某400型随车起重机特性分析
2016-12-29 02:10晋民杰乔建璐
太原科技大学学报 2016年6期
晋民杰,胡 琴,范 英,乔建璐,荆 华
(太原科技大学交通与物流学院 太原 030024)
某400型随车起重机特性分析
晋民杰,胡 琴,范 英,乔建璐,荆 华
(太原科技大学交通与物流学院 太原 030024)
为了深入研究折臂式随车起重机的性能,从运动学、动力学、强度理论及稳定性等方面展开分析。首先,建立某400型起重机运动学数学模型,对吊点包络图、速度、加速度进行分析,为后续的动力学和起重特性分析做准备;其次,建立随车起重机的Creo动力学仿真模型,并分析了各个构件的受力情况;最后,结合强度和稳定性分析研究存在的问题及下一阶段工作计划性能,并绘制起重作业图。
随车起重机;运动学分析;动力学分析;起重特性分析
折臂式随车起重机主要由吊臂、动臂、立柱和多组变幅油缸等机构组成[1],是安装在汽车上的一种起重装备,具有高效、灵活、便捷的特点,在土木建筑、交通运输及物流等行业的货物装卸中得到了广泛的应用。
折臂式随车起重机的运动学分析是机构研究的基础,动力学分析研究各部件的受力情况,为强度分析做准备。然后根据强度和稳定性分析研究随车起重机的性能,获得起重特性图。因此,将运动学、动力学、对折臂式随车起重机进行起重特性研究具有很重要的工程意义。
1 运动学分析
本文把各液压缸伸缩量设为变量,建立运动学分析模型,以吊点为研究对象进行运动学仿真分析,计算并绘制吊点轨迹图、速度图和加速度图,为折臂式随车起重机的动力学分析奠定基础。
1.1 数学模型的建立
把铰接点的位置简化成点。其中,图1中的32号点为吊点。令动臂油缸下铰接点5为坐标原点,水平向右为横坐标,竖直向上为纵坐标,建立直角坐标系,并将有关联的点连接成为直线,得到点线结构,如图1所示。这些直线代表各杆件的长度,其中l1表示动臂液压缸,l21表示吊臂液压缸,l32表示伸缩臂液压缸,它们的长度均能在一定范围内变化,剩余编号的杆件长度则为固定值。又标注的角度中,θlx、θ23和θ223为常量,其它角度均为变量。
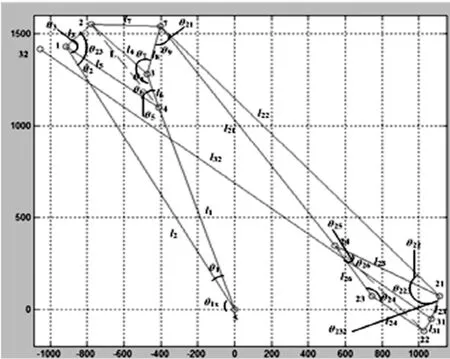
图1 铰接点、角度和杆件编号
根据图1几何关系,利用余弦和正弦定理可以确定相关的角度和长度。具体计算公式如下。
