
基于遗传算法的空间伸展臂展开过程优化控制*
2016-10-19 07:03刘建文丁洁玉耿国志
动力学与控制学报 2016年1期
刘建文 丁洁玉 耿国志
(青岛大学计算机科学技术学院,青岛 266071)
基于遗传算法的空间伸展臂展开过程优化控制*
刘建文 丁洁玉 耿国志
(青岛大学计算机科学技术学院,青岛 266071)
针对空间伸展臂展开过程建立多体系统动力学模型,并以控制力为变量建立优化控制模型,通过最优控制力的选取,使空间伸展臂得以平稳、快速展开.为了避免基于梯度的优化方法在寻找最优控制力过程中大量复杂的灵敏度计算,采用遗传算法进行全局寻优.同时,优化迭代过程中动力学方程采用高阶变分数值积分方法求解,具有更高的稳定性.最后,以剪叉式空间伸展臂为例,利用遗传算法对其展开过程进行优化控制.
空间伸展臂,多体系统动力学,优化控制,遗传算法,高阶变分数值积分方法
引言
空间伸展臂作为一种空间可展结构[1-4],近年来在太空探索、对地观测、海洋勘探和军事侦察等空间活动中应用越来越广泛.空间伸展臂具有折叠和展开两种状态,在地面及发射过程中处于折叠状态,进入预定轨道后,根据地面的控制指令逐步完成展开,然后锁定并保持为工作状态.其中,展开过程是最容易出现故障的环节之一,故障现象主要为两个方面:一是在太空中不能顺利展开;二是展开过程不平稳,使其受到过大冲击而损坏[5].因此,需要在设计阶段对空间伸展臂展开过程进行动力学仿真分析,并对展开控制力进行优化,以使其平稳、快速展开.
基于梯度的优化方法在寻找最优控制力的过程中,如果初始值选取不当,容易陷入局部最优解.另外,大量复杂的灵敏度计算[6]使其效率较低.遗传算法(Genetic Algorithm,GA)是一种建立在自然选择和基因遗传学原理基础上的随机并行搜索算法,它在解空间内进行启发式搜索,从而快速地进行全局寻优[7].简单遗传算法在解决复杂问题时存在着早熟收敛和收敛速度慢等问题,国内外学者针对这些问题进行了大量研究[8-10],并取得了一定的进展和突破.其中,文献[11]、文献[12]、文献[13]对自适应遗传算法(Adaptive Genetic Algorithm,AGA)进行了研究,文献[11]提出的优势遗传新观点,在一定程度上有效地解决了遗传算法的早熟问题.另外,在控制方面[14],遗传算法也有相关的应用研究,文献[15]研究了模糊控制规则的优化问题,使用遗传算法优化模糊规则,然后将模糊控制器应用于智能悬臂梁的振动控制,并取得了良好的振动控制效果.
本文基于系统动力学和运动学规律,在满足系统性能、几何尺寸关系等因素的约束范围内,使用遗传算法对空间伸展臂的展开过程进行优化控制研究.
1 优化控制数学模型
在空间伸展臂展开过程动力学优化控制问题中,控制变量为展开控制力f,系统的状态变量q= [q1,q2,…,qn]T用于描述系统的动态响应,与其对应的动力学方程称为状态方程.
空间伸展臂系统中主动力包括有势力和非有势力,由哈密尔顿原理可得

其中,增广Lagrange函数

T(q,.q,t)为系统动能,V(q,t)为系统势能,Φ(q,t)为约束函数,λ为对应的Lagrange乘子,δW为非有势力的虚功,δW=δqTF(q,.q,t).
将[0,tf]划分为N个步长为h的时间区间,

则广义坐标、广义速度和拉格朗日乘子分别可写为
式(1)可表示为


在空间伸展臂展开过程中,先用欧拉法或龙格库塔法,由初始状态q0、.q0计算q1、.q1和λ1,然后再用牛顿迭代法,由式(4)计算qi,.qi,λi,i=2,3,…,N.
空间伸展臂展开过程动力学优化控制问题的目标函数与状态和时间有关,这正是该类系统优化问题比传统优化问题的困难所在.目标函数是评价控制方案优劣程度的标准,可写为如下一般形式


