叉车液力传动与机械传动的对比设计
2016-12-29 02:10刘亚倩陶元芳冯志远
太原科技大学学报 2016年6期
刘亚倩,陶元芳,冯志远
(太原科技大学机械工程学院 太原 030024)
叉车液力传动与机械传动的对比设计
刘亚倩,陶元芳,冯志远
(太原科技大学机械工程学院 太原 030024)
液力传动因具有自动变速、操作方便等优点而受到人们的青睐。但是,由于液力变矩器的特性比较复杂,使得设计者在设计液力传动系统时比较困难。其实,当叉车爬最大坡度时液力变矩器处于最大力矩比状态附近,能够获得3左右的转矩比;而当叉车以最高速度行驶时液力变矩器处于耦合器状态,速比接近于1,通过对这两种状态的分析可以简化液力传动的设计过程。通过与机械传动系统设计的对比给出了液力传动系统的设计计算过程,概念清楚,计算简单。
液力传动;机械传动;设计计算
随着叉车使用量的不断增长,人们对叉车的要求也越来越高。机械传动系统的叉车操作非常繁重,对驾驶员的技术要求也很高,若不能及时换挡,发动机会憋熄火、冒黑烟,污染环境,同时增高油耗[1]。相较于机械传动系统叉车而言,液力传动的叉车具有显著的优点:(1)液力传动叉车能够自适应道路阻力变化,低速大牵引力,加速快,能自动调速[2];(2)具有缓冲、减震的特点,有利于提高车辆传动系统各零部件的使用寿命;(3)可以实现无极变速,减少了变速箱档位和换挡次数;(4)能使车辆平稳起步,防止内燃发动机意外熄火,同时可以改善车辆的微动性能。
1 液力变矩器
液力变矩器是以液力传动油作为工作介质的液力传动机械,利用油液动量矩的变化实现扭矩转换和传递。使用液力变矩器,可以实现发动机轻载启动,有效隔离和吸收来自发动机和传动系统的振动,实现柔性传动;它能够使车辆根据负载和道路阻力的大小,自动调整行驶速度和牵引力,实现无级变速,提高通过性能,减少换档次数,改善驾乘的舒适性,并能提高发动机和传动系统零部件的使用寿命。
1.1 液力变矩器的外特性 (输出特性)
液力变矩器外特性指的是在泵轮转速np一定时,泵轮转矩Mp、涡轮转矩MT及液力变矩器的效率η随涡轮转速nT的变化规律[1],如图1:
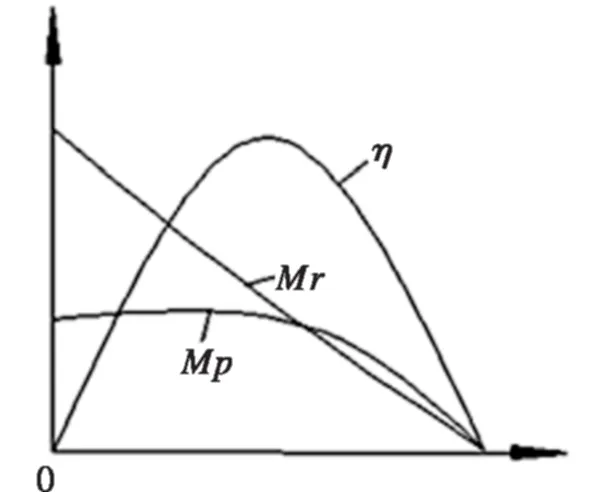
图1 液力变矩器外特性曲线
Fig.1 The external characteristic curve of hydraulic torque converter
由图1可以看出:1)随着液力变矩器涡轮转速的变化,泵轮转矩基本不变,这表明液力变矩器具有隔离功能;2)随着涡轮转速的变化,涡轮转矩由零速工况的最大转矩逐渐减小到耦合器工况的0.这体现了液力变矩器具有自动变矩功能;3)液力变矩器在零速工况和液力耦合器工况的效率均为0.因为在在零速工况下转矩最大但是转速为零,所以液力变矩器的效率为0;而在耦合工况下转速最大但是转矩为0,所以液力变矩器的效率也是0.