(1)
(2)
θ3=θ23-θ2
(3)
(4)
(5)
(6)
(7)
(8)
由以上公式便可推出点1~7相对点5的坐标公式。其中,部分点的坐标公式如下。
(9)
(10)
(11)
同理,可以得到其它点的坐标位置。其中,吊点的坐标公式如下。
(12)
(13)
由以上公式可以发现,传统的的解析算法只能求解处于静态状态下的各点坐标,计算范围狭窄,不能满足更高的计算要求,需寻求计算范围更广的算法。
1.2 包络图的绘制
吊点包络图是吊点所能到达的所有极限位置围成的闭合图形,能反映出吊点的作业区域、性能参数及机构干涉情况等[2]。根据表1所示极限工况绘制出吊点包络图,如图2所示。
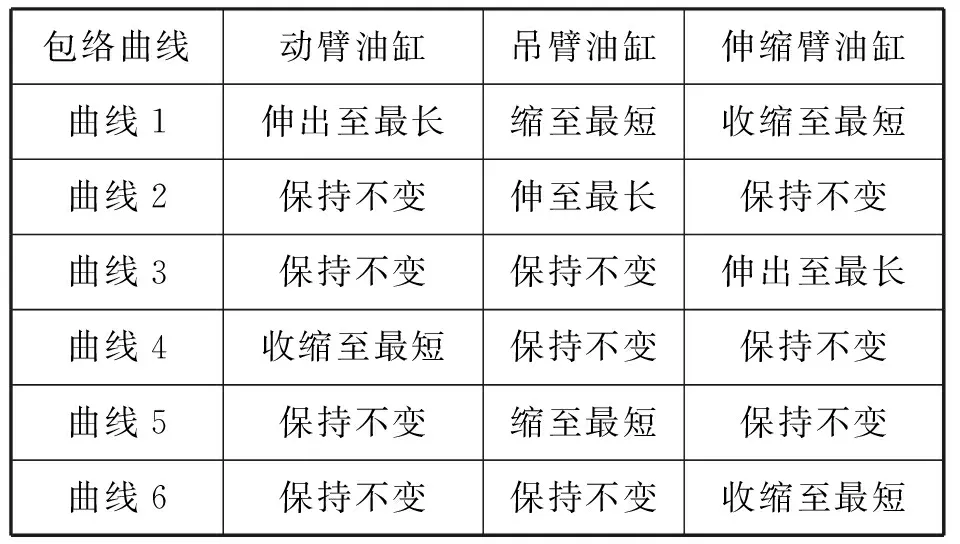
表1 各油缸动作情况
该起重机的理论工作范围如图2所示,这是过起重机回转中心轴线的工作断面上的吊点包络图。而实际的工作范围还受到安装位置、臂架强度、工作压力及稳定性等因素的制约。
1.3 吊点速度图和加速度图
用传统解析法求解吊点的速度和加速度非常繁琐和困难。然而差分法求解这些问题则很便捷[3]。MATLAB自带求解n维向量差分序列的diff函数,具体函数公式如下:
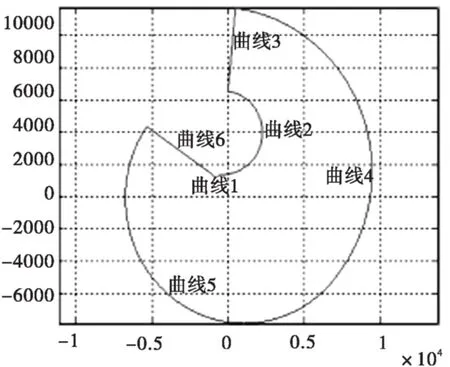
图2 吊点包络图
Fig.2 Envelope diagram
diff(X)=[X(2)-X(1)…X(n)-X(n-1)]
(14)
数组输入吊点位移X,速度的近似解则为
v=diff(X)/Δt
(15)
数组输入吊点速度V,加速度的近似解为
α=diff(X)/Δt
(16)
以吊臂油缸全伸,伸缩油缸伸长1 036.97 mm工况为例,利用MATLAB的getframe命令绘制吊点的加速度图,如图4所示。
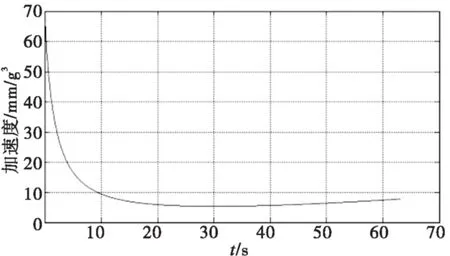
图3 吊点加速度图
由图3可知,吊点的加速度曲线平滑,无突变情况,说明该随车起重机在各种工况下均不存在机构干涉或其他异常状况[3]。
2 建立动力学模型
利用Creo的动态分析检测出各构件的受力状况,获得受力最大的部件。为折臂式随车起重机的强度分析奠定基础。
2.1 Cero动力学模型