同时,控制变量还会受到约束条件的限制,约束条件的离散形式可写为

这样,空间伸展臂展开过程优化控制问题可归结为如下受等式和不等式约束的一般非线性动态优化问题:

2 遗传算法
式(8)可采用传统的基于梯度的优化方法求解,但其计算过于繁琐,效率较低,本文采用遗传算法进行求解.控制变量f作为遗传算法的个体,种群中的个体代表问题的可能解,通过一代一代的进化,找出满足要求的最优解.遗传算法通常包括初始化、适应度评价、选择、交叉、变异等步骤.
2.1 初始化
个体采用二进制编码,编码长度为chromlen,种群大小为popsize,随机产生初始种群.个体编码对应的十进制数为decimal,通过

2.2 适应度评价
适应度函数:

每代种群中适应度值最大的个体,即是该代所有个体中带约束优化问题式(8)的最优解.若不满足退出条件,则进行选择、交叉、变异,产生新一代种群;否则,退出进化历程并得到当前最优控制力.
2.3 选择
按照适应度高低,使用轮盘赌选择法从当前种群中选择个体作为父代个体,这样,适应度高的个体有更大的可能性被选为父代个体.
2.4 交叉
选择两个个体根据交叉概率进行均匀交叉.在简单遗传算法中,交叉概率为一常数pc∈[0.75,0.95].自适应遗传算法能够根据个体的适应度动态调整交叉概率,从而有效提升算法的全局寻优性能.优势遗传中,适应度高的个体以较高的概率进行交叉,适应度低的个体以较低的概率进行交叉,这样能更有效地产生优势个体,其交叉概率如下:

其中f′为两个交叉个体中较大的适应度值,fmax为种群中最大的适应度值,favg为每代种群的平均适应度值,Pc1=0.9,Pc2=0.6.
2.5 变异
对于种群中的每个个体根据变异概率进行均匀变异.在简单遗传算法中,变异概率为一常数.优势遗传中,适应度高的个体以较低的概率变异,适应度低的个体以较高的概率进行变异,其变异概率如下:

其中f为变异个体的适应度值,Pm1=0.5,Pm2=0.5.
2.6 精英保留
若新一代种群最优个体的适应度比当前种群最优个体的适应度低,则把当前种群的最优个体保留下来,替换掉新一代种群的最差个体,保证算法最终收敛于全局最优.
3 算例
图1为剪叉式空间伸展臂[16]的一个剪叉单元,由剪式铰和直角双转副构件进行合理配置与铰接而成,其中每个侧面为一个剪式铰,上下两个端面则由直角双转副构件通过滑动副连接而成.伸展臂承受一定的载荷,通过驱动力使底面直角双转副构件沿底面四边形对角线方向移动,即可实现剪叉单元的折叠和展开,完全展开状态下剪式铰剪杆夹角为90度.在折叠和展开过程中,剪杆长度保持不变,横杆通过滑动副改变其长度.

图1 剪叉式空间伸展臂剪叉单元Fig.1 The unit of scissor space deployablemast
杆件密度ρ=3000kg/m3,截面积A=0.03× 0.03m2,剪杆长度l1=1.6m,折叠状态下剪杆夹角θ1=10°,承受载荷r=5N,驱动力f=50N.为使伸展臂展开速度保持在0.25m/s,求最优控制力f(t).
状态变量取为

控制变量为驱动力f,广义力矩阵为

在遗传算法中,个体采用20位二进制编码,种群大小为30,最大进化代数为100.时间步长h= 0.01s,每一步都使用遗传算法对控制力进行优化,同时在优化过程中动力学方程采用高阶变分数值积分方法(此算例中使用的是一阶Lagrange插值-两点Gauss积分,记为P1L-Q2G)进行求解.其中,伸展臂从折叠状态0m/s达到目标展开速度0.25m/s的过程中,为了使控制力不至于过大,通过对控制力的优化,使展开速度沿着平滑的曲线逐渐过渡到0.25m/s.之后,继续优化控制力,使展开速度维持在0.25m/s,直到达到完全展开状态.

