
基于实时负载转矩反馈补偿的永磁同步电机变增益PI控制
2017-01-03 03:05李叶松
电工技术学报 2016年23期
关 欣 李叶松
(华中科技大学自动化学院 武汉 430074)
基于实时负载转矩反馈补偿的永磁同步电机变增益PI控制
关 欣 李叶松
(华中科技大学自动化学院 武汉 430074)
为了减小负载转矩扰动对永磁同步电机转速的影响,对负载转矩扰动下永磁同步电机(PMSM)伺服系统数学模型的频域特性进行了研究,总结出负载转矩扰动和速度PI控制器参数之间的关系,提出了基于负载转矩反馈补偿的永磁同步电机变增益PI控制方案。变增益PI(VGPI)控制器根据转速信号中特定频率分量的变化,进行控制器增益的实时调节;同时采用FPGA器件设计并实现了基于Kalman滤波器的负载转矩观测器,能够对负载转矩扰动进行实时观测和补偿,提高了永磁同步电机伺服系统对负载转矩扰动的抑制能力。实验结果验证了控制策略的有效性。
永磁同步电机 负载转矩扰动 变增益PI 负载转矩观测器
0 引言
近年来,由于永磁同步电机(Permanent Magnet Synchronous Motor,PMSM)具有结构简单、控制性能优越等特点[1],以其作为控制对象的交流伺服系统得到了广泛应用。交流伺服系统的控制目标之一是确保输出转速能够很好地跟随指令的变化,但负载转矩扰动的存在必然会导致转速波动的产生,为了实现高准确度、高性能的伺服控制,需要PMSM伺服系统的速度控制具有更高的性能。
PMSM伺服系统速度环控制器通常采用的是PI控制方式,具有结构简单、调试方便、便于理解等优点。但由于多数PI控制器的控制参数在系统的整个运行过程中保持不变,设计人员很难找到最优的控制参数,既能满足系统全范围稳定又能保证系统有足够高的带宽,以应对运行过程中的各种负载扰动[2]。因此采用控制参数变增益的思想来设计新型控制器或控制架构以抑制负载转矩扰动成为国内外学者研究的热点。随着控制理论的发展以及微处理芯片运算能力的提高,自适应抗扰控制[3-5]、神经网络控制[6]、滑模控制[7-9]和其他前沿的控制策略[10]被应用于PMSM控制。然而这些算法大多实现起来比较复杂,通用性不强,在实际工程应用中会有诸多限制。另一方面,在PMSM伺服系统的多闭环控制结构中,转矩控制具有较高的带宽,如何利用内环响应的快速性来及时削弱负载转矩扰动对转速响应的影响,使得应用负载转矩观测并进行前馈补偿的控制思想成为广泛尝试的研究方向。当前,国内外学者采用了多种结构的观测器进行负载转矩的观测[11-14]。文献[11]将外加负载转矩看作是系统扰动,构建了扰动观测器(Disturbance Observer,DOB)进行负载转矩的观测,虽然DOB结构较为简单,其实质为机械运动方程的变形,在实际工程应用中,DOB的时间常数较难选择,同时其观测准确度也会受到机械参数的影响。相较之下,采用Kalman滤波器(Kalman Filter,KF)能够有效地削弱系统干扰和测量噪声的影响[1],具有较好的特性,但其计算的复杂性和观测的实时性是工程应用的难点,目前所广泛应用的软件伺服实现方案很难在完成复杂的递推观测运算的同时,使其具有较短的观测周期,因此难以满足观测的实时性。
本文通过建立PMSM速度控制模型,推导出从负载转矩扰动到输出转速的传递函数。将负载转矩看作输入信号,对系统的频域特性进行分析,总结出负载转矩扰动响应和速度环PI控制器参数的关系,据此提出了基于负载转矩反馈补偿的PMSM变增益PI控制方案,以减小因负载转矩扰动所产生的转速波动并缩短转速响应的稳定时间。变增益PI(Variable Gain PI,VGPI)控制器一方面保留了传统PI控制器结构简单的优点,另一方面也改进了传统PI控制器固定参数特性的不足,使控制器参数随运行状态进行改变,系统具有更强的负载扰动抑制能力[15];同时借助FPGA硬件构建了基于Kalman滤波器的负载转矩观测器,观测器的硬件实现不会占用微处理器的资源和执行时间。此外本文对Kalman递推算法进行整理,利用FPGA实现了并行运算,缩短了运算时间。变增益PI控制器和负载转矩观测器相结合进一步提高了系统对负载转矩扰动的响应特性。最后在所搭建的实验平台上,对本文提出的控制策略的有效性进行了验证。
1 负载转矩扰动对PMSM速度控制的影响分析
1.1 扰动模型的传递函数表达

