
基于IVI-CFAR的模糊恒虚警
2016-11-30 05:25宋铁,周林,曹婷
电子技术应用 2016年1期
宋 铁,周 林,曹 婷
(武汉大学 电子信息学院,湖北 武汉430072)
基于IVI-CFAR的模糊恒虚警
宋铁,周林,曹婷
(武汉大学 电子信息学院,湖北 武汉430072)
将模糊逻辑和IVI-CFAR检测器相结合,提出了模糊IVI-CFAR检测器。模糊IVI-CFAR检测器将两个统计量进行模糊化并选择对应的模糊检测器计算相应的隶属函数,然后传给融合中心,融合中心根据这些值采用本文提出的模糊融合准则进行判决。仿真结果表明:模糊IVI-CFAR检测器在均匀背景下与传统IVI-CFAR检测器有相近的检测性能;在多目标背景下和杂波边缘背景下检测性能有明显的改善,在实际检测中有更强的鲁棒性。
模糊逻辑;隶属函数;模糊融合;多目标环境
0 引言
恒虚警检测器根据参考单元估计出的杂波功率来判断检测单元是否含有目标。单元平均恒虚警(CA-CFAR)在均匀环境下具有最小的检测损失[1],但在非均匀环境下,性能急剧下降。为了修正CA-CFAR,文献[2]和文献[3]提出了GO-CFAR和OS-CFAR检测器,分别提升了检测器在杂波边缘环境下的虚警控制能力和多目标环境下的抗干扰能力。文献[4]提出了有序统计恒虚警检测器(OS-CFAR)能适应多目标环境,但在杂波边缘环境下虚警尖峰控制力较差。CAO提出了开关选择CFAR(S-CFAR)检测器[5]。它不仅具有算法复杂度低的优点,而且在均匀环境和干扰目标环境下具有较好的检测性能,但是在杂波边缘环境下其虚警控制能力严重下降。为此,文献[6-7]分别对其进行了改进,但虚警控制能力仍然不足。Pourmottaghi提出了最大似然单元平均恒虚警检测器(MLC-CFAR),该检测器利用最大似然估计算法估计杂波边缘位置,在杂波边缘环境下能够获得较强的虚警控制能力,但无法适应多目标环境[8]。
为了应对复杂的检测环境,针对能适应不同背景杂波的智能恒虚警检测器的研究越来越多。Smith和Varshney提出了基于 ML(Mean Level)的可变性指示恒虚警(VI-CFAR)检测器[9],它集合了CA-CFAR、GO-CFAR和SO-CFAR检测器的优点,可以根据背景杂波自适应选择检测算法,然而在干扰目标同时出现在前、后沿参考滑窗时检测性能严重下降。针对此问题,文献[10]结合OS-CFAR检测器强抗干扰能力,提出了IVI-CFAR检测器,有效提升了检测器的检测性能。文献[11-13]又分别对VI-CFAR进行了改进,以提高检测器性能。但这些改进方法对检测性能的提升非常有限。最近,国外学者将模糊检测理论与目标检测方法相结合,提出了模糊恒虚警检测。文献 [14]将模糊逻辑与传统恒虚警检测器相结合,提出了模糊CA-CFAR和模糊OS-CFAR检测器。文献[13]提出的模糊VI-CFAR检测器仍不能适应前后滑窗均存在干扰目标的情况。本文将模糊逻辑与IVICFAR检测器相结合,提出了模糊IVI-CFAR检测器。文中分析了传统 IVI-CFAR在各种背景下的选窗概率并比较了它们的检测性能,结果表明,相较于传统的改进方法,本文提出的GFIVI-CFAR和MFIVI检测器不仅能适应多目标情况,还能有效提升检测效率,更能适应实际环境。
1 IVI-CFAR检测器
IVI-CFAR把参考滑窗分为前沿滑窗(A)和后沿滑窗(B)两部分,然后通过可变指示(VI)和均值比(MR)两个统计量来判断检测单元所处的杂波背景环境,并以此自适应选择不同的参考滑窗和检测算法,完成背景功率的估计。两个检验统计量如下[10]:

