飞机维修机械组件拆装过程训练评估模型研究
2016-10-28 03:14何汉清
计算机测量与控制 2016年7期
任 毅,臧 林,耿 宏,何汉清
(1.东方航空技术有限公司培训部,上海 200020; 2.中国民航大学 航空自动化学院, 天津 300300;3.深圳航空有限公司维修工程部, 深圳 518128)
飞机维修机械组件拆装过程训练评估模型研究
任 毅1,臧 林2,耿 宏2,何汉清3
(1.东方航空技术有限公司培训部,上海 200020; 2.中国民航大学 航空自动化学院, 天津 300300;3.深圳航空有限公司维修工程部, 深圳 518128)
为了提高飞机维修培训的训练效果及培训效率,解决目前飞机维修培训中机械组件拆装流程复杂,缺少人机交互,导致培训效果不理想、效率低的问题;根据实际任务描述中机械组件拆卸过程各个步骤明确其状态变化和约束条件,采用Grafcet工具建立拆装过程模型;针对事先规定的拆卸各步骤中的权重,建立拆装过程训练评估模型,结合训练实际操作情况,定量地给出一次任务中评价结果;模型能够支持学习、训练、考核等多种模式的训练方式;最后,在维修培训平台中以飞机加油活门拆装过程为例,验证模型的有效性和实用性,并且能够完成信息交互和结果评估。
飞机维修仿真;机械组件;逻辑控制器图形表示工具;拆装过程模型;评估模型
0 引言
目前, 在飞机维修中包含种类繁多的飞机机械组件,机械组件拆卸是维修过程中一项重要的作业[1]。虚拟维修训练是虚拟现实技术的重要应用之一,由于其具有安全、经济、摆脱训练场地和环境限制条件等众多优点而被越来越多地采用,虚拟拆装是虚拟维修过程中的核心环节[2-4]。对于机械组件虚拟拆装是民航飞机维修培训中的一个重要环节,其成本低廉,避免了实际资源的消耗[5],对民航维修人员熟悉工作,提高维修效率具有重要意义。
目前,对机械组件拆装研究主要集中在拆装次序和拆装关系的建模[6],其实质是将组件作为一个质点的虚拟拆装。尚洁、徐兴华介绍了对虚拟拆装过程进行建模的分析,分别采用PERT 图和有色Perit网建立拆装过程模型[7-8],但模型中缺少工具约束,与真实操作中的要求不相符。