
涡扇发动机极值限制保护闭环控制设计
2016-10-26 02:35李志鹏
航空发动机 2016年5期
王 曦,李志鹏
(1.北京航空航天大学能源与动力工程学院,北京100083;2.先进航空发动机协同创新中心,北京100083;3.中航工业航空动力控制系统研究所,江苏无锡214063)
涡扇发动机极值限制保护闭环控制设计
王曦1,2,李志鹏3
(1.北京航空航天大学能源与动力工程学院,北京100083;2.先进航空发动机协同创新中心,北京100083;3.中航工业航空动力控制系统研究所,江苏无锡214063)
现代高性能涡扇发动机采用分段组合多变量控制计划,以发挥发动机工作在整个飞行包线范围内的气动热力设计潜力。为保证发动机在过渡态工作的安全性,控制系统中必须考虑极值限制保护控制的设计问题。为避免直接限制保护控制引发的不同控制通道切换带来的系统震荡问题,提出1种高回路稳态增益的滞后-超前频域校正间接极值限制保护控制器设计方法,在保证限制回路足够的稳态精度和抗噪声能力的同时,又避免了引入积分环节导致相角裕度损失过大的缺点。通过发动机线性模型和非线性模型的控制系统仿真,验证了所述方法设计限制控制器的有效性。
极值限制保护控制;涡扇发动机;闭环回路;高回路稳态增益;滞后-超前校正
0 引言
涡扇发动机限制保护控制是辅以稳态控制和过渡态控制共同保证发动机既能获得期望性能又不使气动热力参数超出安全极值范围的重要手段,发动机在飞行包线内工作所表现出的气动热力学性能参数随发动机进口条件变化很大[1-2],且其性能随工作时数的增加发生衰退。在控制系统中,仅考虑稳态控制计划及过渡态控制计划难以保证发动机气动热力参数不超出各自的工作极限范围,若出现控制精度不够、执行机构响应不快、操作不当等不确定性原因,在某种条件下,发动机仍有可能出现超转、超温、超压以及喘振等情况。为保护发动机工作安全可靠,还需设置超限保护装置,作为稳态控制和过渡态控制的补充[3-4],典型应用如俄制АЛ31Ф发动机液压机械主燃油控制系统[5]中设置了大慢车温度修正凸轮,对转速给定凸轮的转速参考指令进行修正,从而保证了发动机转速不会在某种飞行条件下超出工作范围。已发表的文献大多数关注对稳态控制器的设计,避开了更为重要的限制保护的问题,对军用发动机来说,这一点至关重要。限制保护的重要性一方面体现在对发动机工作参数的限制保护;另一方面,为了让发动机发挥出更大的潜能,需要使发动机各参数尽可能靠近各自的工作极限,同时又不能让其超出限制边界,换句话说就是通过降低控制系统的保守性来换取更好的发动机性能。