式中,xi代表滑动窗A或B平方律检波后的回波数据,为随机变量的样本均值。和分别代表滑窗A和滑窗 B的样本均值,n为半滑窗长度,n=N/2,N为整个参考窗长度。
由式(1)和式(2)计算出VI和MR,根据VI和预置KVI的比较结果来确定背景环是否均匀。检验公式如下[11]:

根据MR和阈值KMR的比较判断前后的均值是否相同。检验公式如下:

阈值 KVI和KMR的设定与虚警概率和设定的置信水平有关[4]。错误率α定义为将均匀环境误判为非均匀环境的概率。

与α定义类似,错误率β为:

IVI-CFAR的检测阈值由三类CFAR(CA,GO,OS)算法产生,表1为其自适应阈值产生算法[10],Z为杂波功率水平估计,T为IVI-CFAR检测的阈值因子,S为自适应阈值,S=T×Z。
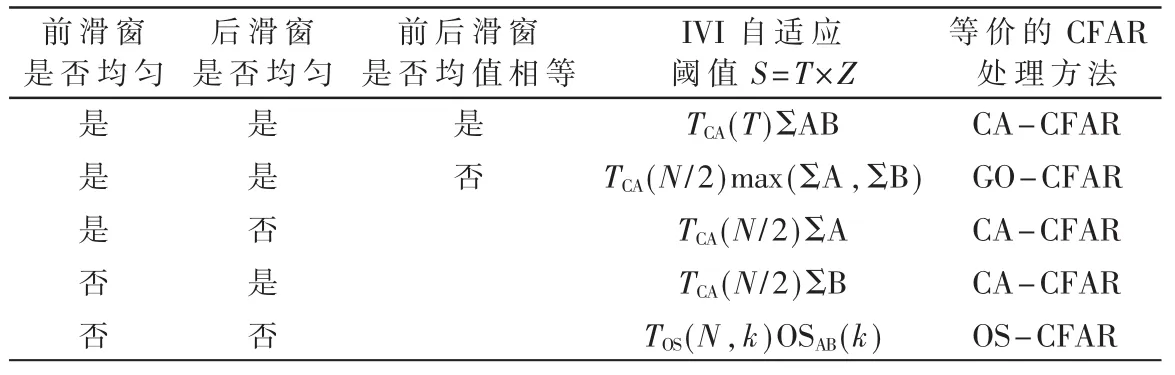
表1 IVI-CFAR自适应阈值产生算法
其中 OSAB(k)表示对整个参考滑窗从小到大排序后取第k个最小的有序统计量作为杂波功率水平估计。k一般取3N/4。
2 模糊IVI-CFAR检测器
2.1VI和MR的模糊化
在传统 IVI-CFAR检测器中,使用门限KVI和KMR用来确定背景杂波是否均匀,而在模糊IVI-CFAR中需要使用隶属函数,所以要将它们模糊化[13]。文中使用了一个阶梯隶属函数来模糊化参数 KVI,如图 1所示,其中 VI var代表非均匀环境,VI nvar代表均匀环境。

图1 参数VI的隶属度函数
文中同样用一个阶梯隶属函数来模糊化参数KMR,如图2所示。其中Mmony代表前后窗均值相同,Dmony代表前后滑窗均值不同。

图2 参数MR的隶属度函数
2.2模糊融合准则
模糊IVI-CFAR检测器采用模糊CA-CFAR、模糊GO-CFAR、模糊OS-CFAR检测器代替传统CA-CFAR、GO-CFAR、OS-CFAR检测器[14]。它们的隶属函数分别为:
(1)模糊CA-CFAR检测器:

(2)模糊GO-CFAR检测器:

