
自走式茶园微耕机的设计
2016-12-22 06:23王小勇徐成刚李尚庆孙长应
安徽农业科学 2016年33期
王小勇,李 兵*,徐成刚,李尚庆,孙长应
(1.安徽农业大学工学院,安徽合肥 230031;2.安徽农业大学茶树生物学与资源利用国家重点实验室,安徽合肥 230031;3.安徽农业大学茶与食品科技学院,安徽合肥 230031)
(9)
自走式茶园微耕机的设计
王小勇1,2,李 兵1,2*,徐成刚1,2,李尚庆2,3,孙长应2,3
(1.安徽农业大学工学院,安徽合肥 230031;2.安徽农业大学茶树生物学与资源利用国家重点实验室,安徽合肥 230031;3.安徽农业大学茶与食品科技学院,安徽合肥 230031)
茶园的除草、碎土是茶园管理的重要环节,传统的除草碎土方式都是人工操作,作业效率低,劳动强度大。为了提高茶园的除草碎土效率,设计制造一种自走式茶园微耕机,使用ansys软件对刀片和刀轴进行静力学分析,得出刀片刀轴的最大应力与最大应变的位置。最后对微耕机进行性能实验,结果表明,该微耕机耕作幅宽365 mm,耕作深度118 mm,稳定性系数达91.6%,能够有效满足茶园耕作的需求并保证工作的稳定性。
微耕机;力学分析;茶园
茶叶含有大量对人体有益的有机化学成分和无机矿物元素,营养价值和药用价值较高,社会需求量不断增大。在茶树的种植和管理过程中,杂草的存在不仅吸收茶园的养分,还为害虫的生长提供场所,因此在茶树生长过程中必须进行除草碎土。传统的除草碎土方式主要以人工除草为主,该方式劳动强度大,作业效率低[1-2],利用机械除草碎土能够提高作业效率,并且利于茶树生长,因此机械化除草碎土在茶园生产中得到大力推广[3]。由于茶园种植模式的限制,普通的茶园管理机械因体积、重量的影响,无法在山区作业。笔者结合茶园管理除草碎土作业的农艺技术要求、茶园种植的行距要求以及方便操作者使用等,设计了一款自走式茶园微耕机,并进行了实地验证,效果较好。
1 总体结构设计
1.1 工作原理 自走式茶园微耕机主要由机架、发动机、操作架、限深调节装置、传动系统和旋耕刀辊组成,如图1所示。动力的传递主要通过发动机产生,由带传动将动力传递到旋耕刀,中间由齿轮箱实现变速调节;旋耕刀等间距地安装在刀轴上,在不作业的情况下可以更换驱动轮,便于行走;操作架可以根据操作者的身高实行调节,限深装置通过限深轮的高度控制微耕机的耕作深度以及微耕机在工作过程中的阻力[4-5]。通过三维软件catia建立自走式茶园微耕机的三维模型,如图2所示。

注:1.机架;2.柴油机;3.操作架;4.限深调节装置;5.刀轴变速箱;6.旋耕刀辊。Note:1.Frame;2.Diesel emgine;3.Handling frame;4.Depth regulating device;5.Arbor gearbox;6.Rotary tillage knife roller.图1 自走式茶园微耕机结构示意Fig.1 Structure of tea garden self-propelled tiller

图2 茶园微耕机装配体模型Fig.2 Assembly model of tea garden tiller
1.2 技术参数 结合安徽省六安市独山茶园的种植模式和农业机械设计手册标准,设计自走式茶园微耕机的技术参数,如表1所示。

表1 自走式茶园微耕机主要技术参数
2 力学分析
2.1 自走式茶园微耕机整机受力分析 自走式茶园微耕机在工作时,刀片在切削土壤的过程中会产生推动机器前进的动力,土壤又会对刀片产生阻力,阻力的大小对机器的寿命有至关重要的作用。刀片的安装方式、操作者的操作水平、刀片的旋转,以及土壤的坚实度、硬度都会影响微耕机工作的切削阻力。如图3所示,G为茶园微耕机的重力,ω为刀轴旋转的角速度,P为茶园微耕机操作者施加的力,Vm为微耕机前进的速度,FX、FY为旋耕刀受到的阻力的分力,RX、RY为限深轮受到阻力的分力[6]。