图2 展开速度曲线Fig.2 Time history of deployment speed

图3 控制力曲线Fig.3 Time history of control force
从图2和图3可以看出,通过优化控制力,伸展臂展开速度基本保持在0.25m/s,能够使其平稳、匀速展开.在0~1s,伸展臂由折叠状态0m/s平滑过渡到0.25m/s,需要较大的控制力;之后由于伸展臂已经具有0.25m/s左右的速度,只需要一个较小的控制力,即可使其展开速度维持在0. 25m/s.如图4所示,伸展臂在0s时处于折叠状态,在4.58s时达到完全展开状态.
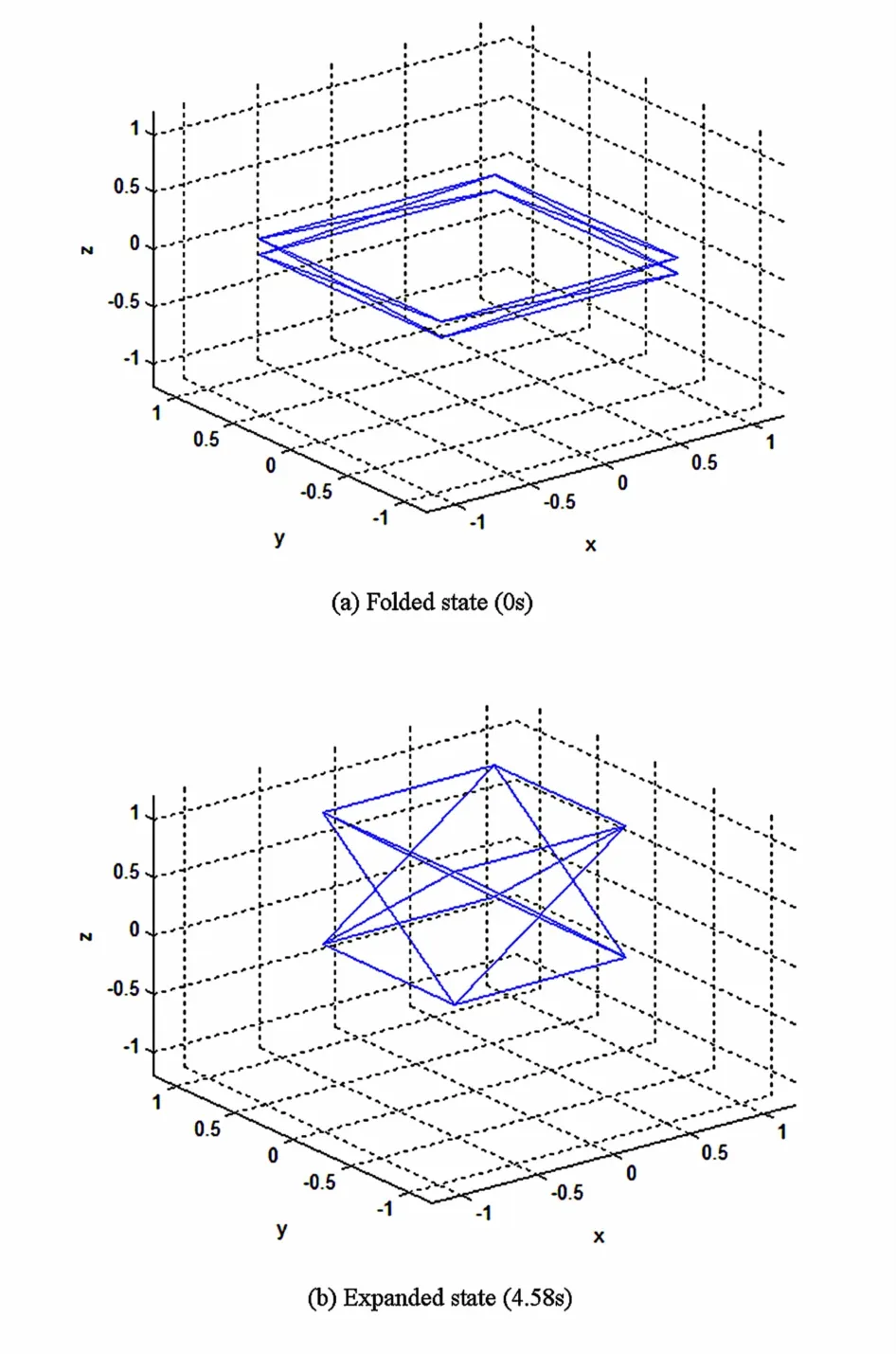
图4 剪叉式空间伸展臂位形图Fig.4 The position diagram of scissor space deployablemast
表1是使用Runge-Kutta法和本文的高阶变分数值积分方法(此算例中为P1L-Q2G)在运行时间、约束误差、目标速度误差和遗传算法进化代数等方面的结果比较分析.