张忠华运用 IDEF3 和DSM相结合的方法建立零部件的统一性表达,并对飞机各个组件进行规划,实现拆卸目标组件的有序逻辑表述[9],黄涛利用 Project 软件对装备的维修拆装过程建立了基于层次关系和关联关系的拆装结构模型拆装资源模型以及拆装运动模型[10],前两者关注于拆装顺序,但是没有考虑整个拆装过程的评估考核。
针对目前机械组件拆装过程模型中的不全面,采用Grafcet描述拆装过程的建模,在过程模型中添加人机交互元素,并建立过程评估模型,使受训人员清晰地了解在拆装过程中的不足之处,提高培训的效果和效率。
1 机械组件的拆装过程建模
1.1 飞机机械组件拆装过程原理
在飞机维修中,根据A320飞机维修手册AMM(Aircraft Maintenance Manual),机械组件的拆装过程基本原理为操作人员在满足拆卸前提条件下,结合组件的当前状态运用正确的维修工具和维修动作作用于机械组件的可拆卸的部件,最终实现组件拆卸。如图1所示。

图1 机械组件拆装基本原理
飞机组件的拆卸一般分为 3 大部分:检查飞机满足维护构型、接近程序和拆卸操作过程。其中,接近程序包括警告措施、拔开相应跳开关、接近工作等准备工作。拆卸操作过程可用到的维修工具包括平台工具、操作工具(扳手、改锥、螺丝刀)、清洁工具、维修设备等。维修动作包括拆卸、安装、清洗、擦拭。
拆装过程还需满足流程和约束条件。流程条件指当前拆卸操作实现需要其前边的一个或多个状态已经满足,才可以进行当前操作步骤。约束条件指当前操作所需要的工具、设备所构成的条件。
1.2 拆装过程建模
Grafcet(逻辑控制器图形表示工具)是并发同步系统建模工具,它以 Petri 网理论为理论基础,采用图形表示,可以用较少数量的步和变迁描述过程,且有很强的逻辑描述和分析能力[11-13]。
Grafcet基本元素包括以下3种。
(1)步(Steps)。分为起始步和普通步。表示机械组件拆卸过程中,当前组件所处状态。动作与步相联系,是 Grafcet 的输出,表示拆卸过程中需要采用的拆卸动作。当机械组件处于某个编号的状态时,如果有与此步相关联的动作,就会执行该动作。
(2)变迁(Translation)。表示拆装过程中的工具限制条件。