基于已有的公共数据平台,混合利用直接建模法和参数建模法,创建某400型起重机的三维模型。建立的模型如图4所示。
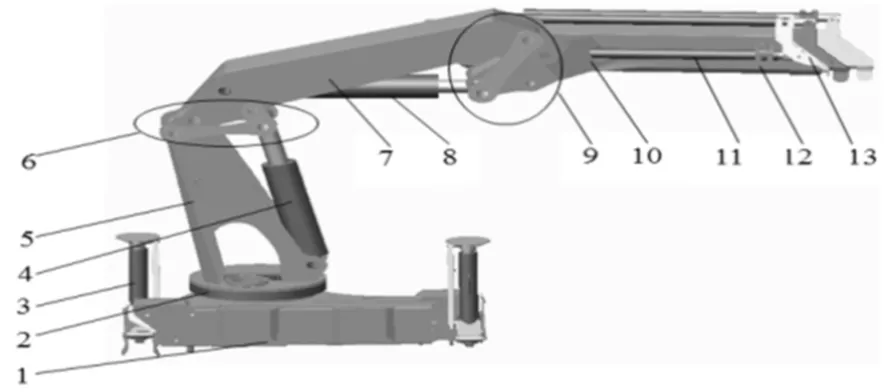
1.底座2.旋转平台3.支腿4.动臂油缸5.立柱 6.四连杆Ⅰ7.动臂8.吊臂油缸9.四连杆Ⅱ 0.吊臂11.伸缩臂油缸12.基本臂13.伸缩臂
利用Creo的动态分析检测出各构件的受力状况,获得如图5所示的动力学分析总揽图,横纵坐标分别是仿真时间(S)与各个构件的受力(N).仿真全过程中动臂和动臂油压缸受力最大,在同一工况下,动臂油压缸往往会过载,吊臂油压缸举升能力满足要求。
由图5知,各销轴类零件采用合适的材料经过适当的热处理能达到该起重机各构件的强度要求[4]。同时,与该起重机作业各构件受力曲线进行对比,验证了模型的正确[5]。

图5 受力分析总揽
3 起重特性图的绘制
折臂式随车起重机的起重特性包括强度起重特性分析和整机稳定性起重特性分析[6]。
3.1 强度分析
由于吊臂经常因强度不足而发生破坏[7],因此,根据吊臂来分析折臂式随车起重机的起重特性是很有必要的。
由图6可知,基本臂的A点位置处的横截面没有加强筋且在没加强筋的最左端,是最危险截面。且在第二节和第三节伸缩臂伸缩时,A处壁厚变薄,极易不满足强度条件。

图6 线框显示的吊臂
伸缩臂可近似看作细长杆来计算其强度,伸缩臂受到的正应力和剪应力都要小于许用值,具体计算公式如下。
(17)
(18)

应用MATLAB进行参数化编程,绘制各工况下伸缩臂强度决定的起重量。图7为第一节伸缩臂的强度确定的起重量与其伸缩长度与θ的关系图。
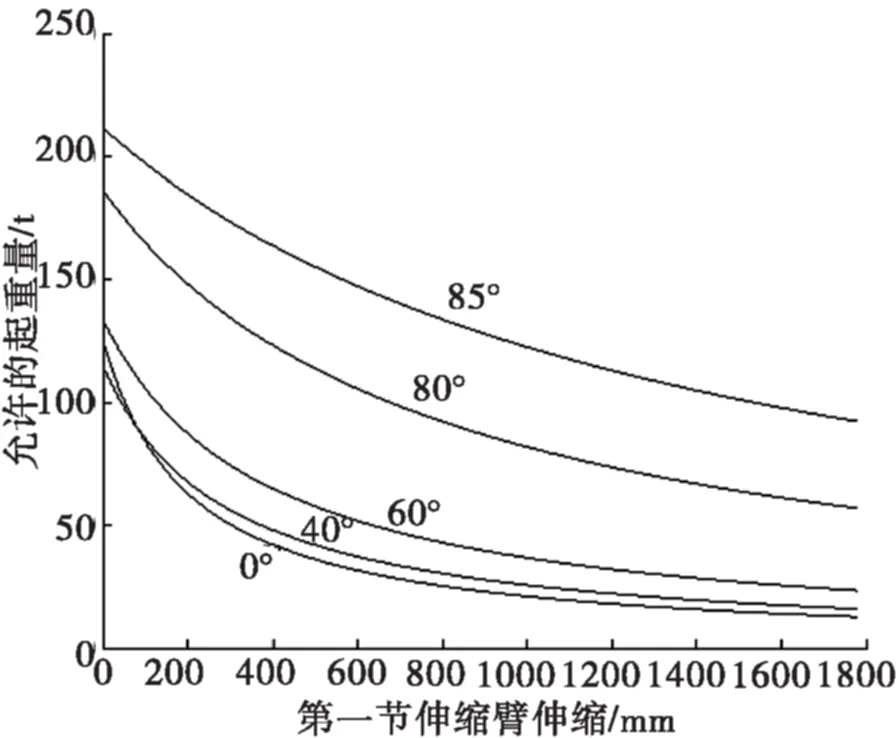
图7 起重量与伸缩臂长度和θ的变化图
由图7可知,随角度θ的增加,伸缩臂允许的起重量增大,即θ为0°时,伸缩臂能带动的起重量最小,伸缩臂受到的正应力最大,最易超过许用值。又θ越小曲线上移速率就越小。因此起吊重物时应尽量避免伸缩臂接近水平位置。
第二节和第三节伸缩臂运动时,将θ为0°的曲线进行对比,如图8所示。由(a)图可知,基本臂比第一节伸缩臂允许的起重量小。由(b)图可知,基本臂和第一节伸缩臂允许的起重量有交叉,即第三节伸缩臂的伸长量大于交叉点的横坐标值时,起重量由第一节伸缩臂强度决定;反之,起重量由基本臂强度决定。