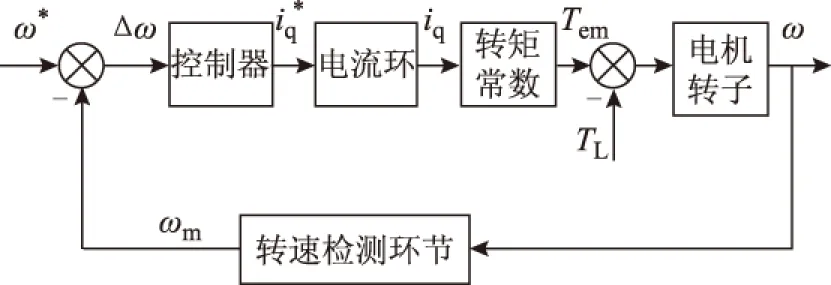
图1 PMSM速度控制框图Fig.1 Block diagram of PMSM speed control
图1中速度环控制器通常采用PI调节器;电流环、转速检测等环节相对于电机速度调节具有较高的响应速度,因此可将其近似等效为比例环节(电流环等效结果为电流反馈系数的倒数);电机转子环节可简化等效为积分环节,系数为转动惯量的倒数。由此可得到从负载转矩到输出转速的闭环传递函数,如式(1)所示。
(1)
式中,Kcf为电流环反馈系数,A-1;Kt为转矩常数,N·mA;Kv为速度环PI控制器比例系数;Tv为速度环PI控制器积分时间常数;J为转动惯量,kg·m2;Kvf为速度环反馈系数,rmin-1。令s=jω,进行系统频域分析,输入为负载转矩扰动,输出为电机转速。幅频特性表达式如式(2)所示。
(2)
式中,K0=KtKvKvf。
1.2 负载转矩扰动与PI控制参数间的关系
(3)
(4)
(5)
从式(4)可看出,幅频特性曲线峰值点对应的频率值与Kt、Kv、Kvf、J、Kcf和Tv等参数有关。因此,如要改变幅频特性峰值对应频率,可以对PI控制器的比例系数和积分时间常数进行调整。同时根据式(5)可知,幅频特性曲线的最大值可通过改变PI控制器的比例系数进行调节,增大PI调节器的比例系数Kv能够减小幅频特性曲线的峰值,从而在一定程度上抑制负载转矩扰动对伺服系统转速的影响。
针对式(2),图2所示的结果可以验证以上分析(其中仿真参数:J=0.000 324 kg·m2,Kt=0.68 N·mA,Kcf=1 305 A-1,Kvf=39 116.8 rmin-1)。图2中曲线1对应的参数为Kv=0.012 7,Tv=0.025;曲线2对应的参数为Kv=0.012 7,Tv=0.012 5;曲线3对应的参数为Kv=0.038 1,Tv=0.025。当Tv=0.025保持不变时,增大Kv,可以看出幅频曲线峰值明显减小,同时峰值对应的频率值也相应增大;当Kv=0.012 7保持不变时,减小Tv可以看出幅频曲线峰值几乎不变,但峰值对应的频率值增大,波峰整体右移。

图2 PMSM伺服系统负载扰动模型的幅频特性Fig.2 Amplitude-frequency characteristics of PMSM servo system disturbance model
由此可知,PMSM伺服系统对负载转矩扰动的转速响应与控制器参数的选择有关,通过动态调节速度环PI控制器的控制参数,可以实现对负载转矩扰动的全运行范围实时抑制。
2 PMSM速度控制策略的设计和实现
2.1 PI变增益策略的推导和设计
根据前面的分析可知,当PMSM伺服系统以负载转矩作为系统输入、转速作为系统输出时,系统的频域特性具有带通滤波器的特点:在式(4)所示的频率下,幅频特性曲线达到最大值,对应该频率的扰动分量会对转速造成最大的影响;远离该频率值,幅频曲线对应的幅值会逐渐减小,即扰动对于转速的影响也相应减小。设该频率值为ω0,负载转矩扰动中对应频率为ω0的信号分量将会被显著放大,影响电机转速响应。因此,可以通过检测转速中频率为ω0的信号分量的变化,将其作为PI控制器比例系数变增益的依据,以抑制负载转矩扰动的影响;此外根据式(4),为了确保比例系数变化的同时不会对目标频率ω0产生影响,也需要变化积分时间常数,以保证比例系数和积分时间常数的比值恒定。
转速信号中频率为ω0的分量的提取可以采用式(6)所示的带通滤波器实现。转速信号经过带通滤波器得到ωout,利用ωout可构造如式(7)所示的PI变增益控制策略。
(6)
(7)

