
物品分拣搬送装置设计*
2016-12-30 01:43邢晓敏朱一多
武汉交通职业学院学报 2016年4期
邢晓敏 朱一多
(武汉交通职业学院,湖北 武汉 430065)
物品分拣搬送装置设计*
邢晓敏 朱一多
(武汉交通职业学院,湖北 武汉 430065)
系统以ATmega2560单片机为核心,利用图像识别模块采集物品图像信息,然后经过色调过滤算法确定物品颜色及位置。最后,单片机输出3路脉冲信号到步进电机驱动器,驱动固定在滑台x、y、z轴的3个步进电机工作,使固定在滑台z轴的机械手到达指定位置并完成抓取任务,搬送物品到指定坐标后发出声光报警。整个系统的设计精度高,具有较强的实用性。经过测试,各项指标均能较好地满足设计要求。
ATmega2560;色调过滤算法;高精度滑台
近年来互联网技术高速发展,网络购物及网络支付方便快捷,网购成了人们日常生活中的购物首选,使得物流业井喷式发展。物品的分拣搬送作为物流业的一个重要环节,不仅影响后续物流顺畅作业,而且极大地保护了顾客权益,避免暴力分拣事故发生,因此越来越受到各大快递公司的重视。目前,我国拥有世界最大的物流市场,如何更好地发展与完善受到学者的广泛专注。杨丹丹[1]设计了一种基于ARM的物流包裹分拣机控制系统,该系统结合条码扫描器已完成对不同包裹的分拣,具有成本低、效率高的优势。黄伦[2]模拟了垃圾分类的识别技术,并通过实际应用验证了技术的可行性。张俊[3]等人设计了一种基于PLC及MCGS二级结构型自动分拣系统,能够完成快递的快速分拣工作。张绪鹏[4]针对药品自动分拣系统的特点,将模块化设计思想引入该系统中,从而完成对药品的自动分拣分析。可以看出,物品分拣是计算机技术、自动化技术、机械控制技术的综合应用[5-7],物流的快迅发展对物品分拣精细化和可靠性要求越来越高,设计高精度的物品分拣系统十分必要。上述这些系统分拣装置虽然都取得了一定的物品分拣效果,但是这些装置存在只能识别规定物体、操作精度低等缺点,为此本文设计了一种新的物品分拣搬送装置,该装置基于ATmega2560单片机,采用图像识别模块采集物品信息,并通过色调过滤算法[8-10]确定物品颜色及位置,从而完成物品的分拣操作。
1 方案论证
1.1 系统总体设计方案
系统总体设计方案如图1所示:
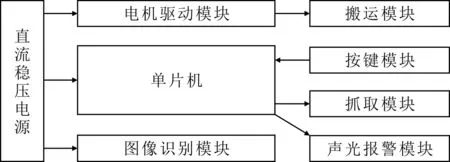
图1 系统总体设计方案
1.2 具体方案论证
1.2.1 微处理器的选择
采用Arduino Mega2560。Arduino Mega 2560是一款基于ATmega2560的微控制器板。它有54个数字输入/输出引脚(其中15个可用作PWM输出)、16个模拟输入、4个UART(硬件串行端口)、1个16 MHz晶体振荡器、1个USB连接、1个电源插座、1个ICSP头和1个复位按钮,USB供电。由于其理想的PWM输出特性,是控制电机首选器件。
1.2.2 图像识别模块的选择
采用Pixy Cmucam5模块。Pixy Cmucam5是由Charmed实验室联合卡内基梅隆大学共同推出的一款图像传感器。其强大的处理器上搭载着一个图像传感器,它会选择性的处理有用的信息,将特定颜色的物体的视觉数据发送给相互配合的微型控制器,而不是输出所有视觉数据以进行图像处理。该模块不仅能进行颜色识别,还能知道带颜色物品的位置,通过颜色来追踪物体。
