
机载激光雷达和高光谱组合系统的亚热带森林估测遥感试验①
2016-12-05 03:13刘清旺谭炳香胡凯龙李增元李世明
高技术通讯 2016年3期
刘清旺 谭炳香 胡凯龙 樊 雪 李增元 庞 勇 李世明
(*中国林业科学研究院资源信息研究所, 林业遥感与信息技术重点开放性实验室 北京 100091)(**中国矿业大学(北京)地球科学与测绘工程学院 北京 100083)
机载激光雷达和高光谱组合系统的亚热带森林估测遥感试验①
刘清旺②*谭炳香*胡凯龙***樊 雪*李增元*庞 勇*李世明*
(*中国林业科学研究院资源信息研究所, 林业遥感与信息技术重点开放性实验室 北京 100091)(**中国矿业大学(北京)地球科学与测绘工程学院 北京 100083)
为了提高森林的类型识别及生物物理参数反演精度,采用国产机载激光雷达和高光谱组合系统(ALHIS),选择湖北典型亚热带森林开展了航空遥感试验,获取了试验区激光雷达点云、高光谱和CCD影像数据,提取了森林高度和优势树种类别信息。对数据的分析表明,激光雷达林分平均高的估测精度达到90.67%,激光雷达估测平均高与地面实测胸径加权平均高之间显著相关(R2=0.73,RMSE=1.29m)。按照优势树种分类结果进行统计,发现马尾松、栓皮栎和其它树种的林分平均高分别为9.62m、9.30m、8.79m,不同树种之间的林分平均高相差不大。高光谱优势树种识别总体精度达到82.00%(Kappa=0.70),试验区森林和非森林面积所占比例分别为60.01%和39.99%,马尾松、栓皮栎和其它树种面积在森林中所占比例分别为59.77%、24.99%和15.23%。试验证明,ALHIS能够同时获取高分辨率的植被遥感特征数据,以用于森林制图、优势树种/树种组识别、碳储量估算及生态环境建模等研究。
森林高度, 优势树种, 激光雷达(LiDAR), 高光谱, 分类
0 引 言
森林作为具有复杂结构功能的陆地生态系统,在减缓全球气候变化中具有重要作用[1-3]。森林空间位置分布及垂直结构变化反映了不同区域植被对微气候的调节能力、森林生产力及碳储存能力[4-6]。激光雷达(light detection and ranging, LiDAR)作为一种主动遥感技术,可直接获取地表对象表面点的三维坐标,它对植被空间结构和地形的探测能力很强,能够提取冠层垂直结构参数[7-9],用于生态过程研究和森林经营管理、林火行为模拟、野生动物栖息地、碳源和碳汇研究等[10,11]。激光雷达与被动光学遥感的工作机理不同,它具备探测植被三维空间结构的能力,但无法提供植被的光谱特征信息。高光谱能够获取不同类型植被的光谱特征信息,用于树种或树种组分类、森林健康状况监测等[12-14]。通过综合激光雷达和光学成像仪等主被动传感器,可以提高植被精细类型识别及生物物理参数反演精度[15-18]。高精度激光雷达反演的森林参数还可以用作光学遥感的训练数据和验证数据,实现区域尺度森林结构参数制图[19-22]。
由于早期激光雷达和光学成像仪为各自独立的数据获取系统,只有通过重复飞行的方式,才可以获得同一区域的多种传感器数据。针对多传感器集成的应用需求,美国推出了一系列多传感器集成系统,例如美国国家生态观测网研制了机载观测平台(airborne observation platform, AOP),AOP集成了可见/短波红外成像光谱仪、波形激光雷达和高分辨率航空相机[15];美国斯坦福大学研制了卡耐基航空观测平台(Carnegie airborne observatory, CAO),CAO试验系统集成了可见/近红外成像光谱仪和波形激光雷达[14],CAO-2代系统集成了可见-短波红外成像光谱仪、双波长波形激光雷达和高空间分辨率可见-近红外成像光谱仪[17];美国宇航局戈达德(Goddard)空间中心研发了由激光雷达(LiDAR)、高光谱(Hyperspectral)和热(Thermal)成像仪组成的系统,简称为G-LiHT系统,并在美国北部、南部森林开展了多次飞行实验[16]。同一时期,中国林业科学研究院(CAF)从德国定制了由激光雷达(LiDAR)、航空相机(CCD)和高光谱(Hyperspectral)三种传感器组成的系统,简称为CAF-LiCHY系统,该系统单次飞行就可以同步获取激光雷达和光学数据,用于中国不同森林试验区的应用研究[23]。我国在激光雷达和光学传感器集成系统及处理软件方面的研究相对滞后,为了提升国产多传感器集成技术的水平,在国家科技项目的支持下,我们研制了具有自主产权的机载激光雷达和高光谱组合系统(Airborne LIDAR and Hyperspectral Integrated System, ALHIS),并利用该系统在湖北典型试验区获取了多传感器航空遥感数据。本文对森林试验区的激光雷达和高光谱数据进行了分析,以评价ALHIS在森林高度和森林类型信息提取方面的应用能力。
1 试验区与数据
1.1 试验区