通过计算ωout和ω*/k的比值,当负载转矩突变时,增大比例系数可以提高伺服系统的刚性,抑制扰动。
根据式(4),为了使幅频曲线峰值的对应频率在比例系数变化的同时能够保持不变,PI控制器的积分时间常数的变化规律如式(8)所示,目的是保证比例系数与积分时间常数的比值保持恒定,确保所设计的带通滤波器的有效性。
(8)
2.2 负载转矩的观测与补偿
进一步地,为了利用内环响应的快速性,可以考虑设计基于Kalman滤波器结构的负载转矩观测器,其中的关键问题是对负载转矩扰动进行实时观测和及时补偿。PMSM运动方程如式(9)所示。
(9)
式中,iq为q轴电流,A;B为黏性摩擦系数,N·m(rads);ω为机械角速度,rads;θ为机械角度,rad;Td为负载转矩TL和摩擦转矩Bω之和,即Td=TL+Bω,假设负载转矩TL在一个测量采样周期内是一个定值,即dTLdt=0,由此可得dTddt=d(Bω)dt。对式(9)进行离散化,Kalman滤波器可以设计为如下形式[17]。

(10)
式中,x为状态变量,x=[ω θ Td]T;u为输入信号,u=iq;y为测量信号,y=θ;w为系统噪声,主要包括系统模型和参数偏差;v为测量噪声,主要包括测量器件的量化误差。式(10)中系数矩阵为
Kalman滤波算法可分为观测量的递推运算和滤波增益矩阵的递推运算两部分,两者之间既有联系又相对独立,可以并行实现递推算法。
观测量的递推运算首先在已知k-1时刻的观测结果x(k-1)和输入信号u(k-1)的前提下,利用x(k)=Ax(k-1)+Bu(k-1),算出k时刻观测结果x(k)的预估值;然后由x(k)的预估值,利用y(k)=Cx(k),算出k时刻测量值y(k)的估计值,求出其与y(k)之间的偏差e(k),并与滤波增益矩阵K(k)相乘,得到x(k)预估值的修正值K(k)e(k);最后将x(k)的预估值和修正值K(k)e(k)相加,可得到x(k)。
滤波增益矩阵的递推运算首先根据式(11)求出x(k)估计值的误差协方差矩阵P1(k),然后根据式(12)求出滤波增益矩阵K(k),最后根据式(13)求出P(k)并储存,供下次使用。
P1(k)=AP(k-1)AT+Q(k-1)
(11)
K(k)=P1(k)CT[CP1(k)CT+R(k)]-1
(12)
P(k)=P1(k)-K(k)CP1(k)
(13)
式中,P(k-1)为x(k-1)的误差协方差矩阵;A为系统矩阵;Q为系统扰动矢量ω的协方差矩阵;R为测量噪声矢量v的协方差矩阵;C为测量矩阵。
在计算完成后,将观测出的转矩值Td转换成对应的电流量,对速度环控制器输出的电流环指令信号进行前馈补偿,可以和变增益PI控制器共同作用削弱负载转矩扰动带来的不良影响。
3 控制策略实现特性分析
3.1 PMSM伺服系统速度控制策略参数鲁棒性分析
变增益PI控制器和负载转矩观测器的建立都需要较为准确地获知伺服系统的参数,特别是负载转动惯量参数。由于在系统的运行过程中,负载转动惯量可能会发生一定范围的变化,因此需要针对这一因素,分析控制策略的参数鲁棒性。对于基于Kalman滤波器的负载转矩观测器来说,由于Kalman滤波器考虑了系统扰动,因此可以通过设置系统扰动矢量,一定程度上满足参数鲁棒性的要求。下面主要针对变增益PI控制分析其参数鲁棒性。

