控制系统的速度环进行了自适应控制器的设计。在自适应系统中,自适应控制律的优劣直接影响控制系统的整体性能指标,因此文中对控制系统的自适应控制律进行了详细的推导。最后通过仿真实验对设计的控制系统进行检验,可以看出,当系统输入和自适应增益选择适当时,实际模型的输出响应能够完成对参考模型的跟踪,系统具有良好的动态和静态特性。
伺服转台控制系统是一个具有时变非线性的高精度的位置随动系统,模型参考自适应控制是应对系统的非线性和随机性等问题的有效方法。当跟踪高速目标时,模型参考自适应控制能够有效的提高伺服转台控制系统跟踪精度。
[1]董宁.自适应控制[M].北京:北京理工大学出版社,2009:29-105.
[2]梅晓榕,王坚.三轴转台的自适应控制[J].航天工程,2007,7(1):9-11.
[3]Torben Andersen.The servo system of the EISCAT svalbard antenna[J].SPIE,1995(2479):301-324.
[4]宫玉琳.永磁同步电动机自适应逆控制系统设计[J].长春理工大学学报:自然科学版,2015,38(4):61-64.
[5]王建辉,顾树生.自动控制原理[M].北京:清华大学出版社,2007:139-150.
[6]林森.提高光电跟踪伺服系统精度关键技术研究[D].长春:长春工业大学,2012.
[7]刘兴堂,吴晓燕.现代系统建模与仿真技术[M].西安:西北工业大学出版社,2001:125-170.
[8]郑南宁,贾新春,袁泽剑.控制科学与技术的发展及其思考[J].自动化学报,2002,28(增1):7-17.
Adaptive Control of Servotable System Based on MIT
LV Zhengxuan,LIU Yunqing
(School of Electronics and Information Engineering,Changchun University of Science and Technology,Changchun 130022)
Currently,the speed of moving object is more and more fast.As a high-accuracy position servo system,it has become an important project that improving the tracking accuracy of high-speed object.To solve this problem,controlling the servotable by the way of model reference adaptive control.And calculating based on the principle of MIT to obtain the adaptive control law based on the principle of MIT.At last,the performance of the control system was validated by using Matlab/Simulink simulate software.Adaptive control system based on MIT is simple,easily achievable and can be applying to common control system.
servo system;model reference adaptive control;MIT
TP273.2
A
1672-9870(2016)03-0050-06
2015-12-29
吕政轩(1989-),男,硕士研究生,E-mail:liuanfengdi@126.com
刘云清(1970-),男,教授,博士生导师,E-mail:234577142@126.com
猜你喜欢
汽车维修技师(2019年7期)2020-01-16
汽车维修技师(2018年11期)2018-05-11
中学生数理化·高一版(2017年1期)2017-04-25
中国教育信息化·基础教育(2016年12期)2017-04-15
军事运筹与系统工程(2016年3期)2016-09-26
电脑知识与技术(2016年10期)2016-06-16
自动化学报(2016年8期)2016-04-16
西北工业大学学报(2015年1期)2016-01-19
哈尔滨师范大学自然科学学报(2015年6期)2015-04-23
哈尔滨师范大学自然科学学报(2015年6期)2015-04-23