(3)有向连接/弧(Directed links)。表示拆装过程的顺序。
常见的几种构型如图2所示。

图2 常见构型图
(1)顺序:表示当前拆卸状态完成即可进入下一个状态。
(2)And分支:表示当前拆卸状态完成可以同时进入下几个状态。
(3)And交汇:表示当前几个拆卸状态必须都完成才可进入下一个状态。
(4)Or分支:表示当前状态完成可以进入以下几个状态中的其中一个。
(5)Or交汇:表示当前几个状态有其中一个完成即可进入下一个状态。
根据Grafect几种构型,结合AMM手册中TASK 28-25-51-000-001分析加油活门拆装过程,建立拆装过程模型如图3所示,拆装过程分为13步,每一步代表拆装过程中的一个状态。其中1、2、3步代表处于前期准备状态其动作指出准备工作的具体内容。从第4步开始进入机械组件拆装过程,其中,变迁代表拆装过程中的工具约束条件,每一步的动作代表组件拆装过程中需要对操作对象执行的动作,有向连接从顶到底的顺序代表了拆卸加油活门顺序。其中第2、3和4步是And 交汇关系,4步中断开电接头操作可以执行的条件是2和3两步的准备工作都全部完成。5步和6、7、8、9步是关系And 分支关系,5步中的3个拆卸动作完成之后,并取到扭力扳手工具之后,6、7、8、9步中拆卸螺帽和垫片的动作才可以执行。6、7、8、9和10步的关系是And 交汇关系,6、7、8、9步中的动作全部执行完成之后,并满足工具条件才可以执行10步将阀体松出动作。
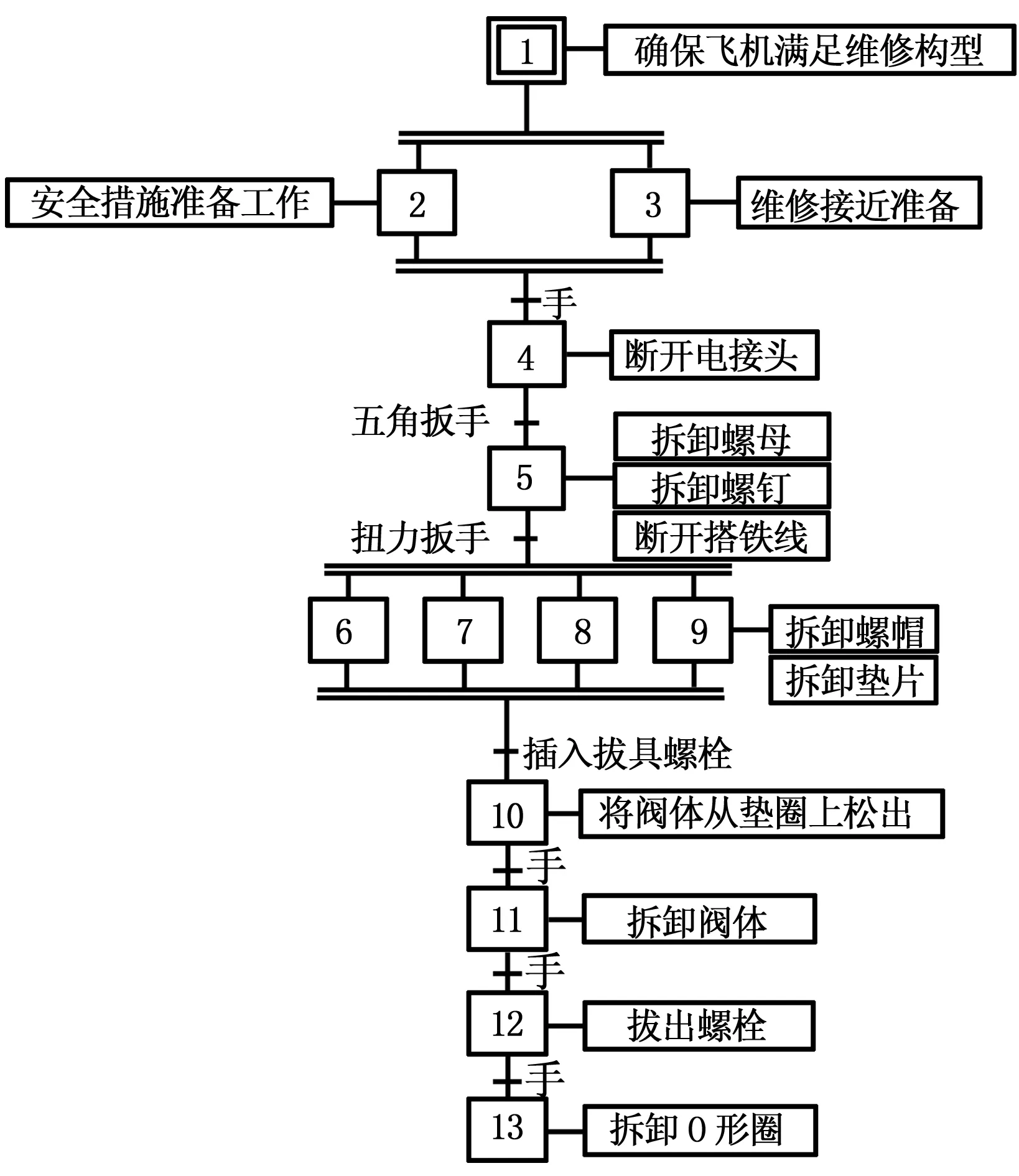
图3 加油活门拆装过程的Grafcet模型
1.3 机械组件拆卸过程评估模型
评估模型如图4所示,其中变量含义如表1所示。可给出操作错误时的必要提醒,并根据错误次数扣除相应分数,最终给出本次任务的总体得分,使受训人员了解在该任务中的薄弱环节,并通过训练掌握拆装任务的关键技术。
模型描述如下:
(1)状态信息。当选择了AMM中某项任务训练时,系统会读取当前拆卸操作步骤的信息包括当前带拆卸组件的状态以及需要工具等约束条件,并载入当前任务中每一步骤的权重。