表1 展开过程方法比较Table 1 Comparison of themethod on the deployment process
从表中可以看出,Runge-Kutta法和本文的P1L-Q2G法都能使目标展开速度保持在允许的误差范围内.但在约束误差方面,本文方法误差较小,具有较高的稳定性,优于Runge-Kutta法,适合高精度、长时间的仿真.同时,与Runge-Kutta法相比,本文方法运行时间稍长,优化过程中遗传算法的进化代数也稍大.
4 结论及展望
本文针对空间伸展臂展开过程建立多体系统动力学模型,并以控制力为变量建立优化控制模型,使用自适应遗传算法有效地选取最优控制力,达到展开过程优化控制的目的.后续工作将进行遗传算法与基于梯度的优化方法之间的比较分析,并对遗传算法的局部搜索能力和收敛速度进行进一步的研究提高.
1 岳建如.空间可动结构设计与控制分析[博士学位论文].杭州:浙江大学,2002(Yue JR.The structural design and control analysis[PhD Thesis].Hangzhou:Zhejiang University,2002(in Chiniese))
2 张京街.弹簧驱动空间可展桁架结构设计与分析理论研究[博士学位论文].杭州:浙江大学,2001(Zhang JJ. Design and analysis researches for truss structure driven by spring[PhD Thesis].Hangzhou:Zhejiang University,2001(in Chiniese))
3 刘亮.桁架可展天线展开过程分析、控制及试验[博士学位论文].杭州:浙江大学,2010(Liu L.Analysis,control and experiment truss deployable antenna deployment process[PhD Thesis].Hangzhou:Zhejiang University,2010(in Chiniese))
4 胡国伟.可展开天线展开动力学分析与仿真研究[博士学位论文].西安:西安电子科技大学,2011(Hu GW. Dynamics analysis and simulation of deployable antenna deployment[PhD Thesis].Xi'an:Xidian University,2011 (in Chiniese))
5 李团结,张琰,段宝岩.周边桁架可展开天线展开过程运动分析及控制.西安电子科技大学学报,2007,34(6):916~921(Li T J,Zhang Y,Duan B Y.Deployment kinematic analysis and controlofhoop truss deployable antenna.Journal of Xidian University,2007,34(6):916~921 (in Chiniese))
6 丁洁玉.基于多体系统的灵敏度分析及动态优化设计[博士学位论文].上海:上海大学,2008(Ding J Y,Sensitivity analysis and design optimization of multibody systems[PhD Thesis].Shanghai:Shanghai University,2008(in Chiniese))
7 王小平,曹立明.遗传算法-理论、应用与软件实现.西安:西安交通大学出版社,2002(Wang X P,Cao L M. Genetic algorithms-theory,application and software.Xi′an:Xi′an Jiaotong University Press,2002(in Chiniese))
8 马永杰,云文霞.遗传算法研究进展.计算机应用研究,2012,29(4):1201~1206(Ma Y J,Yun W X.Research progress of genetic algorithm.Application Research of Computers,2012,29(4):1201~1206(in Chiniese))
9 Pandey H M,Chaudhary A,Mehrotra D.A comparative review of approaches to prevent premature convergence in GA.Applied Soft Computing,2014,24:1047~1077
10 周洪伟,原锦辉,张来顺.遗传算法"早熟"现象的改进策略.计算机工程,2007,33(19):201~203(Zhou H W,Yuan JH,Zhang L S.Improved politics of genetic algorithms for premature.Computer Engineering,2007,33 (19):201~203(in Chinese))
11 Srinivas M,Patnaik LM.Adaptive probabilities of crossover and mutation in genetic algorithms.Systems Man& Cybernetics IEEE Transactions on,1994,24(4):656~667
12 任子武,伞冶.自适应遗传算法的改进及在系统辨识中应用研究.系统仿真学报,2006,18(1):41~43(Ren Z W,San Y.Improved adaptive genetic algorithm and its application research in parameter identification.Journal of System Simulation,2006,18(1):41~43(in Chinese))
