组合GPS/GLONASS观测数据的三维水汽层析
2016-10-27 08:46董州楠蔡昌盛
大地测量与地球动力学 2016年10期
董州楠 蔡昌盛
1 中南大学地球科学与信息物理学院,长沙市麓山南路932号,410083
组合GPS/GLONASS观测数据的三维水汽层析
董州楠1蔡昌盛1
1中南大学地球科学与信息物理学院,长沙市麓山南路932号,410083
基于香港卫星定位参考站网(SatRef)15个测站共6 d的数据,联合GPS和GLONASS进行对流层三维水汽层析实验。结果表明,相比GPS单系统,GPS/GLONASS组合系统能显著增加信号穿越的网格数量,提高层析水汽分布的精度,平均改善率为36%。
水汽层析;GPS;GLONASS;对流层
国内外学者在三维水汽层析方面已经开展大量研究工作[1-3],但是已有成果大多基于GPS观测数据。多卫星系统组合可以增加可见卫星数,改善卫星的空间几何分布,从而提高层析方法探测水汽的能力。本文基于香港卫星定位参考站网(Hong Kong satellite positioning reference station network,SatRef)的GPS/GLONASS观测数据研究多系统组合对对流层水汽层析结果的影响。
1 地基GNSS水汽层析
1.1斜路径对流层湿延迟估计
对流层为非色散介质,因此对流层延迟不能像电离层延迟那样通过双频观测值的组合进行消除,在精密定位中通常将其作为未知参数同其他参数一并求解。实际参数估计过程中,将每个测站的天顶延迟作为一个未知参数进行估计,再通过投影函数投影到信号路径方向上。对流层延迟模型如下:
(1)

1.2水汽层析原理
通过将GNSS地面网上空的对流层在水平和垂直方向上离散化成格网,并假设每个独立网格内的水汽密度值在一定的时间内为常量,根据斜路径方向上的水汽量(slant water vapor,SWV)等于GNSS信号经过的所有网格水汽含量之和[1],得到层析的观测方程为:
(2)

实际上,由于卫星的几何分布、地面网测站的空间分布及层析时间分辨率的限制,总会有某些网格当中没有信号穿过,导致层析方程病态不适定。可以通过加入水平约束、垂直约束[1]使用奇异值分解(singular value decomposition,SVD)方法[5]求解层析方程。这种非迭代解法虽然对层析初值不敏感,但是层析结果的精度较差。而迭代法虽然要求精度较高的初值,但迭代后结果的精度更高。考虑到迭代法与非迭代法各自的优缺点,本文联合使用非迭代与迭代算法进行层析实验,将SVD分解的结果作为乘法代数重构算法(multiplicative algebraic reconstruction technique,MART)[6]的初值。
2 实验与结果分析
使用香港卫星定位参考站网(SatRef)15个测站2014年年积日152、182、213、244、274、305 d的观测数据。数据采样率30 s,卫星截止高度角设为10°。由于水汽主要分布在近地表10 km以下,因此水汽层析高度设为距地表10 km,每500 m划分为一层。水平网格的划分方案为:纬度范围22.2°~22.6°N,间隔为0.08°,共划分为5个网格;经度范围113.85°~114.36°E,间隔为0.085°,共划分为6个网格。层析时间窗口取值30 min,精密单点定位解算使用的是欧空局(ESA)发布的精密卫星轨道和钟差数据,天顶干延迟模型采用Saastamonien模型,投影函数使用GMF投影函数[7],转换因子Π直接使用GPT2w模型[8]计算。利用探空数据结果来验证GNSS反演结果,其中探空数据使用的是美国怀俄明大学(UW)在线提供的香港京士柏探空站的探空数据,层析垂直约束取实验前3 d探空水汽均值。层析水平格网划分如图1所示。

图1 香港卫星定位参考站网三维层析水平格网划分示意图Fig.1 The division of horizontal voxels of SatRef for water vapor tomography
