基于电磁耦合补偿反馈抑制的无刷直流电机控制仿真
2016-11-02 06:43殷若鹏尤冬石刘亚龙
智能计算机与应用 2016年3期
殷若鹏,尤冬石,刘亚龙
(1中国石油西气东输管道公司郑州管理处,郑州 450008;2中国石油西气东输管道公司浙江管理处,杭州 310008;3中国石油西气东输管道公司山西管理处,太原 030001)
基于电磁耦合补偿反馈抑制的无刷直流电机控制仿真
殷若鹏1,尤冬石2,刘亚龙3
(1中国石油西气东输管道公司郑州管理处,郑州450008;2中国石油西气东输管道公司浙江管理处,杭州310008;3中国石油西气东输管道公司山西管理处,太原030001)
永磁无刷直流电机的电气自动化控制是保障电机可靠工作的关键,无刷直流电机受到电磁耦合器时隙扰动导致控制指向性不好,电流输出失稳。提出一种基于电磁耦合补偿反馈跟踪抑制的无刷直流电机控制技术,首先进行了永磁无刷直流电机的等效电路模型设计,分析了无刷直流电机的感应电能传输原理,进行电机控制算法改进设计,分析控制约束参量模型并进行了控制目标函数构建。采用电磁耦合补偿反馈跟踪技术实现电磁耦合器时隙扰动误差补偿,提高电机输出的稳定性。仿真结果表明,该电机自动化控制模型具有较好的输出增益,对输出的电流、电压、功率等参量的调制性能较好。
电磁耦合;电气自动化控制;无刷直流电机
0 引 言
永磁直流电机按照有无电刷可分为永磁无刷直流电机和永磁有刷直流电机。永磁无刷直流电机根据电磁耦合器的电磁场感应特性,结合磁损耗抑制进行交流发电,永磁无刷直流电动机是由一块或多块永磁体建立磁场的直流电动机,具有体积小、效率高、结构简单、用铜量少等优点,广泛运用在各种大型和小型的电气设备中,比如船舶、航空、机械等行业都具有广泛的应用。永磁无刷直流电机的电气自动化控制是保障电机可靠工作的关键,无刷直流电机受到电磁耦合器时隙扰动导致控制指向性不好,电流输出失稳,需要进行电机的优化控制,研究永磁无刷直流电机的电磁耦合控制算法具有重要意义。
当前,对永磁无刷直流电机的控制方法主要有基于模糊神经网络的控制方法、基于模糊PID控制的电机控制方法、基于小波分析的电机控制方法等[1-3],上述方法通过构建永磁无刷直流电机的电压、电流等约束参量模型,通过控制目标函数研究实现电机优化控制,取得了一定的成果,其中,文献[4]提出一种基于电压增益自适应线性反馈补偿的永磁无刷直流电机的耦合控制算法,以功率损耗与效率为约束参量模型实现优化控制,结合粒子群算法进行控制优化,提高了输出增益,但是该算法计算开销较大,实现困难。文献[5]提出一种基于驱动器功率因子自适应加权的永磁无刷直流电机的控制方法,采用蚁群觅食的仿生技术,进行控制算法改进,采用共振激励控制,提高了电机的输出功率增益,但该控制方法的收敛性不好,容易受到不确定因素的扰动较大,需要进行控制算法的改进[6-8]。针对上述问题,本文提出一种基于电磁耦合补偿反馈跟踪抑制的无刷直流电机控制技术,首先进行了永磁无刷直流电机的等效电路模型设计,分析了无刷直流电机的感应电能传输原理,进行电机控制算法改进设计,分析控制约束参量模型并进行了控制目标函数构建。采用电磁耦合补偿反馈跟踪技术实现电磁耦合器时隙扰动误差补偿,提高电机输出的稳定性。最后通过仿真实验进行了性能测试和分析,得出有效性结论。
1 永磁无刷直流电机的输出模型等效电路分析和被控对象描述
1.1永磁无刷直流电机的输出模型等效电路分析
为了实现对永磁无刷直流电机的优化控制,降低输出误差,提高电机的输出功率增益,需要进行永磁无刷直流电机的原理分析和等效电路设计,以实现电能的高效传输。永磁无刷直流电机的线圈序列采用磁共振模式,将接收的电能经过共振线圈实现感应电能的传输,得到永磁无刷直流电机的电能传输原理图如图1所示,图中永磁无刷直流电机的次级共振环节带有“SS”补偿功能,采用“T”型等效构建永磁无刷直流电机的电能传输系统拓扑结构如图2所示。
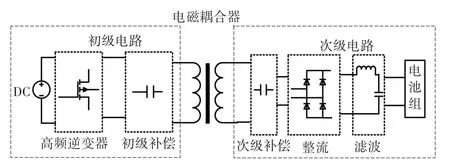
图1 永磁无刷直流电机的电能传输原理Fig.1 Electric energy transmission principle of permanent magnet brushless DC motor
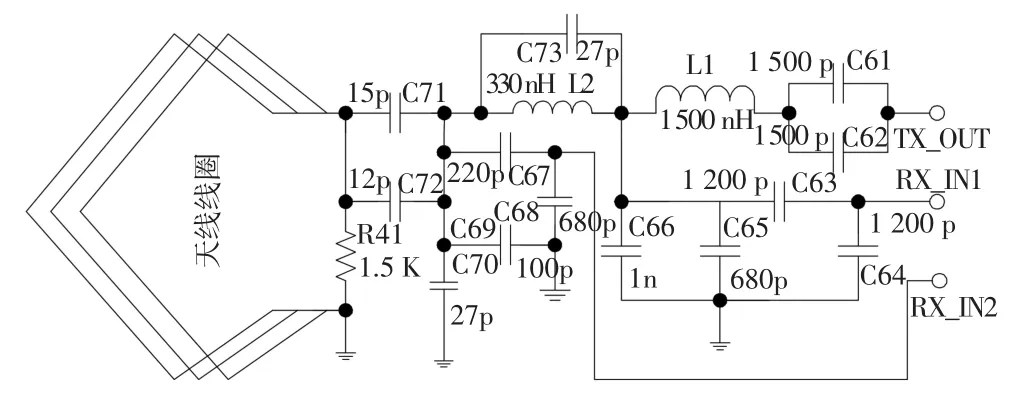
图2 永磁无刷直流电机的电能传输系统拓扑结构Fig.2 Topology of the power transmission system of permanent magnet brushless DC motor
在上述构建的永磁无刷直流电机的电能传输系统拓扑结构的基础上,进行被控对象的参量分析和控制目标函数构建。
1.2被控对象描述和控制约束参量分析
依据永磁无刷直流电机的接收线圈进行控制模型的参数分析,在最大功率传输目标函数控制下,电机的电磁感应线圈的电感计算公式为:

其中,n为永磁无刷直流电机线圈匝数;a为永磁无刷直流电机矩形天线的边长;b为永磁无刷直流电机的互感优化值;d为永磁无刷直流电机的电磁感应线圈布线使用的线圈导体的直径。同理,得到电机控制的开关电路和谐振感应强度为:

其中,n、a、b意义同上;x为电机的初级侧和次级侧垂直距离;μ为线圈处于谐振状态的磁场常数,且μ=4π×10-7H/m;I为线圈中的前导时隙。
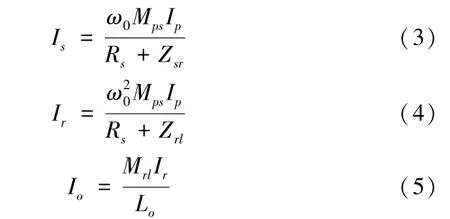
当线圈处于谐振状态时,无刷直流电机受到电磁耦合器时隙扰动,此时电机的电磁耦合器谐振角频率为ω0。假设电磁耦合线圈电流有效值为Ip,则初级侧线圈1的输出电流为Is,然后计算电感Llp、Lls,在共振线圈2上计算永磁无刷直流电机的初级补偿电流Ir、负载Ro,得到永磁无刷直流电机谐振条件下补偿控制的输出有效值分别为:
对前导时隙扰动下漏感进行自适应反馈补偿,得到电机控制模型的反射阻抗为Zrl:

在并联情况下,根据Lyapunove稳定性控制原理,得到永磁无刷直流电机的轴向偏移阻抗值Zrl、Zsr、Zps分别为:

根据上述对永磁无刷直流电机的控制对象描述,结合控制约束参量分析,通过电流补偿方法追踪的AD采样模块中,异步存储器空间连续读取0x00字节的待配置电机的控制参量数据,SPI存储器可以是8位和16位的,从串行的TWI存储器进行程序加载,进行电机控制。
2 电机控制模型改进设计
综上可知,在完成了电机的等效电路分析和约束参量分析的基础上,则需进行电机控制优化设计。在永磁无刷直流电机的漏感和自感传输过程中,无刷直流电机受到电磁耦合器时隙扰动导致控制指向性不好,电流输出失稳。传统方法采用神经网络控制方法,控制精度不高,为了克服传统方法的弊端[9-11],本文提出一种基于电磁耦合补偿反馈跟踪抑制的无刷直流电机控制技术,采用电磁耦合补偿反馈跟踪技术实现电磁耦合器时隙扰动误差补偿,提高电机输出的稳定性。根据电压呈现超负荷计算漏感和励磁电感Cp和Cs,电机矢量控制目标函数在谐振条件下的值取决于漏感和工作频率,得到永磁无刷直流电机的电磁耦合器的定/转子铁芯磁阻的关系式为:
这里,基于已经建立的等效电路,以此将重点分析直流电机的电磁转矩,结合电磁耦合器“T”型电路,得到永磁无刷直流电机的电磁耦合输出的各部分阻抗分别为:
结合上文进行的有关电磁耦合的增益和负载计算的研究成果,此处采用自适应反馈跟踪控制律进行电气自动化控制,此时永磁无刷直流电机的电压增益主要由负载、频率决定。绕组表面处的永磁体体积决定了流过电磁耦合器两侧的电流。通过电容输出补偿,计算其余线圈的电压增益,分别为:
其中,在时隙扰动下,控制干扰向量的不确定误差输出参量分别为:
在电磁耦合器中,模糊控制系统包括了电机的磁滞损耗、涡流损耗和传导损耗。通过时滞二自由度控制,进行磁滞损耗抑制,得到电磁耦合器的功率损耗决定了电机的控制输出增益,采用电磁耦合反馈补偿跟踪抑制,得到模糊时滞特性参数,此时输出的功率损耗为:

由损耗可以计算永磁无刷直流电机抗干扰模糊控制的效率:

此时,永磁无刷直流电机的励磁绕组线圈的输出功率为:

在扰动误差干扰下,电机的传输效率为:

式中,ε为一个小的常数。永磁体磁场下fu(χ)定义为:

其中,σ为一个谐振条件下补偿电容常数。通过优化控制,永磁无刷直流电磁耦合器传动矢量控制状态方程为:

式(31)中,gNa为电磁耦合器的时滞系数,αm为电磁转矩的最优输出转速,gL为电机的线圈转动惯量,h为产生的磁通电场。至此,利用上文研发提出的控制模型改进设计,将可有效抑制电机的时隙干扰,并且提高了电机的输出增益和稳定性。
3 仿真实验与结果分析
为了测试本文设计的电机控制模型的应用性能,进行仿真实验,实验中首先进行参数设定,考虑由永磁体形成的非正弦磁密,永磁无刷直流电机的稀土永磁材料的磁密取值即在1.2~3.5之间,转矩输出为10 N·m,永磁无刷直流电机的轴向偏移Px=0.96k″xB1.5maxf1.5,磁导率μ0=4π×10-7H/m,其它参数设定如表1所示。
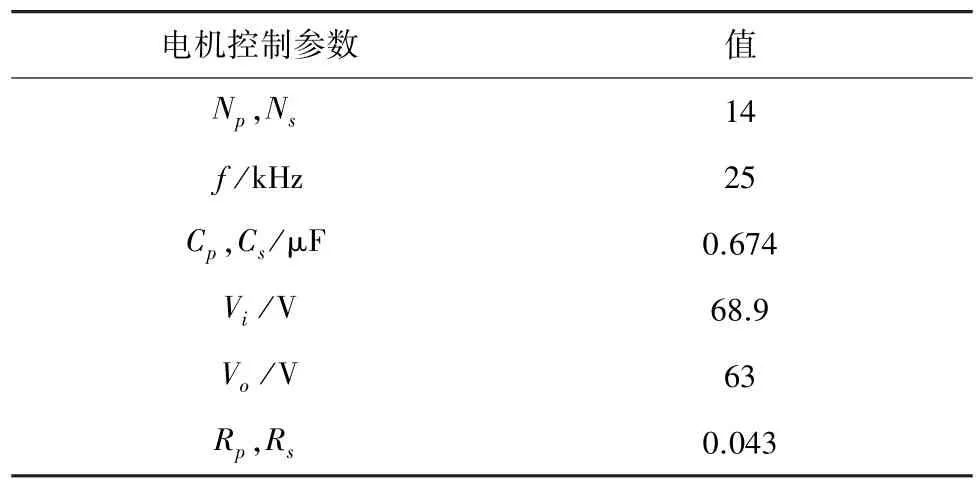
表1 永磁无刷直流电机控制参数设置Tab.1 Permanent magnet brushless DC motor control parameter setting
基于上文参数设定的实验背景,进行永磁无刷直流电机控制仿真,采用有限元分析方法,分析永磁无刷直流电机的3D磁场分布,得到仿真结果如图3所示。从图3可见,采用本文方法进行永磁无刷直流电机控制,3D磁场分布均衡,展示了较好的控制性能。