(3)模糊OS-CFAR检测器:

(4)模糊IVI-CFAR检测器的算法与IVI-CFAR检测器类似,如表2所示。
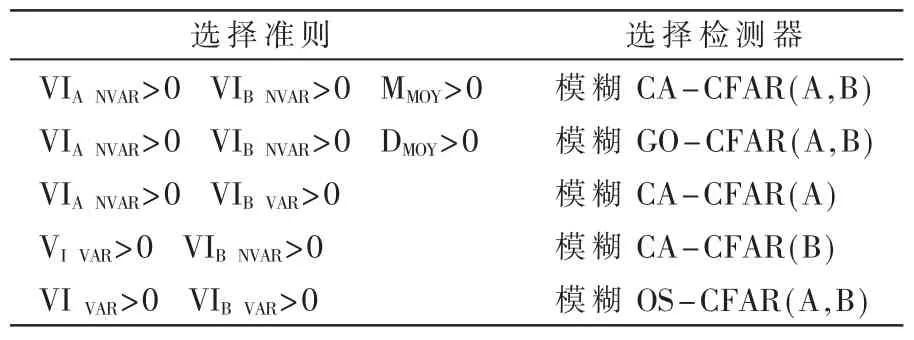
表2 模糊IVI-CFAR自适应逻辑
本文考虑的表2中模糊融合准则如下所示:
(1)选大融合准则
若模糊融合准则为选大融合准则,则:

(2)加权平均融合准则
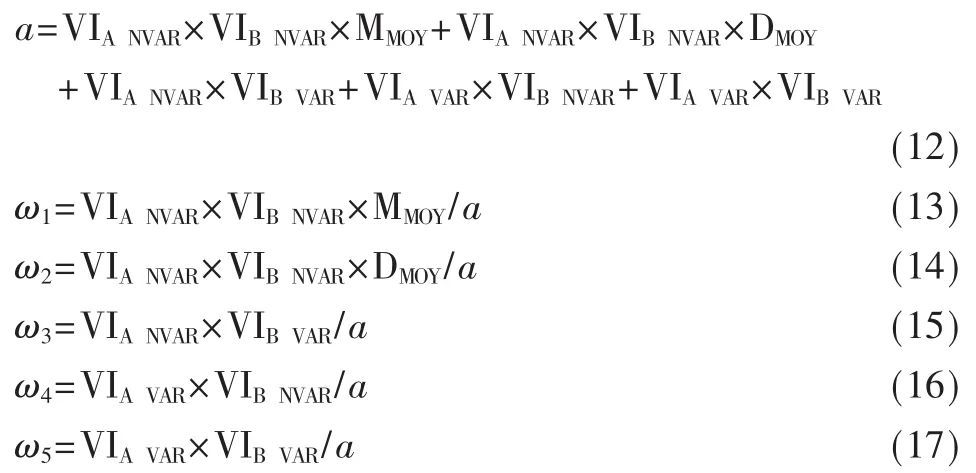
若模糊融合准则为加权平均融合准则[13],则:

式系数为:
按照表2选择对应的检测器计算隶属函数,并将结果送入融合中心按照融合准则计算全局隶属函数,最后解模糊,即将全局隶属函数的输出与判决门限比较,做出目标有无的判断。
模糊IVI-CFAR检测器原理图如图3所示。其中T是根据预设的警概率所确定的判决门限,通过Mont-carlo仿真得到。

图3 模糊IVI-CFAR检测器原理图
3 仿真与性能分析
采用Monte-Carlo仿真,在均匀背景、多目标环境以及杂波边缘背景 3种情况下仿真。将 MFIVI(选大模糊IVI)、GFIVI(加权平均模糊 IVI)与 IVI(传统 IVI)、VI(传统VI)检测器进行对比。仿真次数为106次,虚警概率Pfa=1×10-3,被检测目标和干扰目标类型均为Swerling II型。
3.1均匀环境
图4为在均匀背景下的IVI-CFAR检测器依据统计量 VI和 MR进行策略选择的概率[12]。由图可知,IVI检测器在不同信噪比条件下以98%的高概率选择整个参考滑窗进行背景杂波功率估计,也间接证明了IVI检测器在均匀环境下有接近于CA-CFAR检测器的性能。