使用中南大学开发的精密单点定位处理软件[9]MIPS-PPP解算天顶对流层延迟(zenith total delay,ZTD)。为验证MIPS-PPP软件估计ZTD的可靠性,使用MIPS-PPP软件求解各天BJFS站的天顶对流层延迟参数,并与IGS分析中心提供的对流层产品进行比较。实验设定位置解的三维坐标均收敛到10 cm以内时认为坐标解已收敛,并开始统计ZTD。MIPS-PPP和IGS的ZTD产品之间的偏差均值及标准偏离(STD)见表1。由表1可知,MIPS-PPP软件解算的ZTD产品与IGS分析中心产品的平均偏差在2 cm左右,偏差的STD小于1 cm,满足层析实验要求。
限于篇幅,图2只给出了2014年年积日152 d(GPS时06:00~19:00)GPS系统和GPS/GLONASS组合系统在层析窗口30 min内穿过格网的合格信号总数和对应层析时间窗口有信号穿越的网格总数。实验中,部分GLONASS卫星信号不理想,在数据处理时剔除。可以看出,在组合系统下,相同的层析时间窗口观测获得的信号数量明显增多。在GPS单系统和GPS/GLONASS组合系统下有信号穿越的网格数量明显增加,特别是在某些时段,如图2(b)中13:30~14:00有信号穿越的网格数量由459个增加到508个,信号穿过更多的网格可以增加这些网格层析结果的精度和可靠性。
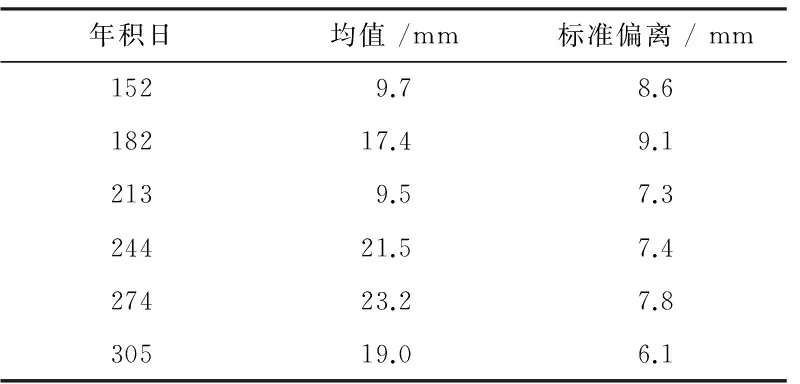
表1 MIPS-PPP软件解算ZTD与IGS ZTD产品的
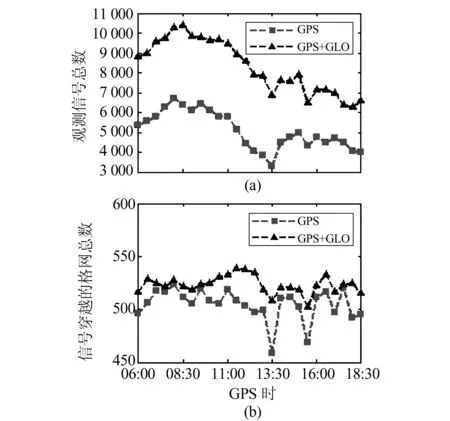
图2 2014年年积日152 d(GPS时06:00~19:00)层析窗口合格信号总数和有信号穿越网格数量Fig.2 Number of qualified rays and voxels crossed by rays on June 1, 2014(GPST 06:00-19:00)
图3给出了2014年年积日152、182、213、244、274、305 d GPS时12:00~12:30 GPS单系统层析廓线、GPS/GLONASS组合系统层析廓线和探空廓线的对比。可以看出,三者变化趋势较为一致。但相比于GPS单系统,组合系统大多数情况下在探空站附近内插的廓线与探空廓线符合得更好,如图3(c)在高程7 km位置处,GPS单系统结果与探空数据结果存在较大偏差,但组合系统在此处与探空数据符合较好,说明组合系统结果更加稳定可靠。在低高度处GNSS层析解较探空数据的偏差较大,其原因在于探空数据的时间分辨率低、GNSS反演水汽的精度限制以及水汽密度值在低高度处变化较大。
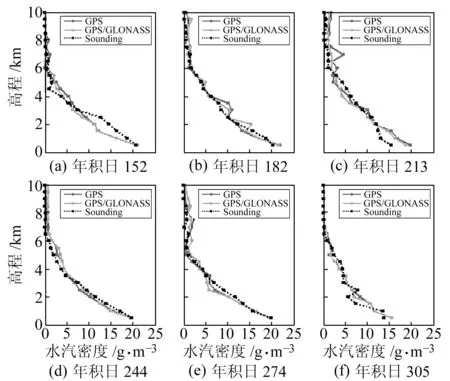
图3 GPS单系统和GPS/GLONASS组合系统层析廓线和探空廓线的对比Fig.3 Water vapor density profile derived from GPS, combined system and radiosonde
为评价组合系统对于层析水汽三维分布整体精度的影响,层析计算中首先去掉HKSC站的观测数据,将该站数据处理获得的斜路径水汽含量(SWV)作为参考值进行层析解的检核。利用HKSC站观测的信号在各个网格中的截距,运用式(3)求解SWV,并与参考值SWV比较。表2统计了GPS单系统和GPS/GLONASS组合系统层析解计算的SWV与参考值偏差的标准偏离值。可以看出,除年积日244 d外,组合系统偏差的STD值较GPS单系统均有明显减小,平均改善率为36%。

表2 层析时段天气状况及层析结果与PPP
图4给出了2014年年积日152 d GPS时12:00~12:30 GPS单系统和组合系统层析获得的三维水汽分布图。由于水汽密度随着高度的增加而减小,且在高层区域分布比较均匀,因此图中只给出了5 km以下的水汽分布。可以看出,在近地表3 km以下水汽密度变化较大,GPS单系统和组合系统的层析水汽分布结果在高程方向上均能反映出水汽随高度的递减变化,而在2 km处GPS单系统和组合系统层析获得的水汽分布存在较大偏差。从前面的分析可知,GPS/GLONASS组合系统具有更好的精度与可靠性,由此可以判断图4(b)更能反映水汽的实际分布状况。

图4 2014年年积日152 d GPS时12:00~12:30GPS单系统和组合系统层析三维水汽分布Fig.4 Comparison between GPS-only and integratedGPS/GLONASS 3-D tomographic water vapor distribution on June 1, 2014(GPST 12:00-12:30)
