
工业机器人实验平台设计
2016-12-02 04:29王栋花文超李祺朱剑王飞胡泽黎
中国高新技术企业 2016年23期
王栋 花文超 李祺 朱剑 王飞 胡泽黎


摘要:为满足本科生实验教学需要,构建Delta机器人实验平台,平台配置的OMRON运动控制系统以NJ控制器为中心,通过EtherCAT网络将运动、逻辑、视觉控制等功能合而为一,利用软件Sysmac Studio的配置、编程、仿真、监控功能和视觉传感器的检测功能,在工业机器人实验平台上完成了“检测、跟踪、抓取、搬运”实验,证明了设计方案的可行性。
关键词:工业机器人;NJ控制器;Sysmac Studio;视觉分拣;物料搬运 文献标识码:A
中图分类号:TP242 文章编号:1009-2374(2016)23-0027-03 DOI:10.13535/j.cnki.11-4406/n.2016.23.012
Delta机器人属于高速、轻载的并联机器人,一般通过示教编程或视觉系统捕捉目标物体,由三个并联的伺服轴确定抓具中心(TCP)的空间位置,实现目标物体的运输、加工等操作,主要应用于食品、药品包装和电子产品装配等行业。
采用Sysmac Studio软件设计的Delta机器人控制系统,通过NJ控制器内置的EtherCAT高速通信端口,提高图像处理系统、控制器及伺服驱动器输入输出数据处理的速度,实现高速、高精度控制,在线拾取移动速度较快的工件。同时,由于实现了一体化控制,编程语言得到了统一,从开发和维护的角度来说,提高了实时性和维护性。此外,使用Sysmac Studio软件平台,通过简单的设定即可完成对控制器、网络、伺服以及其他现场设备的配置,通过内部功能块即可完成复杂的运动控制,并可使用NS统合模拟及仿真功能,提高程序的调试效率。而在实际现场,通过使用标准的RJ45连接器,即可将控制器与现场设备进行简单快速连接,因此两者的结合充分实现了Delta机器人在实际应用中的价值。
目前国内的机器人实验平台主要侧重于机器人的组成结构和原理方面的介绍、串联机器人示教编程的设计,对机器人技术的应用涉及较少,限制了学生在实验平台上的动手机会。本文构建的工业机器人实验平台可以进行多项并联机器人应用方面的实验,再结合机器视觉系统,引入机器人分拣的概念,贴近生产现场实际工况,更能激发学生的学习和研究兴趣。
1 实验平台的硬件组成
工业机器人实验平台主要由OMRON自动化运动控制系统、4轴Delta并联机械手、OMRON机器视觉检测系统、编程设备及相关软件4个部分组成。包括:
1.1 OMRON自动化运动控制系统
包括:基于NJ501-4310CPU的机械手控制专用CPU主机单元、主机电源、高速计数单元、开关量输入/输出单元、伺服驱动器与伺服电机、触摸屏、相关电缆,还有部分传感器、开关、继电器及连接线、接线端子等附件。
1.2 4轴Delta并联机械手
包括:4轴Delta并联机械手本体、外围流水线机架(两条输送带及控制输送速度的变频器、电机、旋转编码器、位置检测相关传感器等)。
1.3 OMRON机器视觉检测系统
包括:基于FZ3-350 Z的图像传感器控制器,FZ-SC2M系列200万像素工业机及相关镜头、光源、显示器、通讯电缆等。
2 机器人工作原理
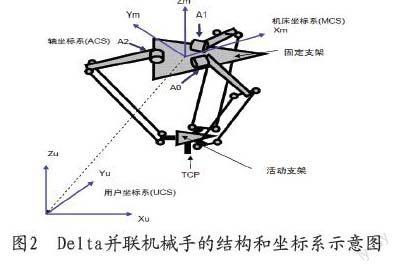
2.1 Delta并联机械手的结构
如图2所示,Delta机器人的机械部分主要由固定支架、机械臂、可动支架三部分组成。三台伺服电机驱动A0、A1、A2三个关节,实现活动机架的定位。根据需要,在活动机架上还可以安装旋转头,由安装在固定支架上的第四个伺服电机通过传动轴控制抓具(TCP)中心转动。
2.2 Delta并联机械手的动作流程
如图3所示,从任意的点A(X1、Y1、Z1)开始到达传送带上的任意的点B(X2、Y2、Z2)为止进行门型动作。点A为Pick位置、点B为Place位置。往复动作的方法如下:(1)绝对位置移动。从当前位置到某一点(X2、Y2、Z2)之间进行绝对位置移动;(2)Pick&Place动作(输送带跟踪)。从某一点(X1、Y1、Z1)到某一点(X2、Y2、Z2)之间进行门型动作,某一点(X2、Y2、Z2)示意的是传输带上的工件坐标,机械手与传输带同步运动;(3)Pick&Place动作(定点间)从某一点(X1、Y1、Z1)到某一点(X2、Y2、Z2)之间进行门型动作。
2.3 Delta机械手的拾取原理
机器人用NJ系列CPU单元中使用以下三种坐标系:
2.3.1 轴坐标系(ACS)。机械手主动臂与固定支架平面在同一方向时的位置为0度,下侧为正方向,上侧为负方向,所有轴均相同。轴伺服驱动器也根据此坐标系设定,如图4所示:
2.3.2 机床坐标系(MCS)。如图2所示(Xm,Ym,Zm)的笛卡尔坐标系就是机床坐标系(MCS),与轴坐标系(ACS)有确定的转换关系。