13 陈世哲,刘国栋,浦欣等.基于优势遗传的自适应遗传算法.哈尔滨工业大学学报,2007,39(7):1021~1024 (Chen SZ,Liu G D,Pu X,etal.Adaptive genetic algorithm based on superiority inheritance.Journal of Harbin Institute of Technology,2007,39(7):1021~1024(in Chinese))
14 次永伟,邱大芦,付乐平等.航天器振动试验控制技术进展.动力学与控制学报,2014,12(3):193~200(Ci YW,Qiu D L,Fu L P,et al.Progress in spacecraft vibration testing control technology.Journal of Dynamics and Control,2014,12(3):193~200(in Chinese))
15 张京军,郭晓品,何丽丽等.改进遗传算法在智能悬臂梁模糊控制的应用.动力学与控制学报,2011,9(1):58~63(Zhang JJ,Guo X P,He L L,etal.Application of improved genetic algorithm in fuzzy control for intelligent cantilever beam.Journal of Dynamics and Control,2011,9(1):58~63(in Chinese))
16 徐国民.剪叉式空间伸展臂设计及其模拟装置研制[博士学位论文].杭州:浙江理工大学,2013(Xu G M. Design of scissor space deployable mast and development on its prototype[PhD Thesis].Hangzhou:Zhejiang Sci-Tech University,2013(in Chinese))
OPTIMAL CONTROL ON DEPLOYMENT PROCESSOF SPACE DEPLOYABLE MAST BASED ON GENETIC ALGORITHM*
Liu Jianwen Ding Jieyu Geng Guozhi
(College of Computer Science&Technology,Qingdao University,Qingdao 266071,China)
Themodel ofmultibody system dynamics for the deployment process of space deployablemast is firstly established in this paper.The optimal controlmodel is then developed by selecting the control force as a variable. And the selection of the optimal control force results in the smooth and rapid deployment of the space deployable mast.To avoid a large number of complex sensitivity calculation based on gradient-based optimization method in the process of finding optimal control force,genetic algorithm is used to search global optimization in this paper. Meanwhile,higher-order variational numerical integration method is employed to solve dynamics equation in the iterative optimization process,which leads to high stability.Finally,taking the scissor space deployablemast as an example,the genetic algorithm is utilized to control its deployment process optimally.
space deployable mast,multibody system dynamics,optimal control,genetic algorithm,high-order variational numerical integration method Received 23 Septerber 2015,revised 29 October 2015.
E-mail:djy@qdu.edu.cn
10.6052/1672-6553-2015-075
*The project supported by the National Natual Science Foundation of China(11272166,11472143)
2015-09-23收到第1稿,2015-10-29收到修改稿.
*国家自然科学基金资助项目(11272166,11472143)
E-mail:djy@qdu.edu.cn
猜你喜欢
计算机仿真(2022年8期)2022-09-28
辽宁师专学报(自然科学版)(2021年1期)2021-07-21
家庭影院技术(2020年6期)2020-07-27
初中生世界·八年级(2019年6期)2019-08-13
郑州大学学报(工学版)(2018年2期)2018-04-13
小学生导刊(低年级)(2016年9期)2016-10-13
小学生导刊(低年级)(2016年6期)2016-07-02
商场现代化(2016年12期)2016-06-06
中国塑料(2016年11期)2016-04-16
西安交通大学学报(社会科学版)(2015年6期)2015-05-20