为了保证航空发动机安全工作,在飞行包线内的任何工作状态下,控制系统都需要对发动机关键气动热力参数进行限制保护。这些受限制保护的参数有:低压转子转速N1超转;高压转子转速N2超转;压气机出口静压Ps3超压;发动机排气温度EGT超温;风扇、压气机喘振;此外还有Ps3的最低限制,以及最小燃油限制等。对于高增压比的军用发动机,还应考虑压气机出口总温T3的限制,以防止压气机后面几级的轮缘处不会因过大的温差应力而导致破裂[3]。
目前,先进的涡扇发动机均采用数字电子控制,相比以往的液压机械控制,其优势在于使越来越复杂的控制规律、逻辑计划的实现变为可能。设计极值限制保护控制中采用的直接限制保护方式易引发多控制通道切换工作所带来的控制系统震荡的不稳定问题。
针对上述难点,本文提出了1种高回路稳态增益的滞后-超前频域校正设计限制保护控制器的间接方法,与直接硬性极值限制保护方式相比,间接极值限制在设计间接极值限制保护控制器时考虑了主控回路之前已设计出的控制器的补偿影响,并通过提前修正闭环负反馈参考指令的方式实现柔性限制保护,该方法的可行性和优越性通过本文涡扇发动机控制系统的数字仿真得以验证。
1 极值限制控制原理
闭环式限制保护从结构上可分为2类:直接限制和间接限制。直接限制式,即以直接限制燃油指令的方式为手段,通过高低选策略来保证各类参数不超限,直接限制保护结构1[6]和直接限制保护结构2[7-11]的结构分别如图1、2所示。
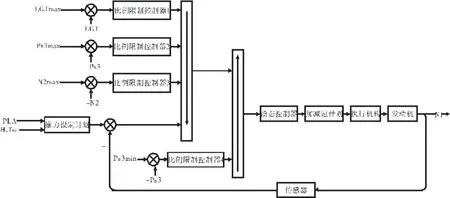
图1 直接限制保护结构1
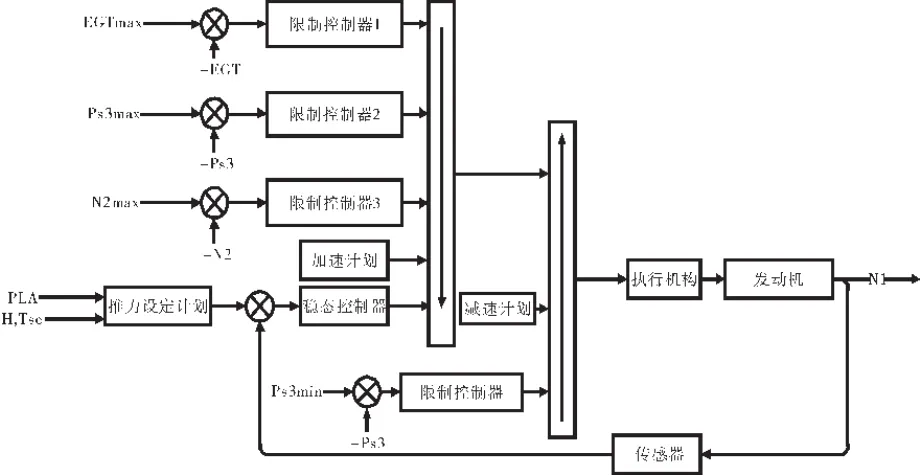
图2 直接限制保护结构2
从图1中可见,各限制回路与主控回路共用1个稳态控制器,这就要求对限制回路的反馈偏差与主控回路的反馈偏差进行高低选择,即对上限的保护采用低选选择器,对下限的保护采用高选选择器,通过一系列高低选逻辑决策出的某路闭环偏差信号,经过稳态控制器的调节,所计算出的燃油指令再与加减速计划计算出的燃油指令进行高低选逻辑决策,可获得能满足所有参数被限制的燃油指令,最后通过燃油执行机构供给发动机燃烧室。图1中的限制控制器可采用比例因子,由于限制控制器与主控回路共用相同的稳态控制器,可按将不同限制回路的偏差折算到主控回路的偏差的方法设计其比例限制控制器,而对于大惯性环节的限制变量可采用超前滞后校正环节。