将图7、图8合并,经过幅度的换算得到由强度决定的幅度-起重量曲线,如图9所示。
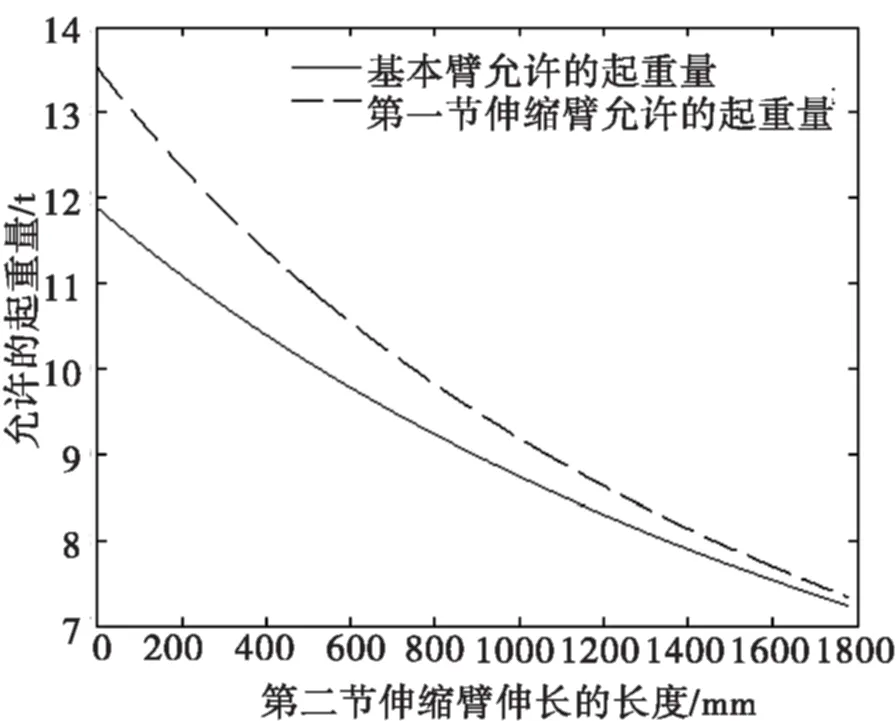
(a)第二节伸缩臂运动的起重量对比图
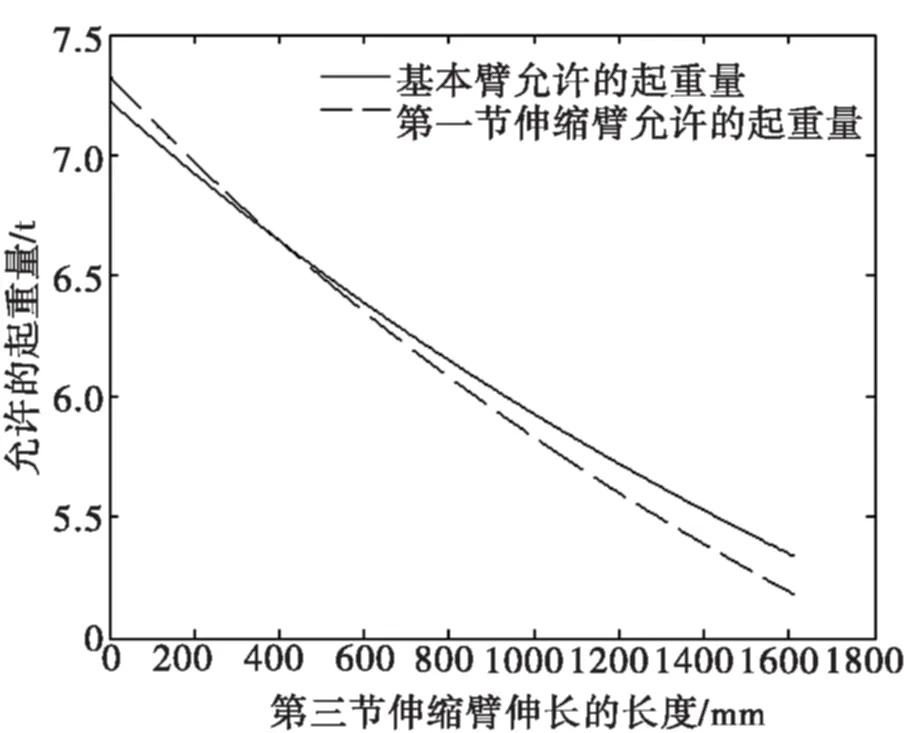
(b)第三节伸缩臂运动的起重量对比图
Fig.8 The contrast diagram of lifting weight
3.2 稳定性分析
折臂式起重机一般安装在车厢与车头之间,共有6条倾覆线,如图10所示。

图9 由强度决定的幅度-起重量曲线
由图10可知,起重机对倾覆线1和4的抗倾覆能力最强。又根据对称性,起重机对倾覆线2和6的抗倾覆能力相同,对倾覆线3和5的抗倾覆能力相同,因此只需绘制由倾覆线2和倾覆线3决定的起重量即可,图11是由稳定性决定的起重量曲线对比图。将图11中起重量小的部分合并,便得到由稳定性决定的幅度—起重量曲线,如图12所示。

图10 折臂式随车起重机的倾覆线
Fig.10 Overturn line of folding-jib lorry loading crane

图11 稳定性决定的起重量对比图

图12 由稳定性决定的幅度-起重量曲线
3.3 绘制起重特性图
将图7和图12所示的曲线合并,并除以相应的安全系数,便得到起重特性曲线,如图13所示。
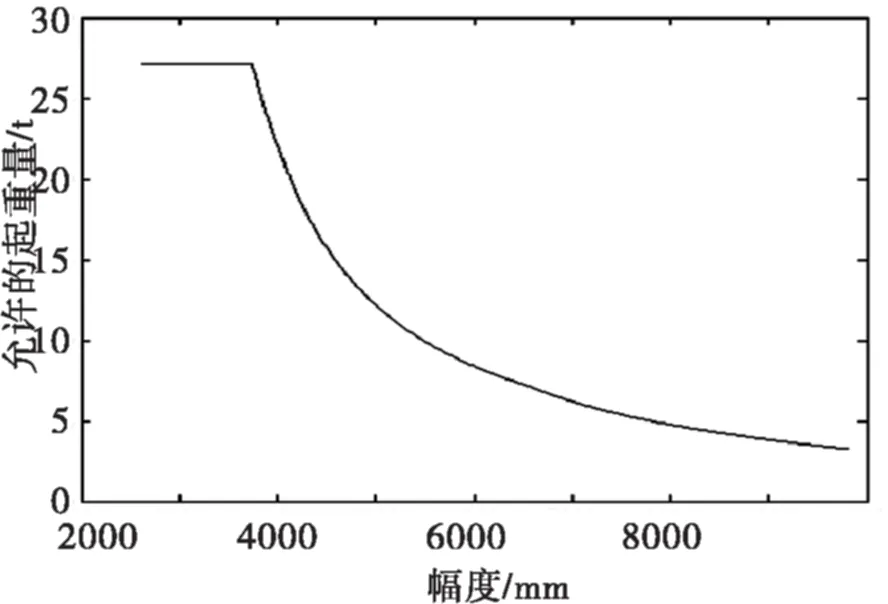
图13 起重特性曲线
根据起重特性曲线,则可得到起重机起重性能表[8],如表2所示。
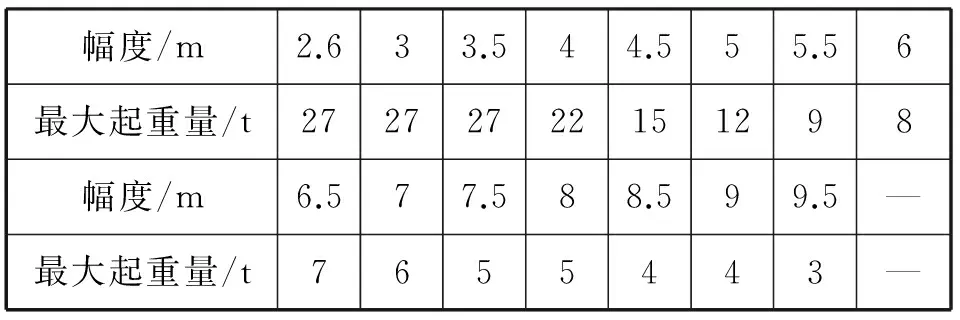
表2 起重性能表
4 结 论
(1)对折臂式随车起重机进行运动学分析,获得吊点的速度、加速度曲线。这些曲线均能光滑过渡,无突变情况,说明该机构不会出现运动干涉或其他异常状况。
(2)绘制了起重机吊点包络图,为动力学分析奠定了基础。
(3)利用Creo对折臂式随车起重机进行动态分析,分析结果表明动臂油压缸受力最大,属于随车起重机起吊机构危险构件,应尽量避免水平以下大载荷作业。为随车起重机的强度分析做准备。