1.2 液力变矩器的输入特性和透穿性
液力变矩器的输入特性是指泵轮转矩MP在不同的转速比i下随泵轮转速nP的变化规律,而透穿性能是指其泵轮轴上的扭矩MP和转速nP随涡轮轴上扭矩MT和转速nT变化时相应的变化特性[1]。 液力变矩器的输入特性因其透穿性的不同而不同。透穿性强液力变矩器的输入特性曲线是一组曲线,随着透穿性的减小,输入特性曲线相互靠近,如图2(a)所示。对于绝对不透性的液力变矩器,输入特性图上只有一条抛物线如图2(b)所示。

图2 液力变矩器输入特性曲线
Fig.2 The input characteristic curve of hydraulic torque converter
叉车通常用的是不透性或微弱正透性的液力变矩器,因为不透的液力变矩器能可靠地防止发动机熄火。例如:当叉车紧急制动时,液力变矩器的涡轮停止转动,而泵轮转速不变,发动机不熄火。此时的液力变矩器起到了隔离作用,发动机的能量全部转换为搅油损失。
2 液力传动系统设计
2.1 发动机功率
Pej=Pn(净功率)+Pf(附件功率)=
βDvmaxVmax(G+Q)/(3 600η0)+Pf
式中:β—限速影响系数,β=1.1;Dvmax—高档动力因素;vmax—最大车速,一般为20 km/h;G+Q—叉车自重与起重量(N);η0—传动效率,液力传动取0.7;Pf—附件功率。(取附件功率10%)
在发动机功率的计算中,液力传动与机械传动的区别在于:1)液力传动的传动效率只有70%,比机械传动低。2)液力传动在选取高档动力因子时可适当减小,这样就可以减小发动机的功率。
2.2 液力变矩器与发动机的匹配
液力变矩器主要依靠其泵轮来吸收从发动机传递来的功率或转矩,其型号根据发动机选取,匹配原则如下:
1)为了保证车辆起步加速性好,尽量利用发动机的最大力矩,液力变矩器的零速泵轮力矩曲线应通过发动机的最大力矩点。
2) 为使机器有最大的输出功率,液力变矩器的最高效率泵轮力矩曲线应通过发动机的最大功率(额定功率)点附近。
3)为使机器的燃油经济性好,液力变矩器的最高效率泵轮力矩曲线应通过发动机的最低油耗值附近。

图3 发动机与液力变矩器的匹配
如图3所示:D、E点是较理想的工作点;A点为发动机最大转矩点(最大转矩及其对应的转速),B点为最大功率点(额定功率及其对应的转速),C点为最低油耗点(最低油耗比及其对应的转速)。
2.3 传动系统总速比的确定
叉车的最低档用来爬坡,总速比由要求的最大爬坡度决定,其本质是车轮转矩与发动机转矩之比,同时考虑效率[3]。此时机械传动的最大总速比为:
(G+Q)(αmax+f)r/(Meηt)
式中i变低—最低档速比;i主—主传动比;i轮—轮边减速器的速比;Ml—车轮的转矩;Me—发动机的转矩;ηt—机械传动部分的效率,可取为85%;αmax—最大爬坡度。
与机械传动相比,液力传动用液力变矩器取代了机械传动中的离合器。当叉车以最低档爬坡时,变矩器处于低速工况,涡轮力矩与变矩系数都在该工况下接近最大值[4]。所以,液力传动要在机械传动的基础上考虑液力变矩器变矩系数对速比的贡献,即此时液力传动中机械传动部分的速比是车轮转矩与液力变矩器涡轮转矩之比,同时考虑效率。因此,液力传动中机械传动部分的最大总速比为:
(G+Q)(αmax+f)r/(MTmaxηt)=
(G+Q)(αmax+f)r/(MpmaxKmaxηt)
式中:MTmax—变矩器涡轮最大转矩形;Mpmax—泵轮最大转矩(约等于发动机最大转矩);Kmax—叉车爬最大坡度时变矩比(略小于极限变矩比)。
叉车的最高档用来以最快速度行驶,总速比由要求的最大行驶速度决定,其本质是发动机转速与车轮转速之比[4],机械传动最小总速比为 :
0.377ner/(βvmax)i变低=i总max/i主i轮
i变高=i总min/i主i轮
式中:i变高—最高档的速比;nl—车轮的转速;ne—发动机转速。叉车在以最快速度行驶时,液力变矩器处于高速运行状态,起液力耦合器的作用,此时涡轮转速略低于泵轮转速。因此,在叉车以最高速行驶时,液力传动系统中机械传动部分的速比是液力变矩器涡轮转速与车轮转速之比,因此,液力传动的最小总速比为:
0.377nTmaxr/(βvmax)=0.377nPmaxri/βvmax
式中:nTmax—液力变矩器涡轮最大转速;nPmax—泵轮最大转速(发动机转速)。
i—叉车以最快速度行驶时变矩器的速比(约等于1).