从图2中可见,将各限制回路的控制器与主控回路的稳态控制器分开设计,各控制器各自输出的燃油指令值再和加减速计划计算出的燃油指令值通过高低选逻辑策略,选出最合适的某一路燃油指令作为执行机构的输入。在美国的CMAPSS40k模型中采用了这样的结构[7,11]。由于各路限制控制器均需进行单独设计,同时还需考虑各控制器之间的抗积分饱和问题,且这种结构引入了更多的自由度,相比前一种方案更为复杂。
间接限制即通过修正主控回路的参考指令的方式间接限制燃油指令,从而达到限制保护的目的,间接限制保护结构[3]如图3所示。
从图3中可见,受主控回路控制器的影响,该设计方法相对前2种直接限制保护结构较为复杂,其结构特点是限制控制器只在参数超限后才输出非零值,否则输出为零。直接限制结构存在极限环问题,这是因为在发动机处于限制边界时,多个控制器会来回抢夺发动机的控制权,直接导致系统的震荡。间接限制结构则不存在这样的问题,原因为限制作用是对主控回路的参考指令进行修正,通过加或减的修正主控回路的参考指令方式来间接防止发动机超过其工作极限,因此不会造成各控制回路之间的来回切换问题。
为实现既能对发动机气动热力参数的限制保护控制,又能避免各控制器之间的工作切换引发的系统震荡问题,本文以民用涡扇发动机为例,在下文中针对第2类间接限制式保护结构提出1种限制保护控制器的设计方法。
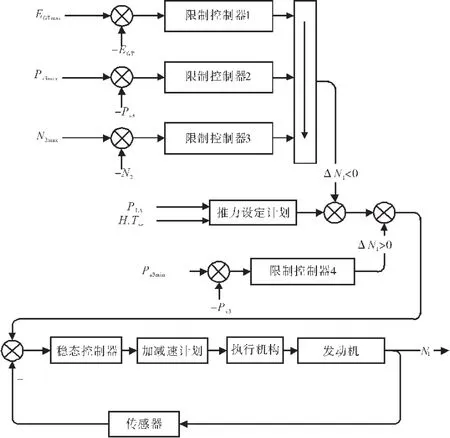
图3 间接限制保护结构
2 间接限制控制器设计
民用涡扇发动机系统气动截面如图4所示。
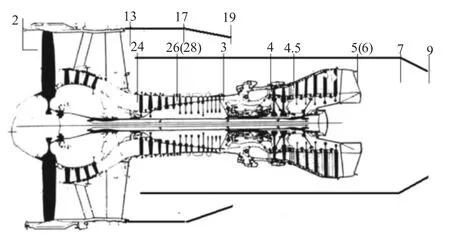
图4 民用涡扇发动机气动截面
在民用涡扇发动机中,起飞推力设定计划采用低压转子转速N1按发动机进口总温变化的函数关系规律进行控制,以对起飞推力实现间接控制;同时,要求对高压转子转速N2、高压压气机出口静压Ps3以及高压涡轮出口总温T45进行限制保护控制。
以高压涡轮出口总温T45限制控制器的设计为例展开讨论。T45限制控制器与主控回路N1的耦合结构关系如图5所示。