3 结 语
多GNSS系统组合会明显增加层析信号的数量,改善信号在层析区域的空间几何分布。本文基于香港卫星定位参考站网15个测站2014年共6 d的GNSS观测数据进行对流层三维水汽层析实验。结果表明,较GPS单系统,GPS/GLONASS组合系统层析窗口中合格信号数量和有信号穿越的网格数量均有明显增加;通过探空数据的检验,层析结果与探空结果符合较好,但组合系统的结果更加稳定、可靠;GPS单系统和组合系统的层析水汽分布结果在高程方向上均能反映出水汽随高度的递减变化,组合系统可以明显提高层析水汽整体的分布精度,平均改善率为36%。
[1]Flores A,Ruffini G,Rius A.4D Tropospheric Tomography Using GPS Slant Wet Delays[J]. Annales Geophysicae, 2000, 18(2): 223-234
[2]宋淑丽. 地基GPS网对水汽三维分布的监测及其在气象学中的应用[D]. 上海:中国科学院上海天文台, 2004(Song Shuli. Sensing Three Dimensional Water Vapor Structure with Ground based GPS Network and the Application in Meteorology [D]. Shanghai: Shanghai Astronomical Observatory, CAS, 2004)
[3]毕研盟,杨光林,聂晶.基于Kalman滤波的GPS水汽层析方法及其应用[J]. 高原气象,2011,30(1):109-114(Bi Yanmeng,Yang Guanglin,Nie Jing. Method of GPS Water Vapor Tomography Based on Kalman Filter and Its Application[J]. Plateau Meteorology, 2011,30(1): 109-114)
[4]蔡昌盛,夏朋飞,史俊波,等.利用GPS/GLONASS组合精密单点定位方法估计天顶对流层延迟[J]. 大地测量与地球动力学,2013(2):54-57(Cai Changsheng,Xia Pengfei,Shi Junbo,et al. Estimation of Zenith Tropospheric Delay Using Combined GPS/GLONASS PPP Method[J]. Journal of Geodesy and Geodynamics, 2013(2):54-57)[5]Rohm W, Bosy J.The Verification of GNSS Tropospheric Tomography Model in a Mountainous Area[J]. Advances in Space Research, 2011, 47(10): 1 721-1 730
[6]何林,柳林涛,苏晓庆,等. 水汽层析代数重构算法[J]. 测绘学报,2015,44(1):32-38(He Lin,Liu Lintao,Su Xiaoqing, et al.Algebraic Reconstruction Algorithm of Vapor Tomography[J]. Acta Geodaetica et Cartographica Sinica, 2015, 44(1): 32-38)
[7]Böhm J, Niell A, Tregoning P, et al. Global Mapping Function (GMF): A New Empirical Mapping Function Based on Numerical Weather Model Data[J]. Geophysical Research Letters, 2006, 33(7)