森林试验区位于湖北省荆门市东宝山,属于北亚热带湿润气候区,试验区位置如图1所示,地理坐标为东经112:01:08E-112:13:46E,北纬30:58:18N-31:07:42N,海拔71m~340m,森林类型为常绿针叶和落叶阔叶林,优势树种主要包括马尾松(PinusmassonianaLamb.)、栓皮栎(QuercusvariabilisBl.)等。

图1 森林试验区位置示意图
1.2 ALHIS系统
ALHIS系统由激光扫描仪、高光谱成像仪和航空相机三种传感器组成,融合了全球定位系统(global position system, GPS)和惯性导航系统(inertial measurement unit, IMU),激光扫描仪用于观测森林三维垂直结构以及林下地形,高光谱成像仪用于观测不同树种的光谱特征,航空影像用于辅助激光雷达数据处理和地面调查,采用GPS同步观测地面控制点。ALHIS系统的激光扫描仪是中国科学院上海技术物理研究所研制的LRS200A,激光波长为1064 nm,脉冲重复频率为200kHz,最多可以记录4次回波;高光谱成像仪为中国科学院上海技术物理研究所研制的PHI,波长范围为400nm~1000nm,光谱波段数为270个,空间维像元数为480个;航空相机型号为飞思IXA180,成像波段为真彩色,图像尺寸为10328×7760。ALHIS技术主要指标见表1。

表1 ALHIS技术指标
森林试验区的航线设计需要考虑激光点云密度、高光谱像元分辨率、航片像元分辨率和航带重叠率等因素,由于三种传感器的视场角不同,导致同一飞行平台上三种传感器的航带重叠率也不同。以激光雷达扫描仪为主要传感器进行设计,航带重叠率30%以上。飞行平台选择运输机,机型为运5,机舱底部开有窗口,可以安置机载激光雷达和高光谱成像仪组合系统主体部分,控制器及数据记录器安装在旁边。
森林试验区航空数据观测时间为2014年12月4日,共飞行了6条航线,航线分布如图2所示。图2中ASL_MIN、ASL_MAX和ASL_AVG分别表示各航线飞行高度的最小值、最大值和平均值;AGL_MIN、AGL_MAX和AGL_AVG分别表示各航线距离地面飞行高度的最小值、最大值和平均值。图2(a)为航线水平分布,图2(b)为航线高程分布,平均航线长度为24.70km,航线长度之和为148.20km,平均飞行速度为48.50m/s,即174.60 km/h,航线的平均海拔为875.97m,距离地面的平均高度为715.84m。

图2 飞行航线分布图
1.3 LIDAR数据
激光雷达点云数据为来自森林冠层、林下地形等地物的回波点,全部点个数为0.93亿,点云覆盖面积43.28km2。点云密度决定了对植被垂直结构描述的详细程度,其空间分布如图3所示,点云密度平均值为2.16点/m2,最小值为0.04点/m2,最大值为48.32点/m2。由于飞行平台受空气湍流影响,沿着航向方向的点云密度呈现疏密相间的特征;激光扫描仪采用正弦振镜扫描方式,扫描线边缘处的点云密度明显高于扫描线内部的点云密度。测区存在很多水体,例如河流、水库、水塘等,使得点云数据中出现不少孔洞现象。

图3 点云密度分布图
激光雷达点云数据高度包含了地形信息以及位于地表之上的植被、建筑物等地物信息,其空间分布如图4所示,点云高程平均值为163.26m,最小值为71.18m,最大值为330.48m。从图中可以看出,从西北向东南,森林试验区高程具有逐渐降低的趋势,测区高程落差为259.30m,属于低山丘陵特征。
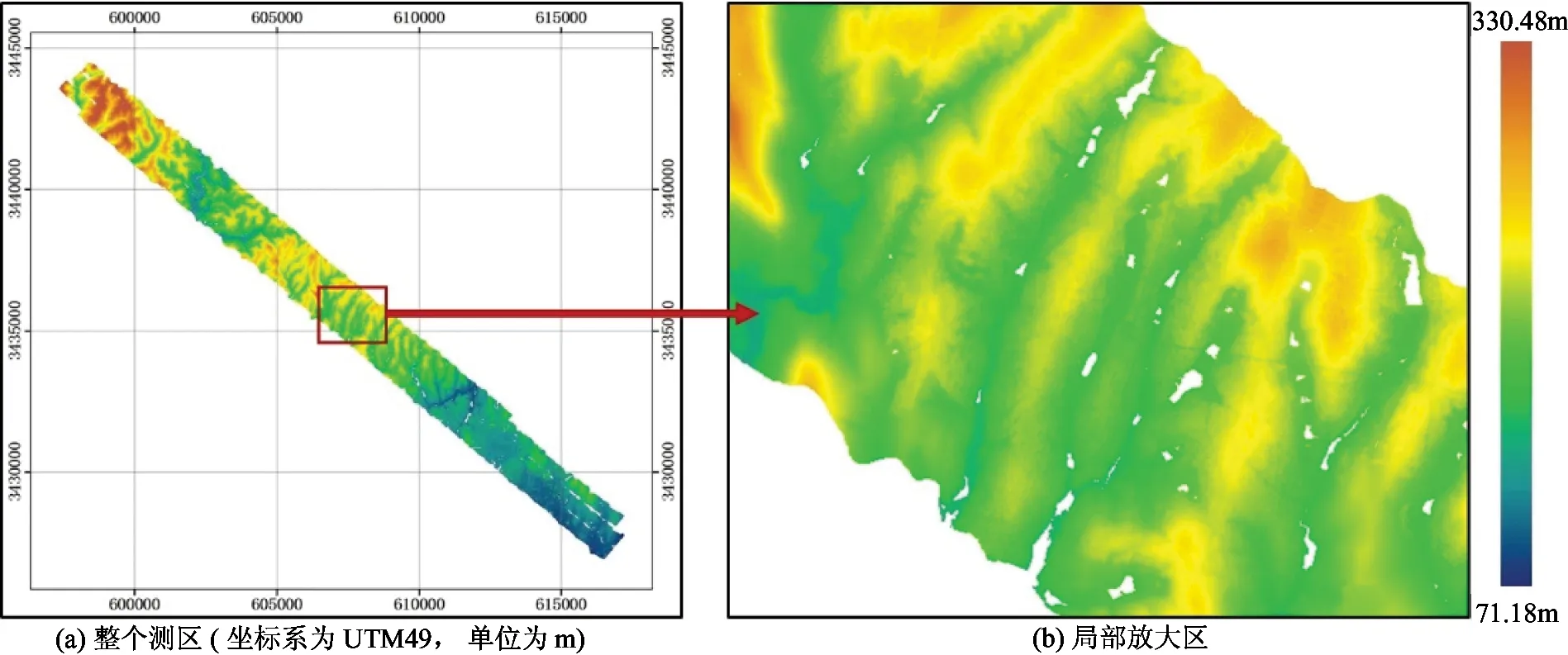
图4 点云高度分布图
1.4 高光谱数据
高光谱数据反映了不同地物的光谱特征信息,在理想光照条件下,高光谱成像仪能够采集270个波段信息,波段的中心波长标定见下式:
Y=327.52622+2.95375×x
(1)
光照条件对地物的光谱特征响应影响很大,当光照环境差时,波谱两端的噪声很大,影响高光谱数据的有效性。森林测区高光谱观测时间为2014年12月4日15时45分至16时51分,太阳高度较低,光照强度弱。选取森林区域高光谱数据进行分析发现,位于高光谱波谱两端数据存在严重的条带噪声,主要为波长小于420nm和大于920nm的波谱范围,这部分数据不能使用;波长420nm~430nm和900nm~920nm的波谱范围内,属于严重条带噪声过渡为轻度条带噪声区域,也不适合识别地物类型;波长430nm~520nm时,属于植被光谱强吸收波谱范围,不适合于识别森林类型;波长520nm~900nm时植被光谱特征显著,大部分波段能够用于识别森林类型。因此,实际采用的有效波段为140个,去除了噪声比较大的前30个波段和后100个波段。
高光谱数据空间分辨率为1.65m,像元值物理含义为辐照亮度,单位为W/(m2·μm·sr),高光谱数据彩色合成图像(R:859nm, G:649nm, B: 549nm)见图5。采用UTM-49带投影,其中(a)为测区彩色合成图像,(b)为局部放大图。