图4 均匀环境下IVI-CFAR检测器策略选择概率
图5为均匀杂波背景下各检测器的检测性能。可见,在均匀背景下,GFIVI和MFIVI检测器均很好保留了IVI在均匀背景下的检测性能。
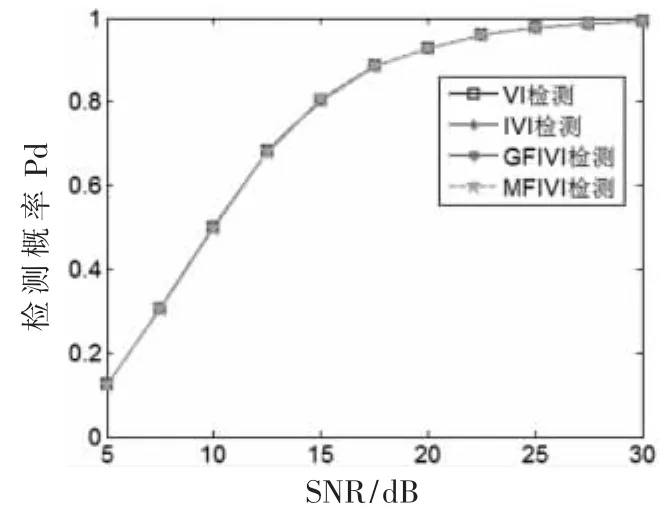
图5 均匀背景下VI、IVI、GFIVI和MFIVI的检测性能
3.2多目标环境
在多目标环境下,文中假设干扰目标功率与主目标功率相等,即信噪比等于干噪比,且在检测单元内不包含干扰目标。为了分析干扰目标环境对检测器检测性能的影响,文中根据干扰目标的位置,将多目标的情况分为两种进行讨论,即干扰目标仅位于单侧滑窗和前后两个滑窗均存在干扰目标。图6为当单侧参考滑窗中存在4个干扰目标时 IVI-CFAR的策略选择概率。从理论上说当仅在前半参考滑窗存在干扰目标时,IVI检测器应该选择后半参考滑窗B进行杂波功率估计。但由图可以看出在SNR小于20 dB时IVI选择GO算法的概率要大于选择后半参考滑窗B的概率。当SNR大于20 dB时虽然选择滑窗B的概率最大,但选择GO算法的概率仍然很大。而在多目标环境下,GO检测器将抬高检测阈值,严重影响检测性能。
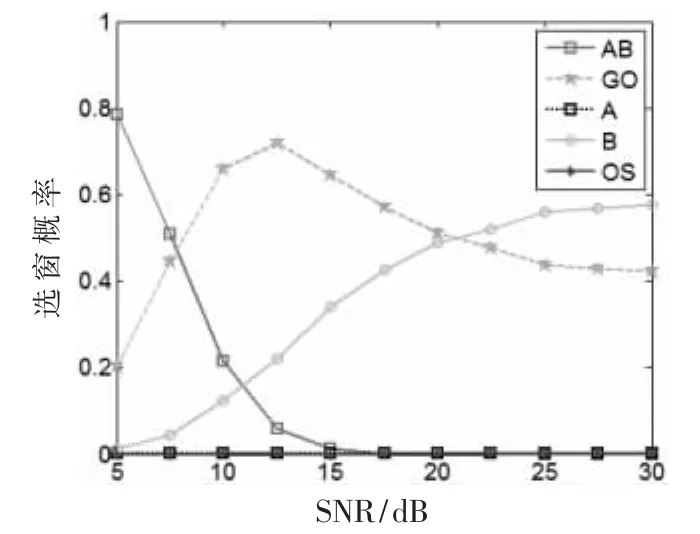
图6 前侧滑窗存在4个干扰目标下IVI-CFAR检测器策略选择概率
图7为在前侧参考滑窗存在3个干扰目标时各检测器的检测性能。在这种情况下 IVI和VI有相同的检测策略,因此两个检测器的检测性能相近。在干扰位于单侧滑窗时两种模糊类恒虚警检测器较传统恒虚警检测器均有明显的提高。这是因为传统恒虚警检测器采用固定门限不能够准确地判定出背景环境,当判断错误时会选择错误的策略进而使检测性能下降。而模糊类恒虚警检测器将判定门限模糊化,使得检测器不再固定地仅选一种检测策略,而是综合考虑各个检测策略,由此提高了检测性能。由图中局部放大部分可知,加权平均模糊类检测器较选大模糊类检测器检测性能稍好。

