
IFSTA自主着舰控制律仿真研究
2016-12-21 02:24华艺欣王海平曹良秋
飞行力学 2016年6期
华艺欣, 王海平, 曹良秋
(1.中国飞行试验研究院 飞机所, 陕西 西安 710089;2.中国飞行试验研究院 科技部, 陕西 西安 710089)
IFSTA自主着舰控制律仿真研究
华艺欣1, 王海平1, 曹良秋2
(1.中国飞行试验研究院 飞机所, 陕西 西安 710089;2.中国飞行试验研究院 科技部, 陕西 西安 710089)
针对舰载机的自动着舰系统,以IFSTA原型机K8飞机为研究对象建立了着舰环境模型,设计了自动着舰控制律,对在着舰阶段的控制作用及影响着舰精度的因素进行了分析和研究,并分别进行了数值仿真和半实物地面仿真验证。研究结果表明,为了使飞机成功完成着舰任务,需满足海况、大气扰动、控制系统带宽频率的最低要求。
IFSTA; 自动着舰系统; 推力补偿控制; 半实物地面仿真
0 引言
舰载机着舰过程中,飞行员需要承受极高的身体负荷和心理负担,因此舰载机技术发展的重要方向是研究自动着舰控制技术。随着以X-47B飞机为代表的舰载无人机的成功着舰,标志着国外在此领域取得了重大技术进步。对于固定翼飞机而言,进近着舰是一项极具挑战性的任务,需要克服诸多影响因素,例如近舰区气流扰动、海况引起的航母甲板运动、飞机本体操纵性与稳定性,以及自动着舰控制系统的性能和精度等。
本文以中型固定翼飞机K8为研究对象,建立了包括飞机动力学模型、自动着舰控制律、航母运动模型及舰尾流模型在内的自动着舰仿真环境,并在铁鸟台上进行了半实物仿真研究,分析了各要素单元对飞机实现安全、准确、迅速着舰的影响,为我国今后开展相关演示验证飞行奠定了重要的研究基础。
1 自动着舰过程
1.1 下滑航迹
与陆基飞机着陆不同,舰载机着舰下滑不经过平飘,而是沿一特定轨道进行带动力匀速直线下滑。假设飞机距舰尾水平距离约3 000 m时进入雷达截获窗。飞机进入基准下滑轨迹的前3 s加入俯仰指令,轨迹示意如图1所示。其中,ACLS为自动着舰系统;DMC为甲板运动补偿系统;DTP为理想触舰点。
根据文献[1]仿真得到6级海况下基准下滑轨迹如图2所示。由仿真结果可见,由于航母运动的加入,基准下滑轨迹并不是一条直线,这种起伏是由海况引起的。

图2 基准下滑轨迹仿真结果Fig.2 Simulation result of ideal longitudinal glide slope
飞机在近舰段最大误差来源是舰尾气流对飞机的扰动。文献[2]中当飞机进场离舰最后约800 m时,仿真得到总的舰尾流扰动分量uw,vw,ww在时域中的曲线如图3所示。图中:uw为水平气流,顺风为正;vw为侧向气流,向右为正;ww为垂直气流,向下为正。
航母的甲板运动幅值和频率直接与海况有关。本文使用不同频率、不同相位的正弦函数来模拟航母在海洋中的运动[1-2]。在6级海况下建立航母运动模型,仿真结果如图4所示。图中,θc,φc,ψc分别
为航母在体轴系下的纵摇、横摇和偏航角;Y为起伏运动幅度。

图3 舰尾流各分量仿真曲线Fig.3 Simulation results of all components of the airwake

图4 航母运动姿态仿真结果Fig.4 Simulation results of all carrier moving attitudes
1.2 自动着舰飞控系统设计要求
大多数着舰事故是由于纵向航迹控制不好造成的,所以本文重点研究纵向飞行控制特性[3]。自动着舰纵向控制系统是由自动飞行控制和推力补偿系统组成[4],总的结构图如图5所示。