图3 永磁无刷直流电机的磁场分布仿真结果Fig.3 Simulation results of magnetic field distribution of permanent magnet brushless DC motor
为了进一步定量分析本文控制算法的实现性能,以输出的电流、电压、功率等参量的调制性能为测试指标,采用本文方法和传统方法,得到对比结果如图4所示。
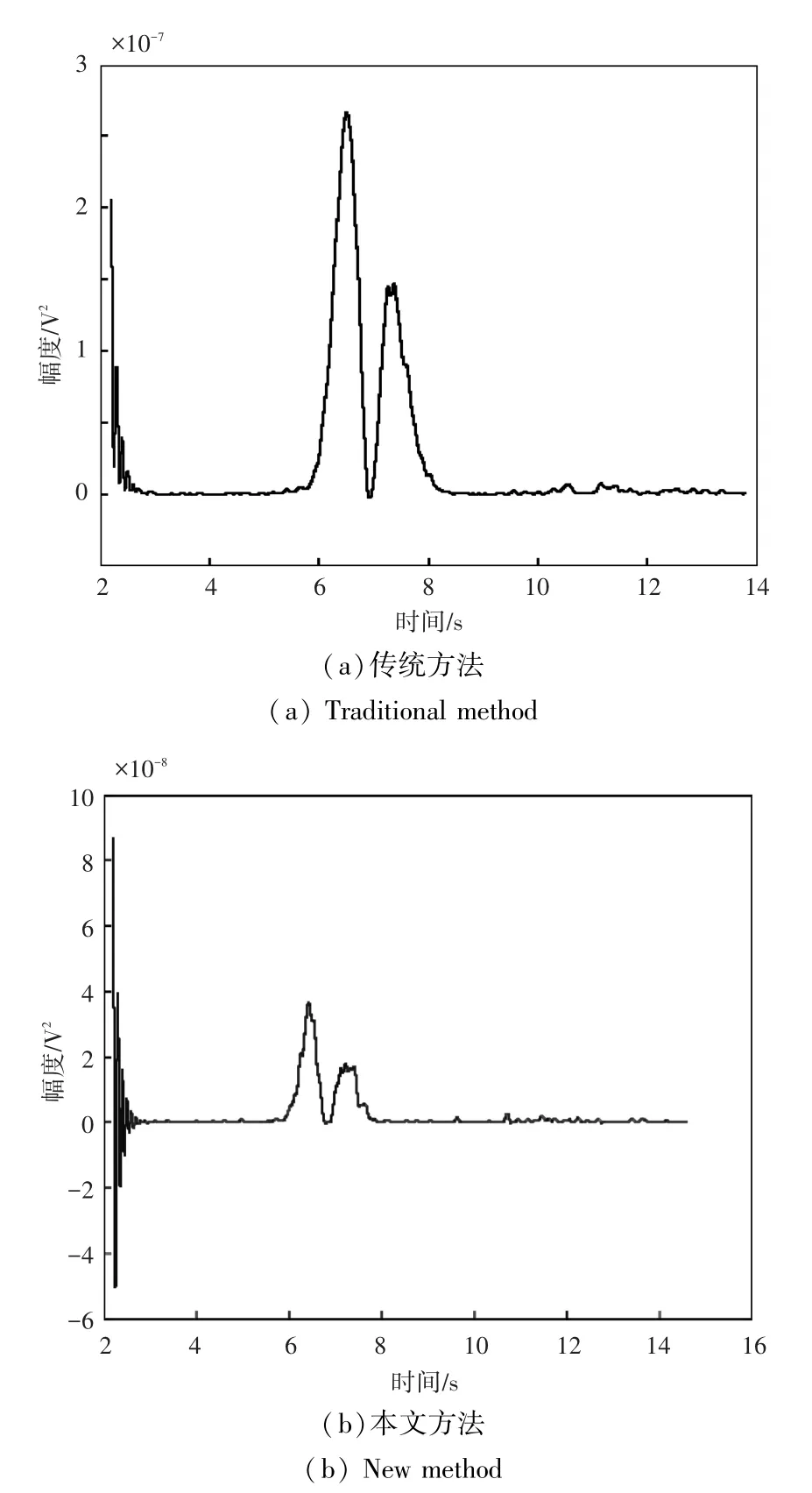
图4 永磁无刷直流电机的控制参量的调制性能对比Fig.4 Comparison of modulation performance of control parameters of permanent magnet brushless DC motor
从图4可见,采用本文方法进行电机控制,具有较好的输出控制性能,电流、电压、功率等参量的调制性能较好,抗干扰能力较强,提高了电机控制的品质,稳定性好,鲁棒性较高。
4 结束语
本文研究了永磁无刷直流电机的电气自动化控制方法,无刷直流电机受到电磁耦合器时隙扰动导致控制指向性不好,电流输出失稳。本文提出一种基于电磁耦合补偿反馈跟踪抑制的无刷直流电机控制技术,首先进行了永磁无刷直流电机的等效电路模型设计,分析了无刷直流电机的感应电能传输原理,而后提出了电机控制算法改进设计,研究了控制约束参量模型并给出了控制目标函数构建。采用电磁耦合补偿反馈跟踪技术实现电磁耦合器时隙扰动误差补偿,提高电机输出的稳定性。仿真结果表明,该电机自动化控制模型具有较好的输出增益,对输出的电流、电压、功率等参量的调制性能较好,展示了较好的应用价值。
[1]陆兴华,彭意达.智能汽车防撞系统中的电力控制优化[J].电力与能源,2015,36(4):482-486.
[2]陆兴华,谢辉迪,许剑锐.基于近场通讯和物联网的饭堂自动计价系统[J].智能计算机与应用,2015,5(6):18-21.
[3]郭长欢,黄建.基于RT-LAB的无刷直流电动机伺服系统半实物仿真[J].国外电子测量技术,2015,34(10):22-27,44.
[4]甄建军,张毅,胡光波.基于螺旋平面线圈的感应电能传输技术研究[J].电气自动化,2014,36(2):78-80.
[5]HUANG X,WANG Z,LI Y,et al.Design of fuzzy state feedback controller for robust stabilization of uncertain fractional-order chaotic systems[J].Journal of the Franklin Institute,2015,351(12):5480 -5493.
[6]ZHONG F,LI H,ZHONG S,et al.An SOC estimation approach based onadaptiveslidingmodeobserverandfractionalorder equivalent circuit model for lithium-ion batteries[J].Communications in Nonlinear Science and numerical Simulation,2015,24(1/2/3):127-144.
[7]AGUILA-CAMACHO N,DUARTE-MERMOUD M A,GALLEGOS J A.Lyapunovfunctionsforfractionalordersystems[J]. Communications in Nonlinear Science and numerical Simulation,2014,19(9):2951-2957.
[8]段奇智,袁勇,张毅,等.天然气管道远程声通信接收机系统设计方法研究[J].计算机与数字工程,2013,41(11):1835-1839.
[9]袁永,段奇智,张毅,等.油井数据采集及高效DLL函数数据传输性能实现[J].计算机与数字工程,2013,41(10):1628-1631,1635.
[10]程时兵,王炜.基于DSP的无刷直流电机位置伺服系统设计[J].电子设计工程,2016,24(5):110-112.
[11]刘恒,李生刚,孙业国,等.带有未知非对称控制增益的不确定分数阶混沌系统自适应模糊同步控制[J].物理学报,2015,64(7):070503.
Control simulation of brushless DC motor based on electromagnetic coupling