图7 前侧滑窗有3个干扰目标时VI、IVI、GFVI和MFVI的检测性能
图8分析了在前后沿参考滑窗中各插入3个干扰目标时各检测器的检测性能。由图可看出VI检测性能严重下降。这是因为在这种情况下无论VI检测器选择哪种策略求和进行背景杂波估计都会抬高检测阈值。而IVI在这种情况下使用了OS检测算法,虽然会产生一定检测损失,但可以提升检测器的抗干扰能力,因此能有较好的检测结果。而两种模糊类恒虚警检测器的性能较IVI有明显提升,这是因为同干扰目标仅在前半参考滑窗的情况类似,也存在错误判断检测背景类型进而选择错误检测策略的问题。而模糊类恒虚警检测器可以有效改善这种情况。由局部放大部分可得,加权平均模糊类检测器性能强于选大模糊类检测器检测。

图8 前后滑窗各两个干扰目标时VI、IVI、GFVI和MFVI的检测性能
3.3杂波边缘环境
杂波边缘环境下,假设杂波服从瑞利分布,杂波边缘位置位于第10个参考单元,强弱杂波功率比CNR为7 dB,各检测器的性能曲线如图 9所示。由图可知,在杂波边缘环境下,模糊类恒虚警检测器的检测性能与传统恒虚警检测器相比具有明显优势。而由局部放大部分可知,加权平均模糊检测器仍然强于选大模糊检测器。