图5 自动着舰控制系统结构图Fig.5 Structure of automatic carrier landing control system
2 自动着舰控制系统设计与半实物地面仿真
自动着舰控制系统采用经典PID控制方法,通过调节比例、积分增益(kI,kP)自内而外进行不同层级控制系统的设计。选择K8飞机作为研究对象,采用俄式坐标系下的六自由度方程描述其运动特性。选取基准运动:进舰速度V=190 km/h, 高度H=250 m, 迎角α=10°。由纵向小扰动方程计算得到纵向状态方程4个特征值:
λ1,2=-0.676±1.09i,λ3,4=-0.008 6±0.227i
短周期模态:ωn1=1.28 rad/s,ζn1=0.527
长周期模态:ωn1=0.228 rad/s,ζn1=0.037 8
通过图5中控制系统内环增稳设计,系统的频率、阻尼比及主导极点列表如表1所示。由表可知,加增稳控制后,系统的频率和阻尼比都有明显增大,主导极点更加远离虚轴,说明飞机的固有特性得到改善。
表1 增稳前后系统的动态性能指标
Table 1 Dynamic performance indicator before and after augmentation
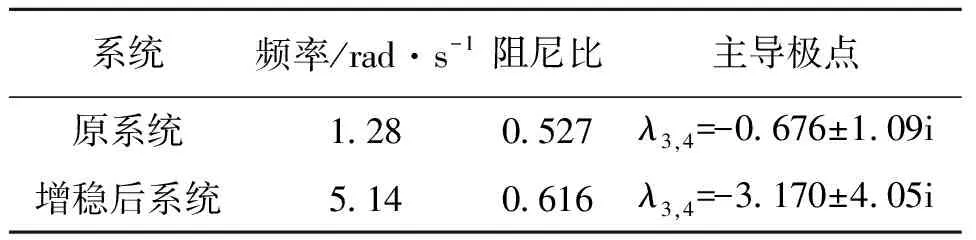
系统频率/rad·s-1阻尼比主导极点原系统1280527λ3,4=-0676±109i增稳后系统5140616λ3,4=-3170±405i
着舰过程中舰载机飞行速度变化较小,图5中外环的高度控制就相当于对航迹角的控制,这与一般的俯仰角指令反馈相比,具有更好的抗扰动能力,对于克服下滑道中舰尾流更加有利[5-6]。自动推力
补偿系统作为舰载机自动着舰控制的关键技术,是为解决舰载机低速着舰过程中速度不稳定而提出的。采用图5中速度反馈主要目的是通过油门控制来保持舰载机的空速和迎角。加推力补偿控制前后的速度和迎角响应如图6所示。对比可见,加入推力补偿控制后,速度和迎角的稳定性大大增强[7]。
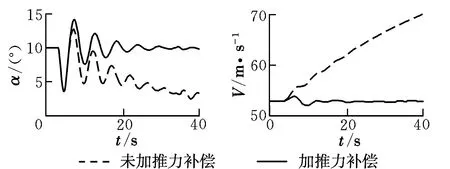
图6 加推力补偿前后迎角和速度响应Fig.6 Responses of angle of attack and velocity before and after adding power compensation control
为了验证所设计的自动着舰控制律的正确性,还开展了半实物地面仿真试验。半实物地面仿真试验以现有的某试验台为基础,增加舰载机关键舵面的控制舵机及其加载系统,其余舵面控制采用计算机模拟方式实现,运行环境如图7所示。半实物仿真得到的仿真结果如图8所示。

图7 地面试验台运行环境Fig.7 Operating environment of ground test bed

图8 半实物地面仿真结果Fig.8 Results of semi-physical ground simulation
由以上仿真结果可见,数值仿真的着舰误差约为2.5 m,半实物仿真的着舰误差约为3 m,均小于ACLS着舰误差范围±6.1 m。此外,半实物仿真环境下飞机实际下滑轨迹与理想下滑轨迹的高度误差与Matlab数值仿真结果基本一致。这说明,尽管有真实舵机和加载系统的加入,存在时间延迟和采集误差,仍然认为所设计的控制律在半实物地面试验台环境下的控制效果较好。
3 仿真结果及分析
3.1 海况影响
参考航母运动方程求解过程(略),仿真求解2级、6级和9级海况下自动着舰触舰点的纵向水平偏差分别为:1.5 m,2.5 m和6.5 m。
根据着舰点纵向理想水平偏差±6 m以内的要求可知,本文设计的控制律对于2级海况和6级海况来说是可以安全、准确地着舰。
3.2 不同控制律带宽频率与控制精度的关系
带宽准则作为舰载机飞行品质判据的基础[8-9],在上述半实物着舰环境模型下,本文进一步设计了3套控制律,分别研究带宽频率与控制精度之间的关系。Bode图如图9所示。

图9 不同增益控制律下的Bode图对比Fig.9 Bode plot comparison at different control laws
在同等海况和舰尾流强度下,将3种控制律的下滑轨迹(yda,ydb,ydc)与理想下滑轨迹(Hc)进行了比较(见图10),并根据上述带宽频率定义对3种控制律带宽进行了计算,计算结果如表2所示。