1.2.3 搬送装置的选择
采用高精度三轴滑台加机械手。滑台x,y轴水平移动,可以找到物品的位置,再通过滑台z轴的竖直移动和机械手动作完成抓取任务,最后搬送到指定的区域。三个坐标轴各用一台电机进行运动控制,机械手固定在z轴底部,用一台舵机控制。滑台实物图如图2所示。
其次,由于高中实验难度较大,对学生的理论知识、实验技能有较高的要求,学生独立操作无法有效完成实验。在这种情况下,教师可以采取分组实验的方法,让学生以小组为单位进行实验任务的分配,充分调动小组内每位成员的积极性,保证实验人员配置的最优化,集思广益,取长补短,从而提高化学实验的操作效率,培养学生的合作意识。
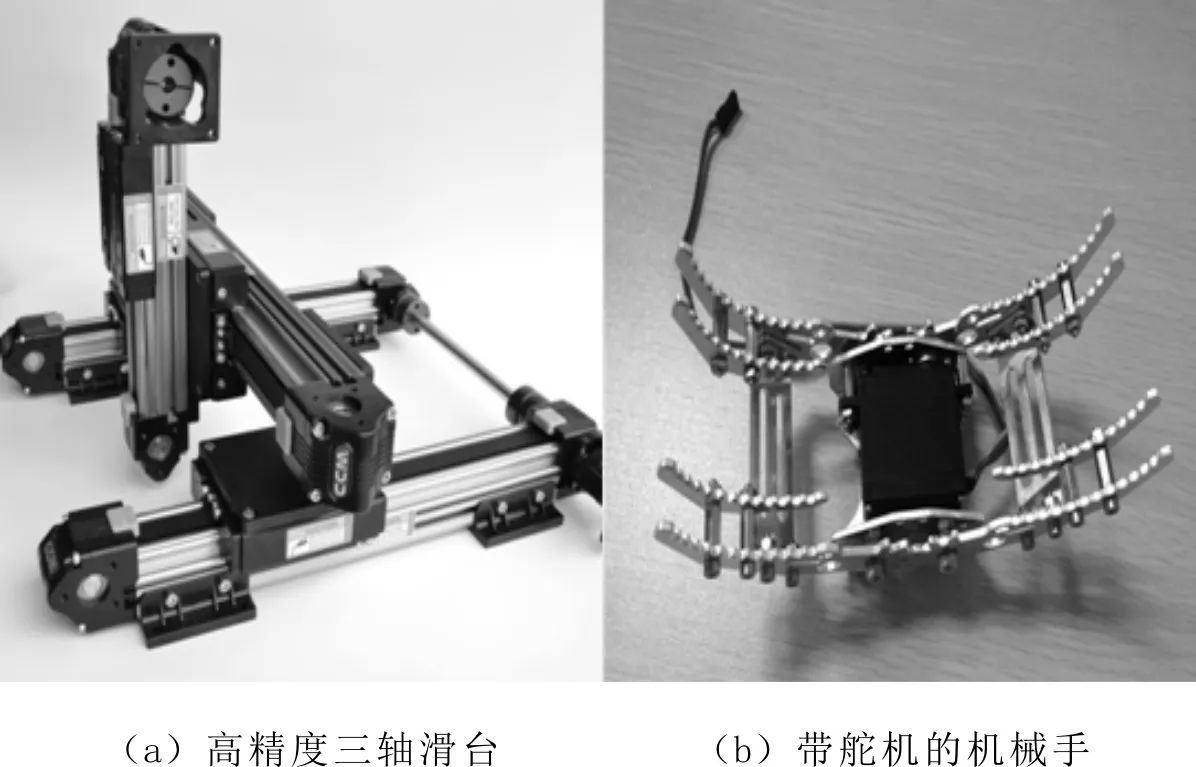
图2 滑台实物图
1.2.4 电机驱动模块
电机驱动模块选用MB450A两相混合式步进电机驱动器。该电机驱动器采用直流18~50V供电,驱动电压24V~50V,电流小于4.2A。此驱动器采用电流环进行细分控制,电机的转矩波动很小,低速运行很平稳,几乎没有振动和噪音。高速时力矩也大大高于其它二相驱动器,定位精度高。该步进电机静力矩1.8Nm,步距角为1.8度,连续收到200个步进指令正好转一圈。当驱动器设置为128细分时,单片机向驱动器发送25600个脉冲,电机转一圈。因此,单片机可以通过脉冲信号对电机进行极高精度的控制。
2 理论分析与计算
2.1 色调过滤算法
本系统在图像识别时使用色调过滤算法来识别物体。相对于灰度图像而言,彩色图像能够提供更多的信息,尤其是颜色信息。如果按照现有匹配算法的处理模式,彩色图像需要先转换为灰度图像,这就丢掉了颜色信息,有可能会降低匹配算法的性能。另一方面,彩色图像具有颜色恒常特性,能有效克服环境光照亮度变化对匹配算法的影响,从而提高匹配的鲁棒性。在各颜色空间中,RGB颜色是最常用的颜色空间,但提供的图像彩色信息较少;HSV颜色空间结合了人类心理学和颜色视觉的特点,能够提供更多的颜色信息,因此在HSV颜色空间能够取得更好的图像匹配效果。
HSV模型是一种符合人类主观感觉的色彩模型。在HSV模型中:色调H(hue)表示从一个物体反射的或透过物体的光波长,表示颜色的种类,如红、橙、绿,它用角度-180°~180°或0~360°来度量;饱和度S(saturation)指颜色的深浅,例如同样是红色,也会因浓度不同而分为深红和浅红,它也用百分比来度量,从0到完全饱和的100%;亮度V(value)是颜色的明暗程度,取值为[0,1]。
通过将彩色图像从RGB空间转换到HSV空间,能够有效地提取出彩色图像中的颜色信息。另外,由于彩色图像中景物的色调信息(H)具有恒常性,它不易受到光照条件变化的影响,因此适应性更强。
本系统在图像识别前,预先将被识别物体(立方体或乒乓球)的HSV值存入处理器,然后在识别过程中,将实时图像中各个坐标的HSV值与存储器中内容对比,从而找到匹配的物体,并将匹配物体的坐标发送给电机控制装置。从图3图像识别结果示意图可以看出,黄色方块(s=1)和红色方块(s=2)均能良好识别。实验证明,此方法对其他颜色的物体也能快速识别,取得良好的效果。
当然此方法也有一定的局限性,因为使用色调识别法,物体应有明显的色调,黑、白或灰色物体因为色调不明显而不易识别。