[8]Böhm J, Möller G, Schindelegger M, et al. Development of an Improved Empirical Model for Slant Delays in the Troposphere (GPT2w)[J]. GPS Solutions, 2015, 19(3): 433-441
[9]Cai C, Gao Y, Pan L, et al. Precise Point Positioning with Quad-Constellations:GPS, Beidou,GLONASS and Galileo[J].Advances in Space Research, 2015, 56(1):133-143
About the first author:DONG Zhounan, postgraduate, majors in date processing of GNSS and modeling of water vapor tomography, E-mail:ZNDongCSU@163.com.
Analysis of Three-Dimensional Water Vapor Tomography Using Integrated GPS/GLONASS Observations
DONGZhounan1CAIChangsheng1
1School of Geoscience and Info-Physics, Central South University, 932 South-Lushan Road, Changsha 410083,China
Based on data collected for six days at fifteen stations of Hong Kong satellite positioning
tation network (SatRef) in 2014, we combine GPS and GLONASS to perform a three-dimensional water vapor tomography experiment. The results show that the integrated GPS/GLONASS system can significantly increase the number of voxels which are passed through by the signals. The system improves the accuracy of distribution of water vapor by an average improvement rate of 36% in comparison with a GPS-only system.
water vapor tomography; GPS; GLONASS; troposphere
Scientific Research Fund of Hunan Provincial Education Department,No. 13K007;Hunan Provincial Innovation Platform and Talents Program,No. 2015RS4007.
2015-09-29
董州楠,硕士生,主要研究方向为GNSS数据处理与对流层层析建模,E-mail:ZNDongCSU@163.com。
10.14075/j.jgg.2016.10.010
1671-5942(2016)010-0889-03
P228
A
项目来源:湖南省教育厅科研项目(13K007);湖南省创新平台与人才计划(2015RS4007)。
猜你喜欢
云南师范大学学报(自然科学版)(2022年2期)2022-03-29
土壤学报(2022年1期)2022-03-08
成都信息工程大学学报(2021年3期)2021-11-22
区域治理(2021年14期)2021-08-11
中国海上油气(2020年5期)2020-10-20
中国农业文摘·农业工程(2020年4期)2020-07-24
中国农业文摘-农业工程(2020年4期)2020-07-17
军民两用技术与产品(2019年7期)2019-07-26
载人航天(2016年4期)2016-12-01
高原山地气象研究(2016年1期)2016-11-10