图10 不同控制律下滑轨迹与理想下滑轨迹Fig.10 Actual and ideal glide slope at different control laws
Table 2 Results of control accuracy and band frequency
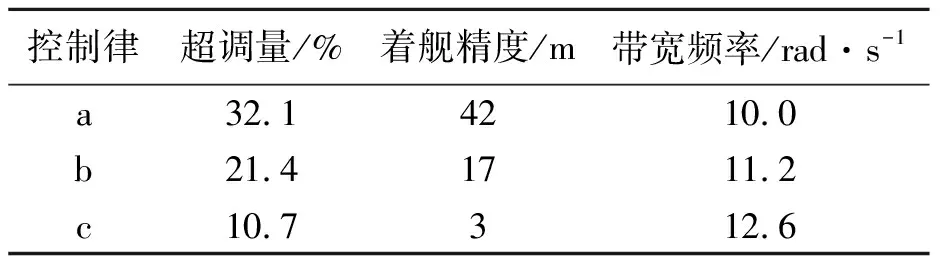
控制律超调量/%着舰精度/m带宽频率/rad·s-1a32142100b21417112c1073126
综上可知,在同等海况和舰尾流强度下,带宽频率越高的控制系统跟踪精度越好,根据带宽频率和着舰精度还可以选择一套最优的自动着舰控制律。
4 结论
本文以自动着舰控制理论为基础,分别建立了飞机、航母和舰尾流模型。以理想下滑轨迹为基准进行控制律设计,分析影响着舰精度的因素,并分别进行了数值仿真和半实物地面仿真验证。得出以下结论:(1)半实物地面仿真的着舰误差为3 m,由于加入了真实的舵机及其加载系统,着舰误差仍满足要求,这说明设计的自动着舰控制系统具有较强的工程实际应用价值;(2)自动着舰控制律是完成精确定点着舰的关键因素,自动着舰控制系统必须达到12.6 rad/s的带宽频率,才可以满足理想着舰精度的安全要求;(3)海况影响航母的六自由度运动,直接增加了着舰难度。研究表明,6级以下海况均可满足理想着舰的安全要求。
[1] 杨一栋,余俊雅.舰载机着舰引导与控制[M].北京:国防工业出版社,2007:116-121.
[2] 张明廉,徐军.舰载飞机自动着舰系统的研究[J].北京航空航天大学学报,1994,20(4):386-391.
[3] 周自全,张子彦.飞行品质和飞行安全[J].飞行力学,2009,27(2):1-6.
[4] 刘兴堂,吕杰,周自全.空中飞行模拟器[M].北京:国防工业出版社,2003:29-55.
[5] 罗先震,金长江.舰载飞机着舰下滑轨迹控制和分析[J].飞行力学,1993,11(3):31-41.
[6] 李卉.舰载机自动着舰控制系统研究与设计[D].哈尔滨:哈尔滨工程大学,2009.
[7] Boskovic J,Redding J.An autonomous carrier landing system for unmannned aerial vehicles[R].AIAA-2009-6264,2009.
[8] Lizarraga M I.Autonomous landing system for a UAV [D].California:B.S.Naval Sciences Engineering,Mexican Naval Academy,1995.
[9] 李建平.飞控系统稳定裕度试飞技术[C]∥中国航空学会控制与应用第九届学术年会.成都:中国航空学会,2000.
(编辑:方春玲)
Research of automatic carrier landing control law simulation by IFSTA
HUA Yi-xin1, WANG Hai-ping1, CAO Liang-qiu2
(1.Aircraft Flight Test Technology Institute, CFTE, Xi’an 710089, China; 2.Ministry of Science and Technology, CFTE, Xi’an 710089, China)
In this paper, automatic carrier landing system of carrier-based aircraft is introduced. Model of landing circumstance is established which is based on the prototype model of IFSTA-K8, and auto landing control law is designed. Control effect during landing process and factors which influence landing precision are studied. At last, numerical simulation and semi-physical ground simulation are both performed. These results demonstrate that in order to land on board successfully, the minimum requirements of sea condition, atmospheric disturbance and control system band frequency should be met.
IFSTA; automatic carrier landing system; power compensation control; semi-physical ground simulation
2016-03-15;
2016-08-31;
时间:2016-09-22 14:55
华艺欣(1988-),女,陕西宝鸡人,硕士研究生,研究方向为飞行控制与飞行仿真。
V249.1
A
1002-0853(2016)06-0030-04
猜你喜欢
中学生数理化·中考版(2022年10期)2022-11-10
装备制造技术(2020年3期)2020-12-25
作文小学中年级(2018年10期)2018-10-29
电子制作(2018年1期)2018-04-04
雷达学报(2017年6期)2017-03-26
湖南农业(2016年3期)2016-06-05
船海工程(2015年4期)2016-01-05
天津大学学报(自然科学与工程技术版)(2015年10期)2015-12-29
应用海洋学学报(2015年3期)2015-11-22
舰船科学技术(2015年8期)2015-02-27