(4)对折臂式随车起重机进行强度和整机稳定性分析,发现最易折断的构件是吊臂,最易失稳的位置是倾覆线2、3、5和6.将两种分析方法结合,进行了该折臂式随车起重机的起重特性分析,并绘制了起重特性图。
[1] 李杰峰.中大吨位折臂式随车起重机吊臂工艺设计与焊接变形控制技术研究[D].石家庄:河北科技大学,2010.
[2] 王在昌.液压挖掘机工作装置动力学分析及有限元优化设计[D].济南: 山东科技大学, 2011.
[3] 袁开磊,史青录,曲德韵.挖掘机工作装置的运动学建模与仿真[J].矿山机械,2012,40(3):33-36.
[4] 詹友刚.Pro/ENGINEER野火版4.0机械设计教程[M].北京:机械工业出版社,2001.
[5] 姚婧辉.随车起重机变幅机构仿真研究[D].大连:大连理工大学,2009.
[6] 张帅,折臂式随车起重机参数化动力学仿真分析[D].太原:太原科技大学,2014.
[7] 任世杰.塔式起重机臂架有限元分析系统设计及研究[D].西安:长安大学,2009.
[8] 周奇才,代习伟,李文军.臂架式起重机起重特性计算[J].机械设计与研究,2011,27(4):114-117.
Analysis on theCharacteristics of a 400-type Vehicle Crane
JIN Min-Jie, HU Qin, FAN Ying, QIAO Jian-Lu, JING Hua
(Institute of transportation and logistics, Taiyuan University of Science and Technology, Taiyuan030024, China)
In order to study the folding arm type with the performance of truck crane from kinematics, dynamics, strength theory and stability analysis. First of all, the establishment of a 400-type crane kinematics mathematical model, the hanging point envelope, the velocity and