(2)拆装约束条件判断及交互过程。当受训人员进行拆卸任务时,系统会记录当前的组件状态、操作工具和操作对象,同时与标准的拆卸过程中3个对象做比较。如果受训人员当前操作的组件状态S、操作对象O、操作工具T与标准拆卸过程中的Sn、On、Tn一致,该步拆卸过程满足,组件进入下一步拆卸状态Sn + 1,并且改变标准操作的工具和操作对象为与下一个状态相对应的On + 1、Tn + 1。如果存在拆卸信息中的3个量与正确拆卸过程不一致的现象,第一次操作不一致出现时,系统立即显示操作错误的警示信息,提示操作者需要改变操作方式。当第二次操作仍然与标准的拆卸流程不一致,会显示正确的操作帮助,依据当前组件的状态,指明正确的拆卸工具和操作对象,受训人员可依据提示进行进一步操作。当连续错误操作三次后,直接选用正常的工具完成该步的动作进入下一状态,能够保证整个拆卸过程可继续进行。
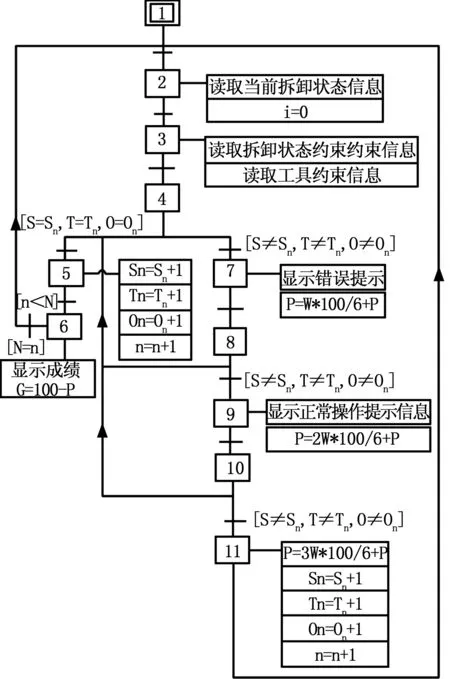
图4 机械组件拆卸过程评估模型
变量名称含义S当前操作动作机械组件所处的状态T当前状态所使用的工具O当前操作的操作对象Sn当前步骤所对应的标准流程中机械组件的状态Sn+1当前步骤下一步标准流程中机械组件的状态On+1当前步骤的下一步标准流程中的操作对象Tn+1当前操作的下一步标准流程中需用的工具P当操作错误时需要扣掉的分数G拆卸任务完成后的总体分数N该拆装任务操作的总步数n当前操作所在的步数
2 仿真实例
基于上述Grafcet过程模型和评估模型,应用于3D虚拟设备维修平台上[14],对A320飞机的加油活门的拆装操作过程进行仿真分析、结果评估。
Grafcet拆装过程模型如图3所示,拆装过程分为三部分,第一部分为飞机维护构型;第二部分为接近程序;第三部分为拆卸过程。
3D渲染场景在拆装进行前加载完成,2步动作描述为完成安全准备工作,放置安全护栏、警告牌,分别在49VU、121VU拔开相应跳开关。3步动作描述为选取4 M工作平台,接近右大翼,打开622JB盖板。4步动作描述为断开加油活门的电接头。5步表述为拆卸螺母、拆卸螺钉、断开搭铁线,其约束条件为工具五角扳手。6、7、8、9步动作描述为拆卸螺帽、拆卸垫片,其约束条件为工具扭力扳手。10步动作描述为将阀体从垫圈上松出,其约束条件为工具螺栓。11、12、13步的动作描述分别为拆卸阀体、拔出螺栓、拆卸O形环。如图5所示为拆卸过程效果图。