图3 图像识别结果示意图
摄像头图片x轴坐标范围为(0,320),y轴坐标范围为(0,200),物体所在平面x轴坐标范围为(0,150cm),y轴坐标范围为(0,100cm),据此将摄像头图片坐标转换为物体平面坐标。设滑台动作起点坐标为(x1,y1),终点坐标为(x2,y2),则滑台x轴位移距离为x2-x1,y轴位移距离为y2-y1。当位移距离为正数时,单片机控制电机正转,滑台沿坐标轴正向移动;当距离为负数时,电机反转,滑台沿坐标轴负向移动。移动的距离由单片机发送给电机驱动器的脉冲数决定。整个匹配过程如图4所示。抓取物体时,张开固定在z轴滑台的机械爪,沿z轴负向移动,到达指定高度后,收拢机械爪,沿z轴正向移动至起始高度,从而完成抓取。单片机向驱动器发送的脉冲数与位移距离是正比例关系,可以据此对单片机进行编程。

图4 步进电机动作与坐标匹配
3 硬件电路与程序设计
3.1 硬件电路的设计
硬件电路由ATmega2560控制板模块、电源模块、图像识别模块、电机驱动模块、按键模块、声光报警模块组成。系统硬件电路原理图如5所示。
3.2 程序设计
主程序设计流程图如图6所示,首先根据实际需求确定工作任务(待抓取物体的颜色),由摄像头获取实时图像,再通过色调过滤算法将待抓取物体从背景颜色中提取出来并确定所有物体的坐标。单片机对坐标进行处理后控制三轴滑台移动和机械手运动,实现物体抓取和搬送,并在完成任务后进行声光提示。