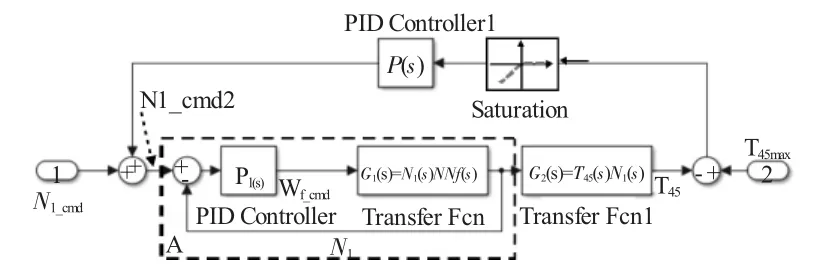
图5 EGT限制保护结构
在图5中虚框A中的闭环回路为N1伺服跟踪回路。对T45设计限制控制器,提出以下限制控制器的设计步骤:
(1)分别求出从燃油到转速的传度函数G1(s)和从转速到温度的传递函数G2(s);
(2)对闭环N1伺服跟踪回路设计PI闭环反馈控制器;
(3)将N1伺服跟踪回路的闭环传递函数与G2(s)串联,以此构成G3(s)传递函数;
(4)对T45闭环回路设计闭环反馈限制控制器,并进行仿真验证。
在设计过程中,对于G3(s)传递函数应特别注意2个问题:传递函数是否稳定;传递函数是否严格正则。
如果G3(s)传递函数不满足稳定性,即传递函数出现了右半平面的极点,则会给该限制控制器的设计带来挑战,此时就需要重新权衡选择该结构是否真的比上述第1类限制保护结构更优越。如果G3(s)传递函数不满足正则性,则需要观察虚框A中的闭环回路与G2(s)串联后是否满足严格正则性,若仍不满足,则在设计控制器时就必须满足关于相对阶次的约束,以保证从T45指令到G2(s)输出的开环传递函数是严格正则的,否则在仿真中将出现代数环。值得注意的是,在真实发动机中,不会出现这种非正则的现象,在计算机仿真时会出现这样的情况是因为在建立发动机仿真模型时,忽略了真实的高阶动态,而这种忽略又是必须且不可避免的。
选择设计点转速为稳态工作点,提取小偏差模型,可获得从燃油流量Wf到转速N1的传递函数

式中:G1(s)为从燃油到转速的传递函数;N1为伺服跟踪回路;Wf为燃油流量。
对此设计PI稳态控制器

则虚框A中的闭环传递函数

从转速到温度的传递函数

G2(s)非正则,但G1closed(s)严格正则,且相对阶次为1,因此二者串联后可获得一正则的传递函数

虽然该传递函数仍然不满足严格正则条件,但将转速传感器和温度传感器的一阶惯性环节动态(时间常数分别取1/50s和1/9s)考虑进来后,即满足严格正则条件。3种不同情况下G3(s)传递函数的根轨迹如图6所示。
从图6中可见,只有在同时考虑转速和温度传感器动态时,如图6(c)中有1个无穷远的零点,这时G3(s)传递函数变为了严格正则。因此在设计限制控制器时,要尽可能考虑到回路中各模块可能的动态部分。