2.3.3 用户坐标系。用户坐标系(UCS)是虚拟坐标系,工件在机床坐标系和视觉坐标系中的坐标将统一转换成用户坐标系的坐标(Xu,Yu,Zu),以方便机械手对传送带上的移动工件通过视觉检测来拾取。用户坐标系的Xu轴和输送带运行方向一致,原点可以设计成和机床坐标系相同。根据输送带上三个点MCS坐标(Xmi,Ymi,Zmi)计算出用户坐标系相对机床坐标系的偏转角度(Rx,Ry,Rz),从而确定用户坐标系。角度计算用功能块“FB_3D_Coordinate_Conver”,确定坐标系用功能块“MC_DefineCoordSystem”。
如图5所示,视觉传感器可以识别通过输送带进入视野区域中的工件,来自于NJ控制程序的视觉触发信号根据输送带位置确定,输送带每移动一个固定的长度,发送一个信号给视觉控制器,触发视觉拍照。获取触发时刻输送带位置和工件拍摄坐标后,根据公式:输送带当前位置-触发时刻输送带位置+拍摄坐标=工件当前位置,当循环计算出来的工件当前位置在机械手可抓取区域内时,发出机械手抓取信号,抓取的目标位置为计算出的工件当前位置。
3 机器人实验功能
3.1 门型物料搬运实验
Delta机械手抓取目标工件时,以走门字形运动轨迹为主。本系统Pick&Place动作轨迹规划如图6所示,其中点A为Pick位置、点B为Place位置,点C为一个动作流程的结束位置。其中点A的位置由视觉处理分析获得,而点B和点C位置由用户设定。当视觉传感器检测到工件时,执行MC_SyncLinearConveyor指令,机器人与输送带做同步动作,机器人从当前位置追随工件,追上后抓取工件,并与输送带继续同步动作,如图示动作①和②。经过轨迹目标时间后,工件当前反馈的位置与指令设定的目标位置一致时,执行MC_SyncOut指令,采用同步停止的方式解除同步,如图示动作③。然后执行MC_MoveTimeAbsolute指令,向点B做门型动作,当在指定时间内到达B点时,机械手的TCP变为FALSE,如图示动作④。再通过C_MoveTimeAbsolute指令,向B点正上方的C点进行移动,如图示动作⑤,此时一个动作流程结束。当传感器检测到下一个工件时,如图动作⑥所示,机械手向A点进行门型动作,动作原理同动作①,只是此时的开始位置变成了点C。如此循环执行Pick&Place动作,直到有停止指令。
3.2 在线视觉分拣实验
在使用视觉获取坐标并控制机械手进行抓取时,首先统一视觉与机械手两者之间的坐标系,然后按输送带移动长度定间隔触发视觉,根据循环计算的结果,控制机械手在可抓取区域抓取工件。本系统可通过视觉处理进行工件形状、颜色、缺陷的NG(合格性)判断,决定是否对工件进行抓取,也可以抓取流动的混合工件定点摆放。同时通过识别工件在输送带上的摆放姿势,输出位置偏移角度数据,控制机械手抓取后,通过旋转伺服轴实现定位摆放。
4 结语
Delta机器人作为大学生实验平台,其高效、高精度的特点与现代工业高速发展紧密结合,学生通过相关课程学习和实验能够了解和熟悉Delta机器人的原理,为今后的学习和工作奠定基础。
项目中软硬件系统均符合当前自动化系统开放式、模块化、可重构和智能化等发展趋势,掌握应用于工业领域的机器人技术、计算机技术、自动控制技术、高速实时网络通讯等高新技术,为后续开发这类自动化生产线提供典型案例和积累经验,开辟机器人在新型产业中应用的广阔前景。
参考文献
[1] 殷盛江,于复生,时维康,孙中国.Delta机器人控制系统设计[J].起重运输机械,2015,(1).
[2] 邹腾跃,唐小琦,宋宝,陈吉红.基于形状内容分析的机器人物料分拣系统[J].组合机床与自动化加工技术,2013,(5).
[3] 焦恩璋,杜荣.工业机器人分拣技术的实现[J].组合机床与自动化加工技术,2010,(2).
[4] 邓明星.并联Delta机器人的传送带动态抓取系统设计[D].广东工业大学,2014.
[5] 郎需林,靳东,张承瑞,张岳,王云飞,刘亚男.基于实时以太网的DELTA并联机械手控制系统设计[J].机器人,2013,(5).
[6] 王月芹.基于欧姆龙NJ控制器机械手控制系统设计
[J].机电产品开发与创新,2013,(3).
作者简介:王栋(1994-),男,四川巴中人,江苏大学机械工程学院本科学生,研究方向:机械电子工程。
(责任编辑:黄银芳)
猜你喜欢
中国环境监察(2016年7期)2016-10-23
通信电源技术(2016年1期)2016-04-16
通信电源技术(2016年1期)2016-04-16
通信电源技术(2016年5期)2016-03-22
设备管理与维修(2016年5期)2016-03-16
橡胶工业(2015年10期)2015-08-01
机电信息(2015年3期)2015-02-27
电视技术(2014年7期)2014-03-11
河南科技(2014年11期)2014-02-27
河南科技(2014年14期)2014-02-27