图5 高光谱彩色合成图
1.5 航空影像数据
航空影像数据的空间分辨率为0.13m,高于高光谱数据空间分辨率,能够提供更精细的植被空间分布特征,用于辅助不同地物的分类和验证。由于光照条件的变化,使得航片的内部光谱响应特征差异较大,特别是山体的光照面和背光面差异显著,试验区航空正射影像见图6。

图6 航空正射影像图
1.6 地面调查数据
地面调查需要根据不同森林类型和林龄布设样地,观测样地的单木因子和林分因子,单木因子包括胸径、树高、冠幅、枝下高等内容,林分因子包括郁闭度、叶面积指数(leaf area index, LAI)等内容;样地布设为15m半径圆形样地,样地中心点位置采用GPS进行定位,采用围尺测胸径大于4cm的样木,测高器或标杆测量树高和枝下高,皮尺测量树冠两个方向的冠幅,抬头法测量郁闭度,LAI-2200和HeimiView仪器测量LAI。样地测量因子统计结果见表2。

表2 测树因子基本统计量
2 方 法
2.1 激光雷达提取林分平均高
森林高度是森林冠层上表面与林下地形之间的高度,用于表征森林生长状况。激光雷达可以直接测量森林三维空间结构,通过计算树冠的空间特征变量来得到森林高度信息[24,25]。激光雷达数据处理过程可以划分为三部分。第一部分是对激光点云数据进行分类,分为地面点、植被点和非植被点三类;第二部分是根据地面点和植被点生成冠层高度模型(canopy height model,CHM);第三部分是对CHM进行处理,提取单木树高和冠幅信息,进而得到林分高度信息。
(1)点云分类
激光雷达点云数据包含了来自地面、森林、建筑物等其它地物的回波信息,根据回波点之间的空间位置关系,可以很好地识别来自不同地物的回波点。点云分类的主要步骤如下:首先,通过高度阈值法去除噪声点,设置高度阈值时,需要考虑地物回波点的最小高度值和最大高度值;然后,通过迭代建立三角网(triangular irregular network, TIN)表面模型提取地面点,迭代参数决定了距离三角形平面多近的点能够被模型接受,确保迭代时不会向上跳跃太大,将回波点分为地面点和非地面点;最后,对非地面点进行分类,采用手工编辑的方式去除建筑物等非植被点,按照距离地面高度的不同,可以提取低矮植被点、中等高度植被点和高植被点[26]。
(2)生成冠层高度模型(CHM)
CHM反映了整个森林冠层的高度变化,能够提供冠层的水平和垂直分布情况。由地面点采用TIN内插算法生成数字高程模型(digital elevation model, DEM),由植被点和地面点采用TIN内插算法生成植被覆盖区的数字表面模型(vegetation-digital surface model, V-DSM),由V-DSM和DEM相差得到CHM。
(3)提取林分平均高
冠层高度模型包含了单木树冠顶点、肩部和边缘的高度值。通过单木树冠顶点的位置,可以得到单木树高。判断树冠顶点位置时,假设树冠顶点高于树冠的其他区域,在CHM中使用局部最大值搜索窗口搜索潜在的树冠顶点。单木树高边界识别算法通过计算冠顶与其周围点之间的两个正切角作为识别树冠边缘的依据,由树冠边界计算得到冠幅面积[27,28]。按照一定统计单元由单木树冠识别结果得到林分平均高。
2.2 高光谱优势树种识别
森林试验区针叶林优势树种主要为马尾松,还有少量柏树等其它树种,阔叶林优势树种主要为栓皮栎,还有少量杨树等其它树种。通过高光谱图像识别的类型分为马尾松、栓皮栎、其它树种和非森林。高光谱数据预处理过程主要包括大气校正和数据降噪,大气校正采用暗像元进行数据处理[29],数据降噪采用独立成分分析法(independent component analysis, ICA)进行数据处理[30]。
(1)建立训练样本
高光谱数据分类时需要建立训练样本,根据地面样地调查的树种信息,结合高光谱彩色合成影像进行分析,建立优势树种光谱特征的经验知识。影像获取时马尾松针叶常绿,栓皮栎树叶已经枯黄,两种优势树种的光谱差异显著,采用目视判断建立训练样本。对于山体阴影区域,由于光照不足,同一树种的光谱差异较大,作为不同的树种建立训练样本,分类完成后进行类别合并。
(2)监督分类
建立训练样本之后,采用支持向量机(support vector machine,SVM)算法进行优势树种监督分类[30,31],核函数采用径向基函数(radial basis function, RBF),Gamma采用0.02,惩罚系数采用100,用于控制分类误差的容许程度,依次对各航带高光谱数据进行处理,最后合并分类结果。地面调查数据作为验证样本,参与分类精度评价。
3 结 果
3.1 林分平均高
激光雷达点云数据分类采用TerraSolid软件,将点云数据划分为1km×1km块,地面点搜索算法的窗口尺寸为30m。为了保证相邻块地面点的一致性,块缓冲区采用30m,逐块检查点云分类结果,手工去除错分的地面点,结合光学影像,目视判断识别来自低矮建筑物、高压线塔等人工地物的回波点。点云分类结果参见文献[26]。