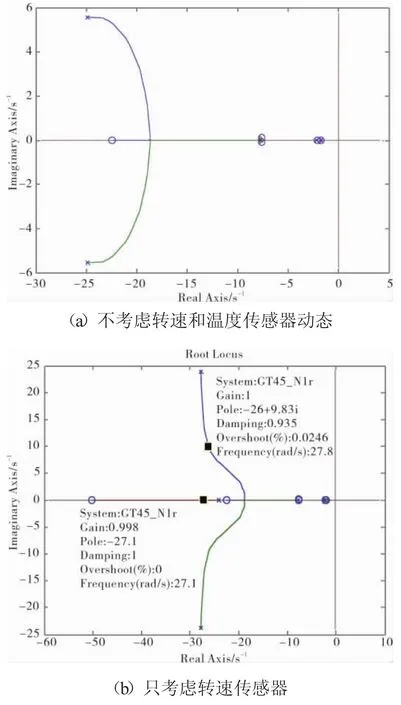

图6 3种情况下的G3(s)根轨迹
采用频域校正法设计限制控制器应考虑如下问题。
图6(c)对应的Bode图如图7所示,其开环系统的稳态增益为-13dB,即0.2239,如果将该传递函数构成闭环回路,则阶跃稳态误差为82%,根本不具备稳态性能指标,因此需要提高稳态增益,即图5中的P(s)的稳态增益应当取1个较大值。此时采用PI控制器结构,系统具有0稳态误差;但PI控制器将面临1个严重问题,可描述如下:

图7 同时考虑转速和温度传感器时G3(s)的幅频特性
设限制保护控制器采用PI结构,当限制保护控制器起作用后,PI控制器积分项会累积偏差起到消除稳态偏差的作用;但当发动机退出极限值后,需要设计外部逻辑对限制保护控制器的积分项的输出清零。若被保护的参数仅稍微降低,此时积分清零后又会导致主控回路的指令因为积分项的清零而增加过大,主控回路按这一增大的指令调节,导致被保护的参数值又超出极限值,限制保护控制器的积分项又开始工作,这样由于限制保护控制器中积分项的清零出现的非线性特性的动作,会出现这种不期望的震荡现象。由于限制保护控制器只对偏差的1个符号方向进行积分,所以它没有自动增加(对于下限值的保护为减小)其积分输出的功能,而积分清零只能实现瞬间消除其积分输出值的功能。
设限制控制器的输出为ΔN1(≤0),由积分项和比例项组成

式中:ΔN1P为比例项输出;ΔN1I为积分项输出。
理想情况是:当ΔN1P=0时,其积分项输出ΔN1I=ΔN1≤0能随原控制回路的指令N1_cmd降低而增加,从而保证被修正后的指令N1_cmd2为1个定值

这一过程直到积分项增加至0后将不再增加,限制保护控制器彻底退出工作,主控回路恢复正常。若想实现该功能,用积分清零是无法做到的,这就需要采取其他措施来解决,比如在图5中后置饱和模块并加入抗积分饱和的方法,但该方法会增加限制控制器设计的复杂度。
为了避免这样的情况出现,可考虑采用频域校正的方法来设计控制器,同时避免限制控制器中出现积分环节。这种做法虽然损失了无偏差跟随性,但只要采用高回路稳态增益的控制器,可以将偏差降到工程上可以接受的范围。例如,给定1%稳态误差指标,可将稳态增益增大约500倍,此时Bode如图8所示。

图8 P=500时,开环系统的Bode