3 实例计算
3.1 3 t叉车液力传动系统设计
参数:额定起重量Q=3 000/kg,自重G=4 500/kg,车轮半径r=0.351 mm.
(1)发动机的选择
Pej=βDvmaxVmax(G+Q)/(3 600ηt)+Pf=
31.7+Pf=31.7×1.1=34.87 kW
选取号型4L68的发动机,额定功率Pe=37 kW,额定转速ne=2 200 r/min.取最大转矩约等于额定转矩:
(2)液力变矩器
根据匹配发动机参数,额定功率Pe=37 kW,额定转速ne=2 200 r/min,选择液力变矩器型号为YJH265,其原始参数如表1所示:
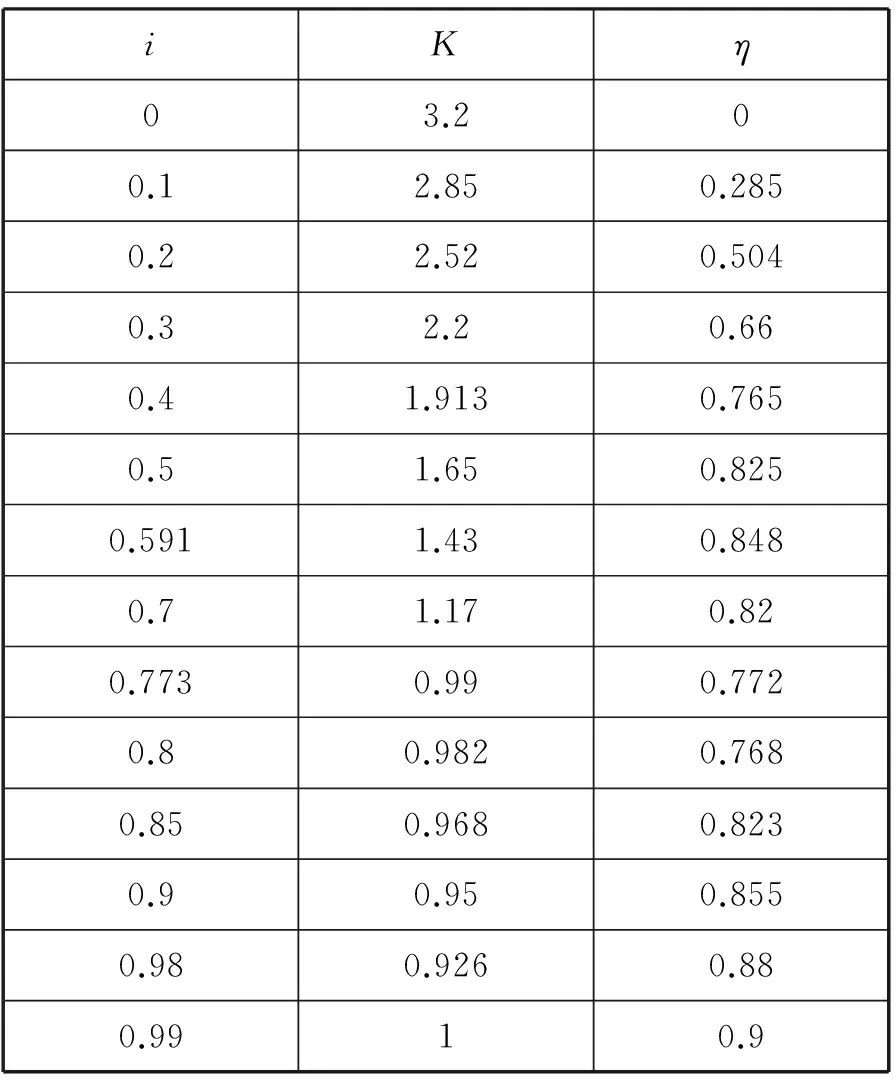
表1 YJH265原始参数
根据表格中原始参数绘制出液力变矩器原始特性曲线如图4所示:
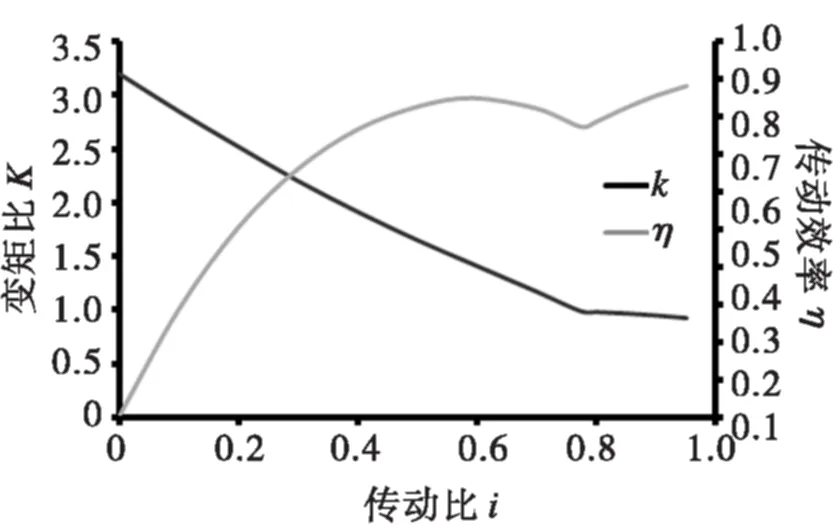
图 4 液力变矩器原始特性曲线
由原始参数可知: YJH265为多元件液力变矩器,最大力矩比为3.2,耦合工况液力变矩器的变矩比为1,速比为0.99.
(3)传动系统总速比的确定
取液力变矩器爬坡时的变矩比为3.1,则:
i总max=i变低i主i轮=(G+Q)(αmax+f)r/(MTmaxηt)=
(G+Q)(αmax+f)r/(MBmaxKηt)=
13.41
取液力变矩器平路满载行驶时的转速比为0.99,则:
i总max=i变高i主i轮=0.377nTmaxr/βvmax=