通过LIDARInfo软件生成冠层高度模型(CHM)、提取单木信息和林分信息。CHM是连续分布的冠层上表面高度,空间分辨率为0.5m。CHM平均值3.19m,最小值为0m,最大值为28.32m。通过树冠特征识别算法提取单木树高和冠幅信息,去除树高小于2m的伪树冠顶点。林分平均高空间分辨率为30m,按照树冠顶点所在的栅格计算林分平均高,其平均值为9.01m,最小值为4.51m,最大值为22.25m。
森林高度的变化反映了不同区域森林垂直结构的差异性,由激光雷达得到的林分平均高空间分布如图7所示。较高的森林主要分布在山坡上,由于人为干扰,山谷区域主要为农田或低矮灌木。按照5m间隔,将森林高度划分为不同区间进行统计,发现5m~10m的树高所占比例最大(65.84%),10m~15m的树高所占比例次之(29.90%),15m~20m的树高所占比例很小(3.34%),5m以下和20m以上的树木很少。

图7 激光雷达林分平均高分布图
按照优势树种分类结果对提取的单木进行统计(见表3),发现马尾松株数所占比例为66.94%,其林分平均高为9.62m;栓皮栎株数所占比例为24.51%,其林分平均高为9.30m;其它树种株数所在比例为8.55%,其林分平均高为8.79m,不同树种之间的林分平均高相差不大。

表3 优势树种的树高统计量(树高单位为m)
通过地面调查样地数据计算得到样地平均高对激光雷达林分平均高进行验证。图8为地面实测平均高和LiDAR估测平均高散点图。由地面调查样地与激光雷达进行位置匹配发现,部分样地位置的误差较大,存在距离道路和林间空地较近的样地。按照样地周围林分较均一的筛选条件,选择50块样地进行精度验证,平均估测精度为90.67%。地面实测胸径加权平均高记为Hs,激光雷达估测平均高记为He,Hs和He回归分析的相关系数R2为0.73,均方根误差(root mean square error, RMSE)为1.29m。回归方程为

图8 地面实测平均高和LiDAR估测平均高散点图
Hs =2.833+0.8106He
(2)
3.2 优势树种分类
通过ENVI软件进行高光谱数据大气校正和SVM分类处理。高光谱优势树种分类结果如图9所示。森林主要分布在丘陵山区,非森林区域包括测区东南部的荆门市区以及山区内零散分布的村庄;测区森林面积所占比例为60.01%,非森林面积所占比例为39.99%,其中马尾松林面积占森林面积的59.77%,栓皮栎林面积占森林面积的24.99%,其它树种面积占森林面积的15.23%。

图9 试验区优势树种分类图
通过地面实测样地对分类结果进行了精度验证,总体精度可达82.0%(Kappa= 0.70),马尾松分类精度为88.0%,栓皮栎分类精度为78.95%,其它树种的分类精度为66.67%。
4 讨 论
4.1 森林高度影响因素
森林高度的影响因素包括点云定位误差、激光点采样密度、数据处理算法等。点云定位误差主要来源为激光扫描仪系统误差及航带匹配误差,其中激光扫描仪系统误差包括GPS定位误差、IMU姿态误差、激光时间记录误差、扫描角误差等,这部分误差通过检校场进行标定。激光点云数据预处理时,通过航带匹配算法可以尽可能地减小这部分误差。激光点采样密度引起的误差是影响森林高度的主要因素。点云数据扫描线之间的间隔呈现不规律变化,扫描线间隔主要在0.5m~1.5m范围内变化,扫描线内部点之间的间隔也不均匀,主要在0.1m~0.8m范围内变化,扫描线边缘点之间的间隔明显小于扫描线中间点之间的间隔,在重叠区范围内点云密度较高。不同数据处理算法对森林高度估测精度也有一定的影响。
4.2 优势树种分类影响因素
高光谱优势树种分类的影响因素为地物的光谱响应特征,由于地形起伏影响,山坡阳面的光照强度一般大于山坡阴面的光照强度,特别是在太阳高度角较低的情况下,这种差异更加显著。另外,山谷河流之上大气、村庄之上大气与山坡之上大气的气溶胶光学厚度具有非均匀性,均会导致地物的光谱特征差异变化。为了提高分类精度,采用增加训练样本类别的方式,将同种地物的不同光谱看作不同的类别,分类完成后进行类别合并,但是增加了分类工作量。
5 结 论
机载激光雷达和高光谱组合系统(ALHIS)由激光扫描仪、高光谱成像仪和航空相机三种传感器组成,是国内自主研发的多传感器集成航空系统,能够同时获取高空间分辨率的植被垂直结构、光谱特征观测数据,用于森林高度制图、优势树种/树种组制图、生物多样性分析、碳储量估算及植被生长研究等方面。
森林试验区结果表明激光雷达林分平均高的估测精度达到90.67%,激光雷达估测平均高与地面实测胸径加权平均高之间相关性显著(R2=0.73,RMSE=1.29m)。按照树高间隔进行分析,发现5m~10m的树高所在比例最大(65.84%),10m~15m的树高所在比例次之(29.90%),15m~20m的树高所在比例很小(3.34%),5m以下和20m以上的树木很少。按照优势树种分类结果进行统计,发现马尾松所林分平均高为9.62m,栓皮栎林分平均高为9.30m,其它树种林分平均高为8.79m,不同树种之间的林分平均高相差不大。高光谱优势树种识别总体精度达到82.00%(Kappa=0.70);试验区森林面积所占比例为60.01%,非森林面积所占比例为39.99%,马尾松占森林面积的59.77%,栓皮栎占森林面积的24.99%,其它树种占森林面积的15.23%。