图3 微耕机整机受力简图Fig.3 Stress of the whole machine
根据受力平衡原则:
FX-RX=0
(1)
FY+RY-G-P=0
(2)
FYXA+FXYA-GXC+PXD-RYXB-RXYB=0
(3)
根据公式(1)、(2)、(3),可以得出,通过操作者施加的压力来调节耕深,耕深过大时,增加操作者施加的压力来改变阻力,从而使耕深降低;同理,当耕深降低时,降低操作者施加的压力来改变阻力,使耕深增加。
2.2 耕刀与刀轴的受力分析 根据微耕机刀片在工作过程中不断重复地与土壤进行接触,位置、方向、面积以及作用点都在发生变化,因此简化耕刀的受力过程,如图4所示[7]。

图4 刀片受力简图Fig.4 Stress of blade

(4)
(5)
将阻力F沿作用点的法线、切线方向分解后得到法向的Fn和切向的Ft,从而
(6)
(7)
此时,在刀辊的旋转中心位置由于Ft的作用产生一阻力矩M,其大小为:
M=Ft·R
(8)
式中,R为力F的作用点到旋转中心的距离。
刀轴在工作的过程中会发生弯曲以及扭转,刀轴上面均匀安装刀片,以刀片的排列来确定受力的方向,结合图5可以得到如下方程:


图5 刀轴受力简图Fig.5 Stress of blade carrying axle
2.3 耕刀与刀轴的有限元分析 在三维软件下建立刀片与刀轴的三维模型,将模型导入ansys软件,对刀轴与刀片进行网格划分,建立有限元分析模型。刀片材料选用65Mn钢,刀轴材料选用结构钢,结合微耕机工作原理,在刀片侧切刃、正切刃以及过渡方向上分别施加450 N的力,对刀轴模型简化右端固定,左端约束的模型,在中间部位施加400 N的力,最后进行求解。刀片结果如图6~8所示:刀片正切刃部分发生最大变形,最小变形发生在刀柄处;最大应力发生在刀柄与刀背连接处,最小应力发生在正切刃与刀柄部位。刀轴结果如图9~11所示:刀轴受到应力最大位置在中间部位,中部为载荷集中部位,应力由中间向两边递减,到达两边约束位置变化最小[8-10]。

图6 刀片变形分析结果Fig.6 Blade deformation analysis results

图7 刀片应力分析结果Fig.7 Blade stress analysis results

图8 刀片应变分析结果Fig.8 Blade strain analysis results

图9 刀轴变形分析结果Fig.9 Arbor deformation analysis results

图10 刀轴应力分析结果Fig.10 Arbor stress analysis results
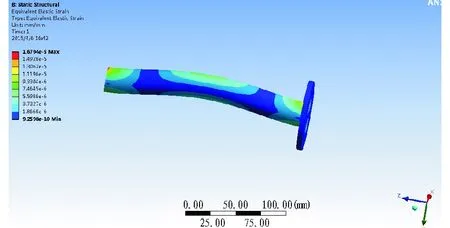
图11 刀轴应变分析结果Fig.11 Arbor stress analysis results
3 实例分析
该微耕机在耕深调节装置的控制下可以实现深度的调节,深度越深,能量的损耗也会增大[11]。根据茶园的种植特点,为了使微耕机在作业过程中能够灵活转弯的同时减少在作业时能量的消耗,使用微耕机对茶园来回4次作业,满足耕作深度要求,选择了柴油机作为动力源,同时在六安独山茶园进行了实验,茶园土壤的相对湿度为22.1%,平均土壤坚实度为834 kPa[12]。实验主要设备有:土壤坚实度测定仪,电子天平,电子秒表,卷尺和钢尺。20 min完成了满足旋耕深度的茶地大约100 m,在100 m内随机取10个点,茶园微耕机的耕作深度110~130 mm为合格,人工扒开土层测量微耕机的耕作深度,100个取样点中有89个合格,工作后合格率为89%[13-16],实验数据如表2所示。微耕机的平均耕作深度为:
(9)
式中,xi为每个取样点的耕作深度(mm);n为取样点的总数。
实验结果:微耕机在茶园工作的过程中,工作平稳可靠,实验测得相关数据如表3所示。由此可知,采用自走式茶园微耕机对茶园进行除草碎土,耕深耕宽都达到了茶园规定的范围,工作后茶园地表较平整,碎土除草效果好,刀轴的转速能够满足设计的相关要求。
4 结论
该研究所设计的茶园微耕机结构简单,便于操作,耕深与耕宽满足茶园碎土除草作业要求并且符合农艺要求,降低了操作者的工作强度并且提高了作业效率。