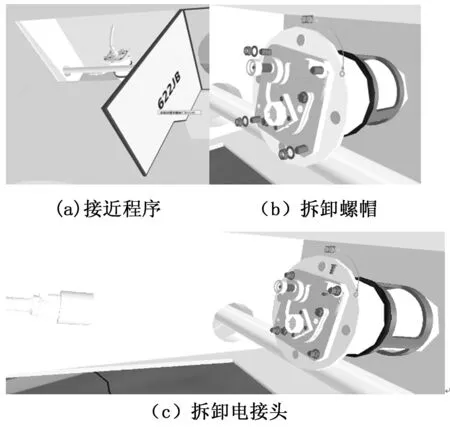
图5 加油活门拆卸过程效果图
以拆卸过程中图3所示的第6、7、8、9步工具限制条件操作错误为例进行过程评估。当受训人员采用了错误的工具,会有人机交互提示出现。第一次操作错误,工具错误提示会出现几秒,提醒受训人员更换工具,如图所示6(a)。并且当检测到工具不是标准的扭力扳手后,依据该步骤的权重为Wi=0.3,依据评估模型,需要扣除的分数为P=Wi×100/6=5;如果第二次受训人员所用工具仍不正确,则会给出较为详细的提示如图所示6(b),指明正确工具和操作对象,此时,P=2×Wi×
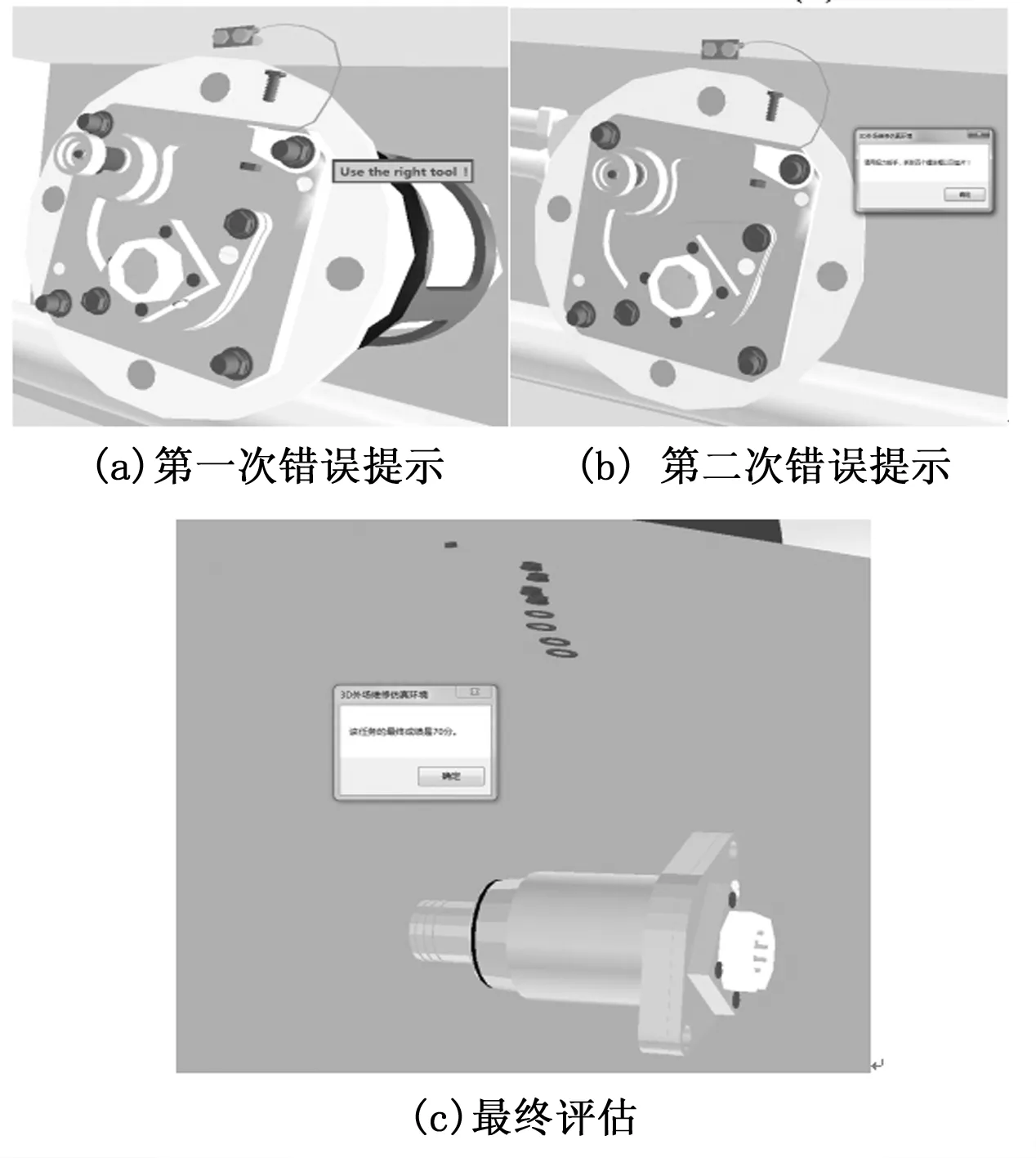
图6 操作错误提示及最终成绩评估效果图
100/6+P=15;如果第三次操作仍错误,则会替受训人员完成该步操作,直接进入到下一个状态,此时,P=3×Wi×100/6+P=30;当所有拆卸流程完成之后,加油活门拆下放在工作平台。该实例其他操作步骤都正确,根据之前的操作错误次数,扣除相应的分数P,最后给出受训人员在此次任务中所得分数G=100-P=100-30=70,如图6(c)所示。
3 结束语
将机械组件的拆装过程采用Grafcet建立过程模型和评估模型,能够描述机械组件的拆装流程,给出拆装作业的结果评估。有效的满足飞机维修训练功能,其交互元素可提高受训人员的训练效率,改善训练效果。当受训人员掌握了关键技术之后,如何实现依据历史培训的信息动态改变拆卸步骤的权重将是接下来工作的重点
[1] 马立元, 董 博, 刘鹏远. 基于同步网的虚拟拆卸过程建方法研究[J]. 系统仿真学报, 2012, 24(3):541-545.
[2] 张王卫, 苏群星, 刘鹏远. 虚拟维修拆卸序列规划方法研究[J]. 计算机仿真, 2013, 30(6):115-120.
[3] 国海峰, 刘泽乾, 陈丹强. 机载武器系统模拟训练仿真平台设计[J]. 计算机测量与控制, 2010, 18(5):1103-1105.