多传感器集成航空系统可以采用不同的配置方案,满足于不同的行业应用需求,提供多种遥感数据产品,为现有卫星任务提供验证数据,提升遥感数据综合服务能力。
致谢:感谢湖北荆门亚热带森林航空试验与地面调查试验全体参加人员付出的辛苦劳动。
[1] Hese S, Lucht W, Schmullius C, et al. Global biomass mapping for an improved understanding of the CO2balance-the earth observation mission Carbon-3D.RemoteSensingofEnvironment, 2005, 94(1): 94-104
[2] Toan T L, Quegan S, Davidson M W J, et al. The BIOMASS mission: mapping global forest biomass to better understand the terrestrial carbon cycle.RemoteSensingofEnvironment, 2011, 115 (11): 2850-2860
[3] Chen Q. Modeling aboveground tree woody biomass using national-scale allometric methods and airborne lidar.IsprsJournalofPhotogrammetryandRemoteSensing, 2015, 106: 95-106
[4] Kokaly R F, Asner G P, Ollinger S V, et al. Characterizing canopy biochemistry from imaging spectroscopy and its application to ecosystem studies.RemoteSensingofEnvironment, 2009, 113: S78-S91
[5] Domke G M, Woodall C W, Smith J E, et al. Consequences of alternative tree-level biomass estimation procedures on US forest carbon stock estimates.ForestEcology&Management, 2012, 270(4): 108-116
[6] Asner G P, Mascaro J. Mapping tropical forest carbon: calibrating plot estimates to a simple LiDAR metric.RemoteSensingofEnvironment, 2014, 140: 614-624
[7] Lefsky M A, Harding D, Cohen W B, et al. Surface lidar remote sensing of basal area and biomass in deciduous forests of eastern Maryland, USA.RemoteSensingofEnvironment, 1999, 67(1): 83-98
[8] Naesset E. Predicting forest stand characteristics with airborne scanning laser using a practical two-stage procedure and field data.RemoteSensingofEnvironment, 2002, 80: 88-99
[9] Gleason C J, Im J. Forest biomass estimation from airborne LiDAR data using machine learning approaches.RemoteSensingofEnvironment, 2012, 125: 80-91
[10] Korhonen L, Korpela I, Heiskanen J, et al. Airborne discrete-return LIDAR data in the estimation of vertical canopy cover, angular canopy closure and leaf area index.RemoteSensingofEnvironment, 2011, 115: 1065-1080