从图中可见,稳态增益达到了40 dB,但此时高频降噪能力明显不足,因此还需要对其进行滞后补偿,同时为了保证幅频特性在穿越0 dB时尽可能平缓以获得较好的动态特性,采用滞后-超前校正可以达到这一设计要求。设计的滞后-超前校正环节如下

式中:P(s)为限制后的温度偏差ΔT45至转速修正量ΔN1的传递函数。
校正后的开环传递函数Bode如图9所示。
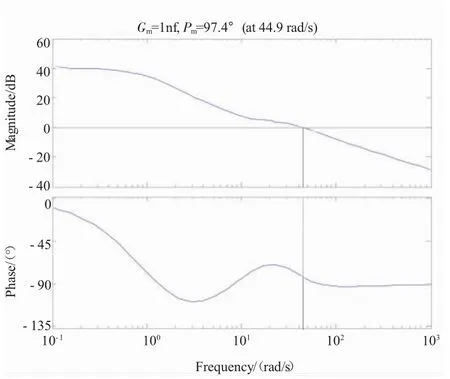
图9 校正后从e2到T45sensor的开环传递函数的bode
3 仿真验证
3.1T45限制保护控制器线性模型验证
验证T45限制保护控制器的simulink如图10所示,其中加入了方差为0.001的高斯白噪声。T45max阶跃输入的阶跃量为1,N1cmd指令作为逐渐增加的干扰输入加在求和点Sum2处,如图11所示,以使系统的输出T45超出T45max,从而验证限制保护控制器的限制效果。

图10 验证T45限制保护控制器的simulink

图11 干扰输入
仿真响应曲线表明,所设计出的控制器能够很好的起到限制保护T45超温的作用,限制效果如图12所示。
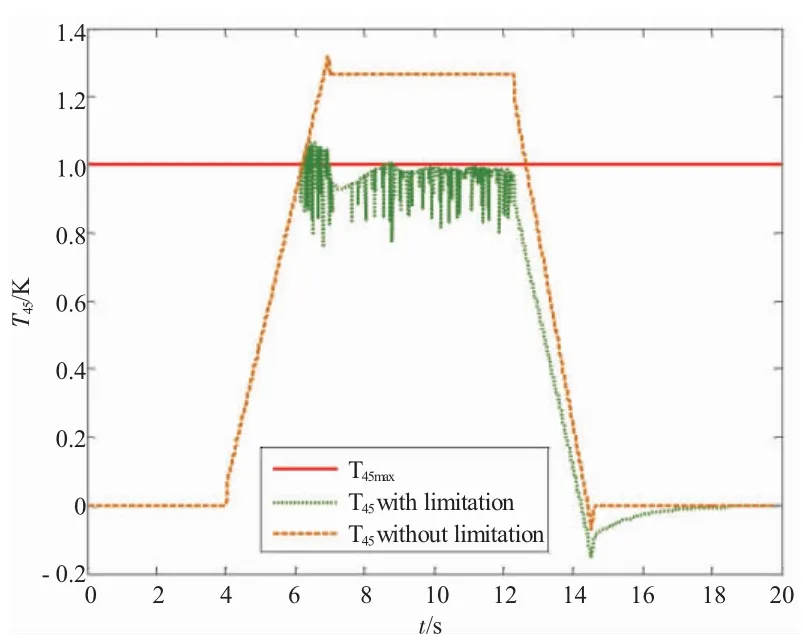
图12 带与不带限制保护时的T45对比
同理,按类似方法设计出Ps3和N2的限制保护控制器,见表1。

表1 各限制保护控制器
3.2T45限制保护控制器非线性模型验证
将T45、Ps3和N2的限制保护控制器与主控回路的推力设定计划综合后得到simulink如图13所示。为了检验限制效果,故意将几个限制值调低。系统输入指令如图14所示。仿真结果如图15所示。从图15中可见,高压转速被限制在10250 r/min,与给定的最大值一致,由于采用领导-跟踪型的决策方式,所以其他参数Ps3和T45并没有超过各自的限制值。从图15(d)中可见,在初始期间,被保护的几个参数都超过了各自的限制值,各限制保护控制器开始起作用,通过低选逻辑选中最低值(这里为负值),将其加在N1cmd1上得到N1cmd2,所以N1cmd2<N1cmd1。仿真时间约13~23s,N2超过了限制值时,N2限制控制器才开始起作用,再次导致N1cmd2<N1cmd1,使低压转速响应跟踪N1cmd2,从而对N2起到了很好的限制保护作用。