0.377nBmaxri/(βvmax)=
0.377×2 200×0.99×0.351/(1.1×20)=
13.10
由上述计算可知, 3 t液力叉车的两个档位的速比极为接近,因此只需一个前进档位即可。所以, 3 t液力叉车的变速箱又俗称倒档箱,只由一个前进挡和一个倒退档组成。
3.2 5 t叉车液力传动系统设计
参数:额定起重量Q=5 000 kg,自重G=7 500 kg,车轮半径r=0.42 mm.
(1)发动机的选择
Pej=βDvmaxVmax(G+Q)/(3 600ηt)+Pf=
42.78+Pf=42.78×1.1=47.058kW
选取型号4L88的发动机,额定功率Pe=48kW,额定转速ne=2 200r/min,取最大转矩约等于额定转矩:
(2)液力变矩器
根据匹配发动机参数,额定功率Pe=48kW,额定转速ne=2 200r/min,选择液力变矩器型号为YJH315,其原始参数如表2所示[4]:

表2 YJH315原始参数
根据表格中原始参数绘制出液力变矩器原始特性曲线如图4所示:
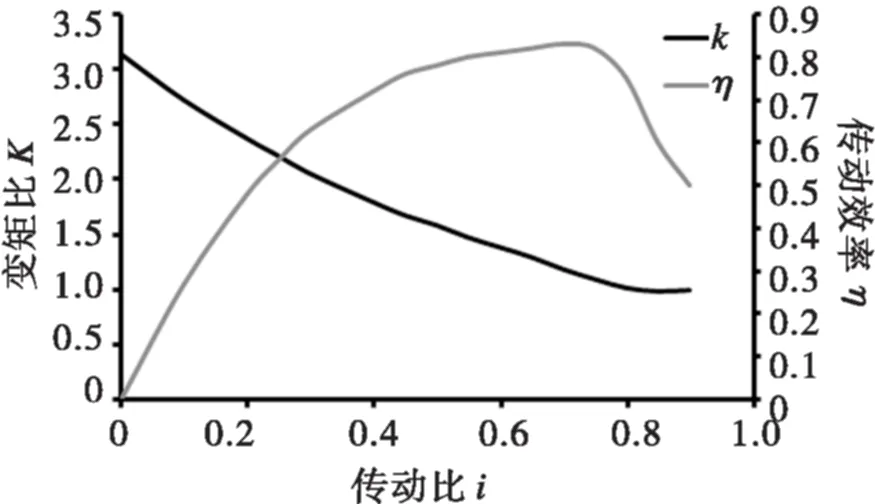
图5 YJH315原始特性曲线
Fig.5 The original characteristic curve of hydraulic torque converter
由原始参数可知:液力变矩器YJH315的最大力矩比为3.15,耦合工况的液力变矩器的变矩比略小于1(取0.99),速比为0.85.