[11] Parent J R, Volin J C. Assessing the potential for leaf-off LiDAR data to model canopy closure in temperate deciduous forests.IsprsJournalofPhotogrammetryandRemoteSensing, 2014, 95: 134-145
[12] Lu D. The potential and challenge of remote sensing-based biomass estimation.InternationalJournalofRemoteSensing, 2006, 27: 1297-1328
[13] Cho M A, Mathieu R, Asner G P, et al. Mapping tree species composition in South African savannas using an integrated airborne spectral and LiDAR System.RemoteSensingofEnvironment, 2012, 125: 214-226
[14] Dalponte M, Bruzzone L, Gianelle D. Tree species classification in the Southern Alps based on the fusion of very high geometrical resolution multispectral/hyperspectral images and LiDAR data.RemoteSensingofEnvironment, 2012, 123: 258-270
[15] Kampe T U, Brian R J, Michele K, et al. NEON: the first continental-scale ecological observatory with airborne remote sensing of vegetation canopy biochemistry and structure.JournalofAppliedRemoteSensing, 2010, 4(1): 043-510
[16] Asner G P, Knapp D E, Kennedy-Bowdoin T, et al. Carnegie airborne observatory: In-flight fusion of hyperspectral imaging and waveform light detection and ranging (wLiDAR) for three dimensional studies of ecosystems.JournalofAppliedRemoteSensing, 2007, 1: 013536
[17] Asner G P, Knapp D E, Boardman J, et al. Carnegie airborne observatory-2: Increasing science data dimensionality via high-fidelity multi-sensor fusion.RemoteSensingofEnvironment, 2012, 124: 454-465
[18] Cook B D, Corp L W, Nelson R F, et al. NASA goddard’s LiDAR, hyperspectral and thermal (G-LiHT) airborne imager.RemoteSensing, 2013, 5:4045-4066
[19] Korhonen L, Heiskanen J, Korpela I. Modeling lidar-derived boreal forest canopy cover with SPOT 4HRVIR data.InternationalJournalofRemoteSensing, 2013, 34: 8172-8181
[20] Ahmed O S, Franklin S E, Wulder M A, et al. Characterizing stand-level forest canopy cover and height using Landsat time series, samples of airborne LiDAR, and the random forest algorithm.IsprsJournalofPhotogrammetryandRemoteSensing, 2015, 101: 89-101