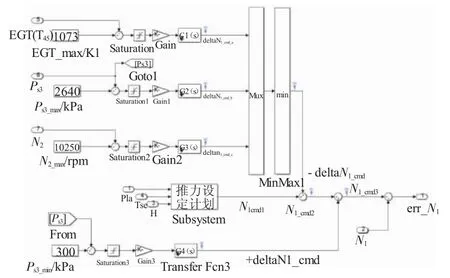
图13 限制保护(顶层管理)simulink
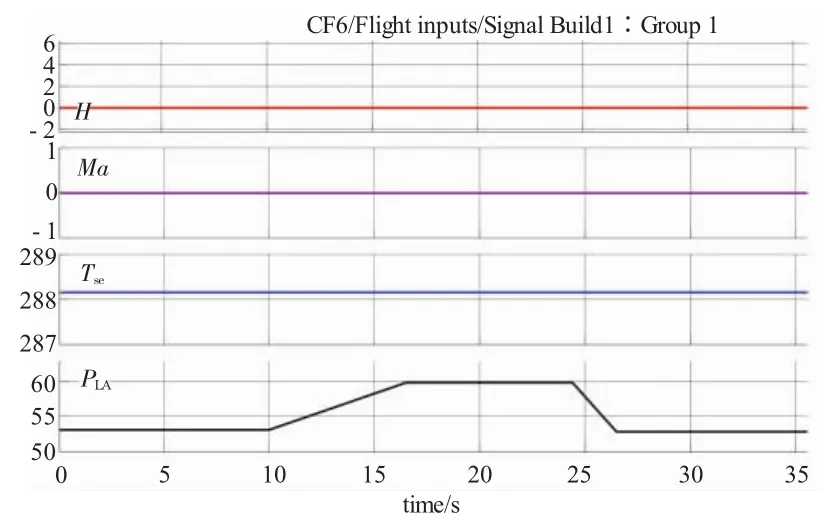
图14 输入指令
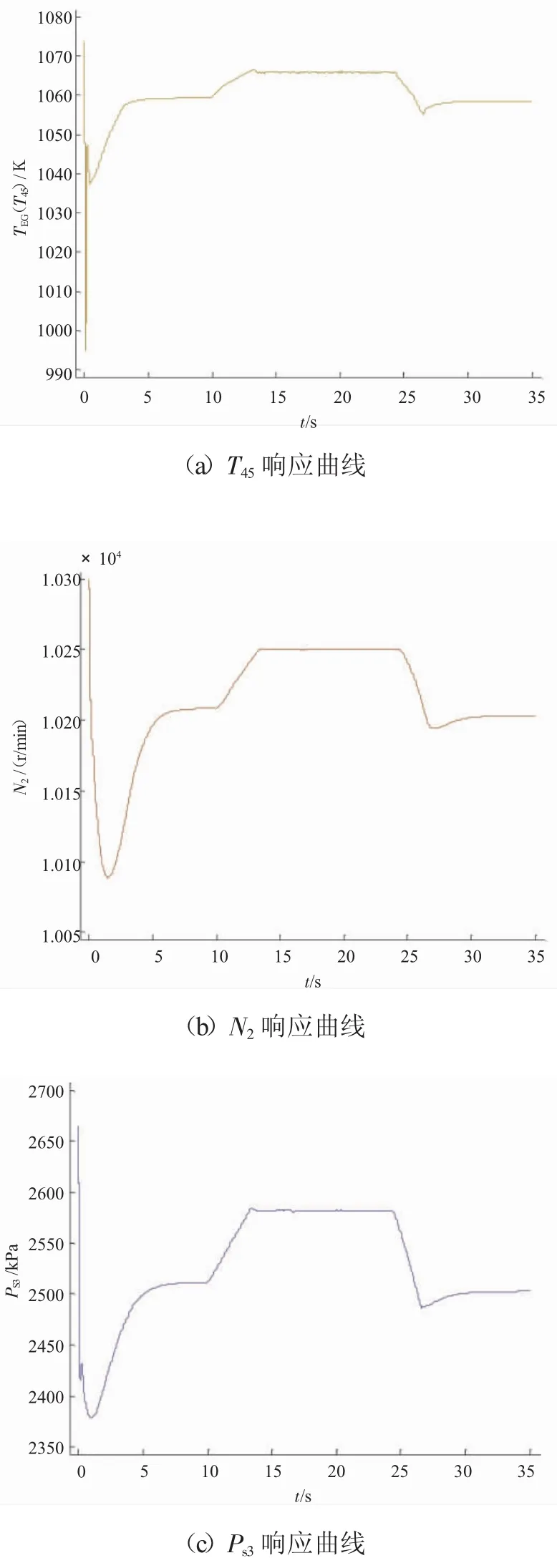
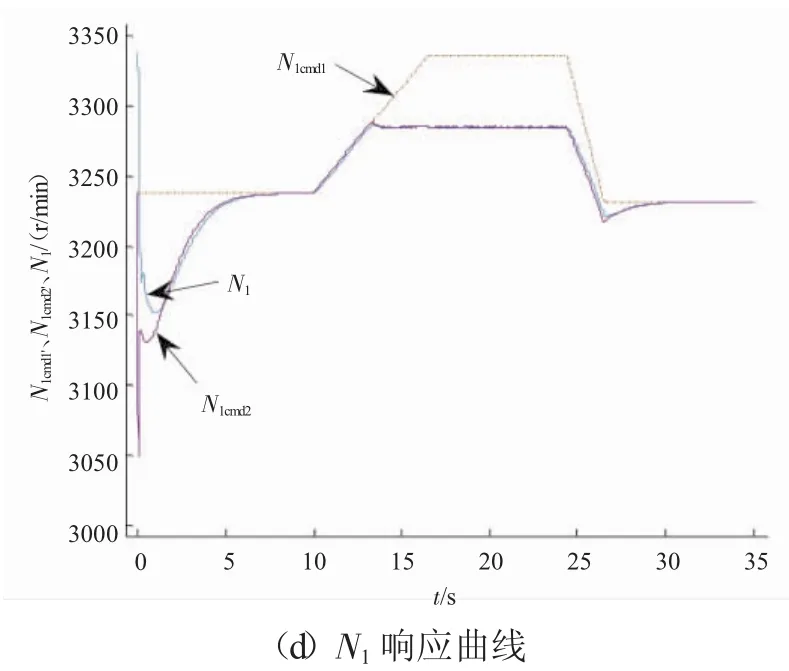
图15 参数限制保护综合验证
4 结论
(1)当涡扇发动机处于限制边界时,针对直接限制结构存在极限环所引起的多个控制器会来回抢夺发动机控制权而导致不同控制通道切换带来的系统震荡问题,提出了1种采用间接限制式的有效控制方法。
(2)以高压涡轮出口总温T45保护回路为例,提出了高回路稳态增益的滞后-超前频域校正法用以设计限制控制器。
(3)通过对发动机线性模型和非线性模型控制系统的仿真验证表明,所设计的限制控制器具有很好的限制保护效果。
[1]Camporeale S M,Fortunato B,Mastrovito M.A modular code for real time dynamic simulation of gas turbines in simulink[J].Engineering for Gas Turbines and Power,2006,128(3):506-517.
[2]Ryan D.M,Jeffrey C.A high-fidelity simulation of a generic commercial aircraft engine and controller[C]//American Institute of Aeronautics and Aeronautics,Inc,46th Joint Propulsion Conference and Exhibit,Nashville,2010:1-16.
[3]Jaw L C,Mattingly J D.Aircraft engine controls:design,system analysis,and health monitoring[M].Alexander:American Institute of Aeronautics and Astronautics,Inc.,2009:119-170.