(3)传动系统总速比的确定
取液力变矩器爬坡时的变矩比为3,则:
i总max=i变低i主i轮=
(G+Q)(αmax+f)r/(MTmaxηt)=
(G+Q)(αmax+f)r/(MPmaxKηt)=21.30
取液力变矩器平路满载行驶时的转速比为0.85,则:
i总max=i变高i主i轮=0.377nTmaxr/(βvmax)=
0.377nTmaxri(βvmax)=13.46
i变低=i总maxi主i轮==3.19
i变高=i总mini主i轮==2.02
(4)牵引特性
牵引力F=MTi主igηt/r
车速v=0.377nTr/i主ig
牵引特性曲线如图6所示:
由图6中可以看出,叉车在低速爬坡时的牵引力大,1档和2档之间有很大的重叠部分,这说明液力叉车在行驶过程中能够实现自动调速,不需要经常换挡,操作方便;且发动机不易熄火[2]。

图6 5t叉车液力传动系统牵引特性
4 结 论
通过机械传动系统与液力传动系统的对比计算,给出了液力传动系统的设计计算过程,方便设计者对液力传动的理解,使其在设计液力传动系统时简便快捷[5]。
[1] 周盼. 叉车液力传动系统匹配研究[D].太原:太原科技大学,2012.
[2] 陶元芳,卫良保. 叉车构造与设计[M].北京:机械工业出版社,2010.
[3] 曾文章. 绿色环保型4.5 t平衡重式内燃液力叉车的总体设计及计算[D].西安:长安大学,2011.
[4] 林振贤. 装载机动力传动系统参数匹配与仿真[D].沈阳:东北大学,2012.
[5] 胡海勇,陶元芳. 叉车动态稳定控制技术的研究[J].太原科技大学学报,2013,34(3):203-205.
ComparisonDesign of Hydraulic Transmission and Mechanical Transmission of Forklift Truck
TAO Yuan-fang, LIU Ya-qian, FENG Zhi-yuan
(Collegeof Mechanical Engineering,Taiyuan University of Science and Technology,Taiyuan 030024,China)
Hydraulic transmission gets the favor of people because of its advantages of automatic transmission and simple manipulation, and so on. However, due to the characteristics of the more complex of torque converter, it is difficult for the designer to design the hydraulic transmission system. In fact, the hydraulic torque converter is near the maximum torque ratio when forklift truck climbs the maximum slope, and the torque ratio is about 3, while the hydraulic torque converter is in the coupler state when forklift truck is at the highest speed, and the speed ratio is close to 1. In this paper, the design and calculation of the hydraulic transmission system is given by comparison with the mechanical transmission system, the concept is clear and the calculation is simple.
the hydraulic transmission, mechanical transmission,design calculation
1673-2057(2016)06-0457-05
2015-11-04
山西省研究生教育改革研究课题20102034
刘亚倩(1990-),女,硕士研究生,主要研究方向为机械传动系统设计。
TB112
A
10.3969/j.issn.1673-2057.2016.06.008
猜你喜欢
计算机仿真(2022年7期)2022-08-22
南方农机(2021年2期)2021-12-27
内燃机与配件(2020年3期)2020-09-10
湖北农机化(2020年9期)2020-01-08
——变矩器的锁止控制
汽车与驾驶维修(维修版)(2019年9期)2019-10-14
汽车零部件(2016年10期)2016-12-06
汽车工程(2016年11期)2016-04-11
汽车维修与保养(2015年12期)2015-04-18
汽车工程(2014年7期)2014-10-11
传动技术(2014年1期)2014-02-27