[21] Pu R, Gong P. Wavelet transform applied to EO-1 hyperspectral data for forest LAI and crown closure mapping.RemoteSensingofEnvironment, 2004, 91: 212-224
[22] Vanhatalo K M, Rautiainen M, Stenberg P. Monitoring the broadleaf fraction and canopy cover of boreal forests using spectral invariants.JournalofQuantitativeSpectroscopyandRadiativeTransfer, 2014, 133, 482-488
[23] Pang Y, Li Z Y, Ju H B, et al. LiCHy: CAF′s LiDAR, CCD and hyperspectral airborne observation system. In: Proceedings of the 13th International Conference on Lidar Applications for Assessing Forest Ecosystems, Beijing, China, 2013. 45-54
[24] Liu Q W, Li Z Y, Chen E X, et al. Feature analysis of LIDAR waveforms from forest canopies.ScienceChinaEarthScience, 2011, 54(8): 1206-1214
[25] Chen Q, Laurin G V, Battles J J, et al. Integration of airborne LiDAR and vegetation types derived from aerial photography for mapping aboveground live biomass.RemoteSensingofEnvironment, 2012, 121: 108-117
[26] Liu Q W, Li Z Y, Pang Y, et al. Optimized process chain for mountainous forest and non-forest classification using airborne LiDAR data. In: Proceedings of the 14th International Conference on Lidar Applications for Assessing Forest Ecosystems, La Grande-Motte, France, 2015. 260-264
[27] 刘清旺,李增元,陈尔学等. 利用机载激光雷达数据提取单株木树高和树冠. 北京林业大学学报, 2008,30(6): 83-89
[28] 刘清旺,李增元,陈尔学等. 机载LIDAR点云数据估测单株木生物量. 高技术通讯, 2010,20(7):765-770
[29] 郑求根,权文婷. 基于暗像元的Hyperion高光谱影像大气校正. 光谱学与光谱分析, 2010(10): 2710-2713
[30] 梁亮,杨敏华,李英芳. 基于ICA与SVM算法的高光谱遥感影像分类. 光谱学与光谱分析, 30(10): 2724-2728
[31] 谭琨,杜培军. 基于支持向量机的高光谱遥感图像分类. 红外与毫米波学报, 2008,27(2): 123-128
The remote sensing experiment on airborne LiDAR and hyperspectral integrated system for subtropical forest estimation
Liu Qingwang*, Tan Bingxiang*, Hu Kailong***, Fan Xue*, Li Zengyuan*, Pang yong*, Li Shiming*
(*State Laboratory for Forest Remote Sensing and Information Techniques, Research Institute of Forest Resource Information Techniques, Chinese Academy of Forestry, Beijing 100091)(**College of Geoscience and Surveying Engineering, China University of Mining & Technology, Beijing 100083)