acceleration, were analyzed for the subsequent dynamics and characteristics analysis of preparation; secondly, the Creo dynamics simulation model of truck crane was established, and the stress of each component was analyzed. Finally, combined with the strength and stability analysis of the existing problems, the next stage work plan performances were studied and the heavy work was drawn.
Lorry loading crane, kinematic analysis, dynamic analysis, the lifting characteristic analysis
1673-2057(2016)06-0480-06
2015-11-30
山西省太原科技大学研究生科技创新项目(20145014);太原科技大学教学研究与改革项目(2013013);山西省科技攻关项目(20150313014-2)
晋民杰(1963-),男,教授,主要研究方向为矿山机械、起重运输机械专业研究;通信作者:胡琴,E-mail:412542111@qq.com
TH2
A
10.3969/j.issn.1673-2057.2016.06.012
猜你喜欢
石油和化工设备(2022年1期)2022-02-22
石油和化工设备(2020年5期)2020-06-09
专用汽车(2018年10期)2018-11-02
大陆桥视野·下(2017年8期)2017-09-19
中国修船(2017年4期)2017-08-17
山东工业技术(2016年15期)2016-12-01
专用汽车(2016年1期)2016-03-01
制造业自动化(2014年9期)2014-12-19
专用汽车(2014年5期)2014-08-24
船海工程(2013年1期)2013-06-12