图5 系统硬件电路原理图

图6 主程序设计流程图
4 系统测试
4.1 测试工具及场地
测试工具有水平尺、直尺、秒表。测试场地为一个以木条(截面不大于3cm×4cm,木质本色)围成的100cm×150cm的A区域内,颜色为白色,B区域为黑色,C区域为红色。

图7 测试场地
4.2 测试方法
本系统通过按键来选择系统工作模式,图像识别模块将物品颜色及位置信息发送到Arduino Mega2560,经过分析运算后,驱动电机运动并完成搬送任务。观察搬送物体是否到达目的地,记录搬送总时间。
4.3 测试数据
(1)从A区域搬送12只黑色正方体(位置随机)到B区域所花时间及搬送情况如表1所示。

表1 搬送黑正方体所花时间及搬送情况表
(2)从A区域搬送12只黑色正方体(位置随机)到C区域所花时间及搬送情况如表2所示。

表2 搬送黑正方体所花时间及搬送情况表
(3)从A区域12只桔黄色与黑色正方体(位置随机)中搬送桔黄色正方体(个数随机)到C区域所花时间及搬送情况如表3所示。

表3 搬送桔黄色正方体所花时间及搬送情况表
(4)从A区域12只桔黄色与黑色乒乓球(位置随机)中搬送桔黄色乒乓球(个数随机)到C区域所花时间及搬送情况如表4所示。

表4 搬送桔黄色乒乓球所花时间及搬送情况表
4.4 测试结果分析
从上表可以看出,本文设计的物品分拣搬送装置能在较短的时间内对被搬运物进行识别并搬运到指定位置,充分证明了色调过滤算法的实用性,克服了传统物品分拣装置只能识别规定物体、操作精度低等缺点,是电机控制技术与视频识别技术的良好结合,对于提高物品分拣智能化具有积极意义。
[1]杨丹丹. 基于ARM的物流包裹分拣机控制系统的设计[D]. 太原:中北大学,2015.
[2]黄伦,刘沛,谭涛.智能垃圾分拣系统的模拟与实现[J]. 机电工程,2014,31(11): 1452-1456.
[3]张俊,徐淑英.快递自动分拣系统的设计[J]. 自动化应用,2015 (12): 88-89.
[4]张绪鹏. 药品自动分拣系统的模块化设计[D]. 济南:山东轻工业学院,2012.
[5]蒋蕊聪.自动分拣系统[J]. 中国储运,2007 (11): 76-78.
[6]李翔, 蔡波.自动分拣系统检测装置的研制[J]. 微计算机信息,2005, 21(11): 101-103.
[7]程伟中.自动分拣输送设备与技术及其应用[J]. 物流技术与应用,2005,10(10): 65-68.
[8]杨金峰, 申铉京.基于内容的敏感图像过滤关键技术研究及应用[J]. 仪器仪表学报,2007,28(11): 2059-2066.
[9]陈家伟.基于内容的图像过滤[D]. 广州:华南理工大学,2010.
[10]杨庆祥.敏感图像过滤系统的算法研究[D]. 天津:天津大学,2008.
2016-11-10
邢晓敏(1979-),女,湖北钟祥人,武汉交通职业学院讲师,主要从事检测技术、自动化控制研究。朱一多(1982-),男,湖北随州人,武汉交通职业学院讲师、在读博士,主要从事智能控制研究。
10.3969/j.issn.1672-9846.2016.04.020
TH691.5
A
1672-9846(2016)04-0080-04
猜你喜欢
汽车实用技术(2022年15期)2022-08-19
佳木斯大学学报(自然科学版)(2021年6期)2021-12-21
电子制作(2019年16期)2019-09-27
意林·全彩Color(2019年7期)2019-08-13
中国交通信息化(2019年4期)2019-07-13
童话世界(2019年14期)2019-06-25
摄影之友(影像视觉)(2019年2期)2019-03-05
电子制作(2018年19期)2018-11-14
电子制作(2018年14期)2018-08-21
机械管理开发(2018年2期)2018-03-16