表2 茶园微耕机耕作深度

表3 实验测试结果
实验结果表明,自走式茶园微耕机平均耕深为118 mm,平均耕宽为365 mm,稳定性系数达91.6%,能够有效满足茶园耕作的需求和保证工作的稳定性。了操作者的工作强度并且提高了作业效率。
[1] 时玲,张海东,翟兆斌,等.我国微耕机技术现状与发展方向[J].农机化研究,2004(5):1-3.
[2] 张铁民,闫国琦,温利利,等.我国电动力农业机械发展现状与趋势[J].农机化研究,2012(4):236-240.
[3] 朱留宪,杨玲,杨明金,等.我国微型耕耘机的技术现状及发展[J].农机化研究,2011,33(7):236-239.
[4] 王小勇,李兵,李尚庆,等.茶园微耕机的设计分析[J].农机化研究,2016,38(1):101-105.
[5] 徐成刚,李兵,李尚庆,等.便携式茶园微耕机的设计研究[J].农机化研究,2016,38(5):107-111.
[6] 徐良.茶园中耕机械杂草缠绕力计算与分析[J].茶叶科学,2014,34(4):396-400.
[7] 曾晨,李兵,李尚庆,等.1WG-6.3型微耕机的设计与实验研究[J].农机化研究,2016,38(1):132-137.
[8] 高玉芝,王君玲,雷晓柱.基于Solidworks的旋耕刀实体建模与有限元分析[J].农业机械,2010(5):136-137.
[9] 葛云,吴雪飞,王磊,等.基于ANSYS微型旋耕机旋耕弯刀的应力仿真[J].石河子大学学报(自然科学版),2007,25(5):627-629.
[10] 朱留宪,杨玲,朱超,等.基于ANSYS Workbench的微耕机旋耕刀有限元分析[J].机械研究与应用,2014,27(1):88-89.
[11] 夏晓东,吴崇友,张瑞林,等.加大耕深型正转旋耕机研究设计初探[J].农业工程学报,1995,15(1):69-72.
[12] 南京农业机械化科学研究院.旋耕机械 实验方法:GB/T 5668.3—1995[S].北京:中国标准出版社,1996.
[13] 李兵,王继先,张健美,等.GBSL-180型双轴式旋耕灭茬播种机设计[J].农业机械学报,2008,39(3):180-182.
[14] 张毅.1WG-4型多用微耕机的研制与实验[J].中国农机化,2003(5):41-43.
[15] 全国农业机械标准化技术委员会.微型耕耘机 技术条件:JB/T 10266.1—2001[S].北京:机械工业出版社,2004.
[16] 李宝筏.农业机械学[M].北京:中国农业出版社,2003.
Design of Tea Garden Self-propelled Tillers
WANG Xiao-yong1,2, LI Bing1,2*, XU Cheng-gang1,2et al
(1. Engineering College, Anhui Agricultural University, Hefei, Anhui 230031; 2. State Key Laboratory of Tea Plant Biology and Utilization, Anhui Agricultural University, Hefei, Anhui 230031)
Tea garden weeding, pulverizer is an important part of tea garden management, the traditional way of weeding and pulverizer is manually, low operating efficiency, labor-intensive. In order to improve the efficiency of weeding and pulverizer, a self-propelled tea garden tiller was designed and manufactured, ansys software was used to deal with blade and arbor statics, the position of the maximum stress and the maximum strain in the blade arbor was obtained. Finally tiller performance test results showed that: the tillers tillage width 365 mm, tillage depth of 118 mm, stability factor reached 91.6%, effectively met the needs of tea cultivation and guarantee the stability of work.
Tiller; Mechanical analysis; Tea garden
农业部茶园机械科研项目(11008702);安徽农业大学研究生创新基金项目(2015-43)。
王小勇(1992- ),男,安徽黄山人,硕士研究生,研究方向:茶叶机械。*通讯作者,副教授,博士,从事农业机械、茶叶机械研究。
2016-10-12
S 224
A
0517-6611(2016)33-0239-04
猜你喜欢
农业机械学报(2023年8期)2023-08-22
湖北农机化(2021年14期)2021-12-07
甘肃农业大学学报(2021年6期)2021-02-24
机械设计与制造(2020年12期)2020-12-25
新农民(2020年34期)2020-12-17
凿岩机械气动工具(2019年2期)2019-06-24
科技与创新(2019年3期)2019-02-19
机械设计与制造(2018年7期)2018-07-19
干旱地区农业研究(2017年4期)2017-08-16
四川农业与农机(2017年1期)2017-04-17