[4] 贾晨星, 朱元昌, 邸彦强. 装备虚拟操作训练的过程建模方法研究[J]. 计算机测量与控制, 2011, 19(12):3102-3104.
[5] 耿 宏, 吴启龙. 面向虚拟维修任务拆装过程的建模方法研究[J]. 制造业自动化, 2015, 5(9):35-38.
[6] 刘家学, 刘 涛, 耿 宏. 基于 Petri 网和语义网络的虚拟维修过程建模与应用[J]. 图学学报, 2013, 34(2): 113-118.
[7] 尚 洁, 容晓峰, 徐兴华. 基于PERT图的虚拟拆装过程建模[J]. 计算机与数字工程, 2011, 39(3):151-154.
[8] Wu D X, Xu X H, Shang J. Modeling of Virtual Assembly and Disassembly Process Using Colored Petri Nets Mechanical Engineering and Technology[M]. Springer Berlin Heidelberg, 2012:603-609.
[9] 张忠华,耿 宏. IDEF3和DSM在拆装过程建模中的应用[J]. 中国民航大学学报, 2015, 3(3):32-35.
[10] 黄 涛, 张豫南, 李瀚飞,等. 基于Project的虚拟维修拆装过程建模[J]. 系统仿真学报, 2012(1):192-196.
[11] Carré-Ménétriér V, Zaytoon J. Grafcet: Behavioural Issues and Control Synthesis[J]. European Journal of Control, 2002, 8(4):375-401.
[12] 王寿光, 林善法, 张有兵. 基于Grafcet的电梯控制系统建模[J]. 系统仿真学报,2007, 19 (A1):263-265.
[13] Philippot A, Tajer A. From GRAFCET to Equivalent Graph for synthesis control of discrete events systems[A]. Control & Automation (MED), 2010 18th Mediterranean Conference on[C]. IEEE, 2010:683-688.
[14] 陈静杰, 李会茹, 曾学锋. 层次化UML状态机在拆装过程仿真中的应用[J]. 图学学报, 2014, 3(3):481-485.
Research on Machinery Components Disassembling Process Training Evaluation Model in the Aircraft Maintenance
Ren Yi1,Zang Lin2,Geng Hong2,He Hanqing3
(1.China Eastern Aviation Technology Co.Ltd.Training Department, Shanghai 201202, China;2.Aeronautical Automation College, Civil Aviation University of China, Tianjin 300300, China;3.Maintenance Engineering Dept of Shenzhen Airlines Co,Ltd,Shenzhen 518128,China)
In order to improve the effect and efficiency of the aircraft maintenance training, and solve the problem that mechanical components disassembling process are complex and lack of interacting between person in the aircraft maintenance training,which cause the bad training effect and low efficiency. According to the components status, migration and the constraint conditions in the steps of the mechanical components disassembling process in the task, the disassembling process model are established by using the Grafcet. The training evaluation model is set up according to the weights in the steps. The result of the training is evaluated in quantity on the basis of the training operation situation .The model can support learning, training, evaluation pattern of training. Finally, the disassembly and evaluation process of the refuel valve on the maintenance training platform is taken as an example to verify that the model effective and practical and complete the interactive information presentation and the results evaluation
aircraft maintenance simulation; mechanical component; Grafcet; disassembling process model ;evaluation model
2016-01-01;
2016-02-24。
国家自然科学基金重点项目(60832011);天津市科技攻关计划重点项目( 06YFGZGX00700)。
任 毅(1973-),男,上海人,工程师,主要从事航空机务智能维修方向的研究。
耿 宏(1964-),男,陕西人,教授,硕士研究生导师,主要从事民航数据分析和飞机维修工程方向的研究。
1671-4598(2016)07-0298-03
10.16526/j.cnki.11-4762/tp.2016.07.080
TP391.9 文献标识码:A
猜你喜欢
能源工程(2022年2期)2022-05-23
中学生数理化(高中版.高考理化)(2020年11期)2020-12-14
小太阳画报(2020年11期)2020-12-10
小太阳画报(2020年10期)2020-10-30
重型机械(2020年2期)2020-07-24
装备制造技术(2019年12期)2019-12-25
红领巾·成长(2018年10期)2018-11-19
电子制作(2018年17期)2018-09-28
通信电源技术(2018年5期)2018-08-23
读者(2017年18期)2017-08-29