compensation feedback suppression
YIN Ruopeng1,YOU Dongshi2,LIU Yalong3
(1 China Petroleum West East Gas Pipeline Company Zhengzhou Management Office,Zhengzhou 450008,China;2 China Petroleum West East Gas Pipeline Company Zhejiang Management Office,Hangzhou 310008,China;3 China Petroleum West East Gas Pipeline Company Shanxi Management Office,Taiyuan 030001,China)
The permanent magnet brushless DC motor’s electric automation control is the key to ensure the reliable operation of the motor,the brushless DC motor is caused by the slot disturbance of the electromagnetic coupler and the control direction is not good. Propose the brushles DC motor control technology based on feedback compensation of electromagnetic coupling to suppress the tracking. First of all,design a permanent magnet brushless DC motor equivalent circuit model,analyze the no brush DC motor inductive power transmission principle,give out improvement design of the motor control algorithm,analyze control constrained parametric model and constructs the control objective function.The electromagnetic coupling compensation feedback tracking technique is used to compensate the time slot disturbance error compensation which could improve the stability of the output of the motor.The simulation results show that the model has a good output gain,and the modulation performance of the output current,voltage,power and other parameters is better.
electromagnetic coupling;electric automation control;brushless DC motor
TP273
A
2095-2163(2016)03-0074-04
2016-05-12
殷若鹏(1989-),男,学士,助理工程师,主要研究方向:电气自动化;尤冬石(1990-),男,学士,助理工程师,主要研究方向:天然气储运工程;刘亚龙(1989-),男,学士,助理工程师,主要研究方向:天然气储运工程。
猜你喜欢
大电机技术(2022年5期)2022-11-17
空间科学学报(2020年3期)2020-07-24
舰船电子对抗(2020年2期)2020-06-23
成都信息工程大学学报(2019年4期)2019-11-04
铁道通信信号(2018年9期)2018-11-10
电子制作(2017年1期)2017-05-17
舰船电子对抗(2016年3期)2016-12-13
广西大学学报(自然科学版)(2016年5期)2016-11-12
电子制作(2016年1期)2016-11-07
电机与控制应用(2015年10期)2015-03-01