[4]王曦,党伟,李志鹏,等.1种N-dot过渡态PI控制律的设计方法[J].航空发动机,2015,41(6):1-5. WANG Xi,DANG Wei,LI Zhipeng,et al.A design method of N-dot transient state PI control laws[J].Aeroengine,2015,41(6):1-5.(in Chinese)
[5]张世柽.航空发动机设计手册:第15册控制及燃油系统[M].北京:航空工业出版社,2002:708-747. ZHANG Shicheng.Aero engine design manual in the fifteenth:control and fuel system[M].Beijing:Aviation Industry Press,2002:708-747.(in Chinese)
[6]姚华.航空发动机全权限数字电子控制系统[M].北京:航空工业出版社,2014:177-260. YAO Hua.Full authority digital electronic control system for aeroengine[M].Beijing:Aviation Industry Press,2014:177-260.(in Chinese)
[7]Csank J,May R D,Litt J S,et al.Control design for a generic commercial aircraft engine[R].AIAA-2010-6629.
[8]Spang III A,Brown H.Control of jet engines[J].Control Engineering Practice,1999,7(9):1043-1059.
[9]De Castro J A,Litt J S,Frederick D K.A modular aero-propulsion system simulation of a large commercial aircraft engine[C]//44th AIAA/ASME/SAE and ASEE Joint Propulsion Conference and Exhibit,Hartford,Connecticut,2008:1-17.
[10]Kim J H,Song T W,Kim T S,et al.Model development and simulation of transient behavior of heavy duty gas turbines[J].Engineering for Gas Turbines and Power,2001,123(3):589-594.
[11]Richter H.Advanced control of turbofan engines[M].New York:Springer,2012:118-190.
[12]Bernie M,Roy Ln.Gas turbine propulsion systems[M].John Wiley& Sons,Ltd.,2011:37-88.
[13]Merrill W,Lehtinen B,Zeller J.The role of modern control theory in the design of controls for aircraft turbine engines[J].Journal of Guidance,Control,and Dynamics,1984,7(6):652-661.
[14]Babu V.Aircraft propulsion[M].Bosa Roca:Taylor&Francis Inc,2009:79-168.
[15]Kong Xiangxing,Wang Xi,Tan Daoliang,et al.An extrapolation approach for aeroengine's transient control law design[J].Chinese Journal of Aeronautics,2013,26(5):1106-1113.
(编辑:赵明菁)
Design of Limit Protection Controller with Closed Loop for Turbofan Engine
WANG Xi1,2,LI Zhi-peng3
(1.School of Energy and Power Engineering,Beihang University,Beijing 100083,China;2.Collaborative Innovation Center for Advanced Aero-Engine,Beijing 100083,China;3.AVIC Aeroengine Control System Institude,Wuxi Jiangsu 214063,China)
Modern high-performance turbofan engine adopt the project of multi-variable control segmented and combined to play the aerothermodynamic design potential of engine in the whole flight envelope.To ensure the safety of engine work in the transition state,the limit protection control must be considered in control system design.In order to avoid the system oscillations caused by switching the control mode between different state schedules,a design method for limit protection controller is presented,which contains a phase lag-lead frequency compensator with high loop steady gain.The method can guarantee the limit loop enough steady precision and ability to resist noise,and can avoid the phase margin loosed too much brought by integration element at the same time.By the engine control system simulation of linear model and nonlinear model,the effectiveness of the controller design by described phase margin was verified.
limit protection control;turbofan engine;closed loop;high loop steady gain;phase lag-lead design
V 233.7
Adoi:10.13477/j.cnki.aeroengine.2016.05.001
2016-04-20基金项目:国家重大基础研究项目资助
王曦(1961),男,博士,教授,博士生导师,研究方向为航空动力控制技术;E-mail:xwang@buaa.edu.cn。
引用格式:王曦,李志鹏.涡扇发动机极值限制保护闭环控制设计[J].航空发动机,2016,42(5):1-7.WANGXi,LIZhipeng.Designoflimitprotectioncontroller withclosedloopforturbofanengine[J].Aeroengine,2016,42(5):1-7.
猜你喜欢
农业工程学报(2022年13期)2022-10-09
灌溉排水学报(2022年6期)2022-07-13
新世纪智能(数学备考)(2021年10期)2021-12-21
新世纪智能(数学备考)(2021年10期)2021-12-21
新世纪智能(数学备考)(2020年10期)2021-01-04
水泥工程(2020年4期)2020-12-18
语数外学习·高中版中旬(2020年10期)2020-09-10
航空发动机(2020年3期)2020-07-24
民用飞机设计与研究(2019年4期)2019-05-21
北京航空航天大学学报(2016年12期)2016-02-27