To improve the accuracy of forest’s type extraction and biophysical parameters inversion, an aviation experiment on the typical subtropical forest area in Hubei was conducted by using the Airborne Light detection and ranging and Hyperspectral Integrated System (ALHIS), and acquired the point cloud data and the hyperspectral and CCD (Charge Couple Device) images.The forest heights were extracted and the dominate tree species were identified by using these data. The estimation accuracy of average height reached 90.67% at stand level. The correlation between the average height estimated by using the light detection and ranging (LiDAR) and the average height of field measurements weighted by DBH (diameter at breast height) was significant (R2=0.73,RMSE=1.29m). According to the dominant tree species classification, the average heights ofPinusmassonianaLamb.,QuercusvariabilisBl. and other species were 9.62m, 9.30m and 8.79m, respectively. The variation between different species was not significant. The classification accuracy of dominant tree species using hyperspectual image was 82.00% (Kappa=0.70). The proportions of the forest area and the non-forest area were 60.01% and 39.99% respectively. The proportions of the areas ofPinusmassonianaLamb.,QuercusvariabilisBl. and other species were 59.77%, 24.99% and 15.23%, respectively. The experiment shows that the ALHIS can acquire high resolution remote sensing data describing vegetation characteristics for forest mapping, dominant tree species / group species recognition, carbon estimation, ecological environment modeling, etc.
forest height, dominant tree species, light detection and ranging (LiDAR), hyperspectual, classification
10.3772/j.issn.1002-0470.2016.03.006
①863计划(2013AA12A302),国家自然科学基金(41201334)和国家科技支撑计划(2012BAH34B02)资助项目。
2015-11-26)
②男,1978年生,博士;研究方向:林业遥感,激光雷达技术;联系人,E-mail: liuqw@ifrit.ac.cn(
猜你喜欢
林业资源管理(2022年6期)2023-01-18
北京测绘(2022年5期)2022-11-22
现代园艺(2021年23期)2021-12-01
汽车观察(2021年8期)2021-09-01
林业勘查设计(2020年1期)2021-01-18
新农业(2020年18期)2021-01-07
商周刊(2019年19期)2019-10-17
中国交通信息化(2019年1期)2019-03-26
今日农业(2019年10期)2019-01-04
电子制作(2018年16期)2018-09-26