图9 CNR=7 dB,杂波边缘位置在第10个参考单元时检测器的检测性能
4 总结
本文将IVI-CFAR检测器与模糊逻辑相结合,提出了一种新的CFAR检测器。通过仿真发现,文中所提的基于模糊化改进的检测器性能较传统改进方法性能提升幅度更大。在均匀环境下能保持VI检测器的稳健性;在多目标环境下不仅不受干扰位置的影响,而且检测性能有很大提升;在杂波边缘环境下检测性能也比传统检测器要好。而基于加权平均融合准则的模糊检测器在多目标情况下的检测性能优于基于选大融合准则的模糊检测器;但在杂波边缘环境下,基于选大融合准则的模糊检测的虚警控制能力强于基于加权平均融合准则的模糊检测器。
[1]MOHAMMAD A K,MOHAMMAD H B.Adaptive CFAR processor for nonhomogeneous environments[J].IEEE Trans on Aerospace and Electornic System,2000,36(3):889-897.
[2]HANSEN V G.Constant false alarm rate processing in search radars[C].Proc of IEEE International Radar Conferencr. 1973:325-332.
[3]WEISS M.Analysis of some modified cell-averaging CFAR processors in multiple target situations.IEEE Trans.Aerosp.Electron.Syst.18(1)(1982)102-114.
[4]ROHLING H.Radar CFAR thresholding in clutter and multiple target situation[J].IEEE Trans on Aerospace and Eletornic System,2000,36(3):837-847.
[5]CAO T V.Conatant false-alarm algorithm based on test cell information[J].IET Radar,Sonar and Navigation,2008,2(3):200-213.
[6]ERFANIAN S,VAKILI V T.Introducing excision switching-CFAR in K distributed sea clutter[J].Signal Processing,2009(89):1023-1031.
[7]Leila Table,Faouzi Soltani.A generalized switching CFAR processor based on test cell statistics[J].SIViP,2009(3):265-273.
[8]POURMOTTAGHI A,TABAN M R,NOROUZI Y,et al.A robust CFAR detection with ML estimation[C].Proc.of IEEE Radar Conference,2008:1-5.
[9]SMITH M E,VARSHNEY P K.Intelligent CFAR processor based on data variability[J].IEEE Trans on Aerospace and Electornic System.2000,36(3):837-847.
[10]HAMMOUDI Z,SOLTANI F.Distributed IVI-CFAR detection in homogeneous and non-Homogeneous environments[J]. Signal Process.2004,84(7):1231-1237.
[11]杜海明,马洪.一种改进的MVI-CFAR检测器的性能分析[J].计算机工程与科学,2012,34(11):163-168.
[12]Li Yang,Bing Fei,Zhang Ning,et al.A switching varibility index(SVI)CFAR Detector[J].International Conference on Radar,2014,25(4):580-587.
[13]KHAIREDDINE C,FAOUZI S.Performance of the Fuzzy VI-CFAR detector in Non-homogeneous Environments[C]. IEEE International Conference on Signal and Image Processing Applications,2011:100-103.
[14]HAMMOUDI Z,SOLTANI F.Distributed CA-CFAR and OS-CFAR detection using fuzzy spaces and fuzzy fusion rules[J].IEEE Proc.Radar Sonar and Navigation,2004,151(3):135-142.
Performance of IVI-CFAR based on fuzzy fusion rules
Song Tie,Zhou Lin,Cao Ting
(School of Electronic Information,Wuhan University,Wuhan 430072,China)
A new fuzzy IVI-CFAR scheme based on fuzzy logic and IVI-CFAR detector was proposed in this paper.Fuzzy IVICFAR established a new detection strategy based on the fuzzificastion of two statistics and selected the appropriate fuzzy detector to calculate the membership function value.Then send the value to a fusion center to make a decision which is propsed in this paper accroding to the fuzzy fusion rule.The simulated results show that the fuzzy IVI-CFAR detector have the similar detection performance compare with the classical IVI-CFAR detector in homogeneous environment.It has improved in non-homogeneous environment significantly.It is more robust in practice.
fuzzy logic;membership;fuzzy fusion;non-homogeneous environment
中国分类号:TN957.51A
10.16157/j.issn.0258-7998.2016.01.030
2015-08-06)
宋铁(1989-),男,硕士研究生,主要研究方向:雷达目标检测。
周林(1987-),男,博士研究生,主要研究方向:软件无线电、无线电定位技术。
曹婷(1990-),女,博士研究生,主要研究方向:雷达信号处理。
中文引用格式:宋铁,周林,曹婷.基于 IVI-CFAR的模糊恒虚警[J].电子技术应用,2016,42(1):115-118,122.
英文引用格式:Song Tie,Zhou Lin,Cao Ting.Performance of IVI-CFAR based on fuzzy fusion rules[J].Application of Electronic Technique,2016,42(1):115-118,122.
猜你喜欢
兵工学报(2022年11期)2022-12-01
科学与信息化(2021年30期)2021-12-24
物联网技术(2019年9期)2019-11-06
火力与指挥控制(2018年10期)2018-11-13
科学与财富(2017年24期)2017-09-06
科技视界(2017年10期)2017-08-21
中国交通信息化(2017年9期)2017-06-06
电子制作(2017年10期)2017-04-18
工业设计(2016年11期)2016-04-16
西北工业大学学报(2015年3期)2015-12-14