(14)
在PMSM伺服系统以负载转矩扰动作为输入时,式(14)可看作对应幅频特性曲线的带通宽度。由带通滤波器幅频特性可知,对数坐标下ω1、ω2关于ω0对称,可得式(15)。联立式(14)、式(15)可得ω1、ω2的表达式如式(16)所示。
(15)
(16)
若转动惯量发生变化,即J′=aJ,其中J为系统初始转动惯量,J′为系统当前实际的转动惯量,a为变化比例系数。转动惯量的变化将导致ω0、ω1、ω2的变化,结果如式(17)所示。
(17)

(18)式中,K为伺服系统闭环环路增益,K=KtKvKvf/(JKcf)。

3.2 负载转矩观测器实时性分析
通常,负载转矩观测器只有具备良好的实时性,才能实现对扰动的及时补偿。为了提高观测器的实时性,首先需要观测器具有较高的采样频率和较短的运算时间,以保证其在采样周期内能够完成一次观测运算。因此,本文采用FPGA对负载转矩观测算法进行硬件实现,一方面可以减轻伺服系统微处理器的计算负担;另一方面,根据前述分析,Kalman滤波算法的各推导步骤之间具有相对独立的特点,因此可针对这一特征借助FPGA并行实现观测器算法,进一步缩短运算时间。实现过程如图3所示。
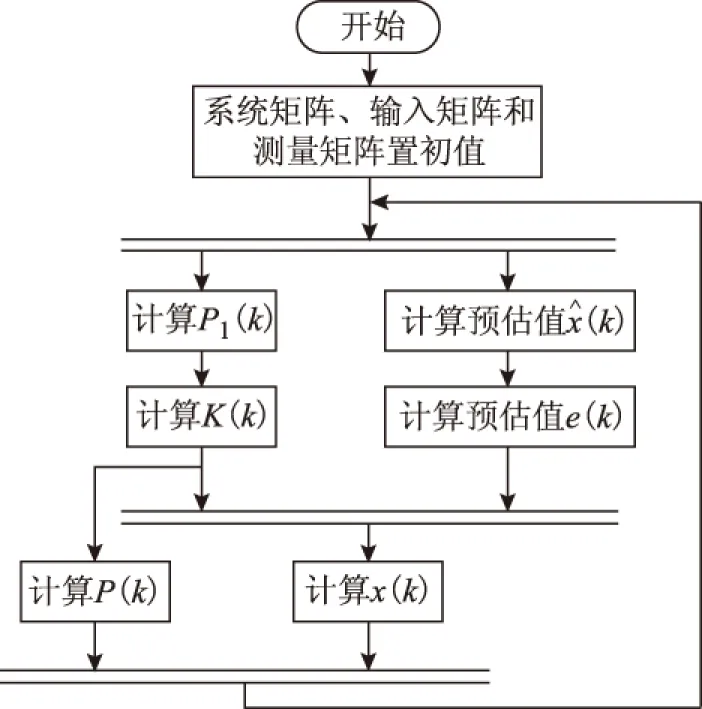
图3 负载转矩观测硬件实现流程Fig.3 Load torque observer hardware-based implementation flow chart
其次,为了提高观测器的实时性,需要适当提高观测器的收敛速度。由于Kalman滤波采用的是预测加修正的计算模式,观测器的收敛速度与迭代计算次数相关,也与每次计算的修正量有关,而每次计算得到的修正量与滤波增益矩阵K(k)有关。因此如果能够增大每次递推运算后得到的K(k)值,就能够加快负载转矩观测器的收敛速度[18,19]。虽然K(k)的推导需要大量的矩阵运算,但本文根据伺服系统的特点,对K(k)的递推过程做一定简化。将矩阵P1(k)、向量C=[0 1 0]代入式(12)可得式(19)。
(19)
式中,p12、p22、p32为矩阵P1(k)第二列的对应元素;R为测量噪声矢量的协方差矩阵,由于测量信号只有机械角度一个物理量,因此R为标量。
从式(19)可知,测量噪声越大,R就越大,导致K(k)的对应元素就越小,Kalman滤波的收敛速度就越慢;反之测量噪声越小,收敛速度就相对越快。因此提高位置反馈的分辨率、减小量化误差可以提高负载转矩观测器的收敛速度。
3.3 控制策略实现
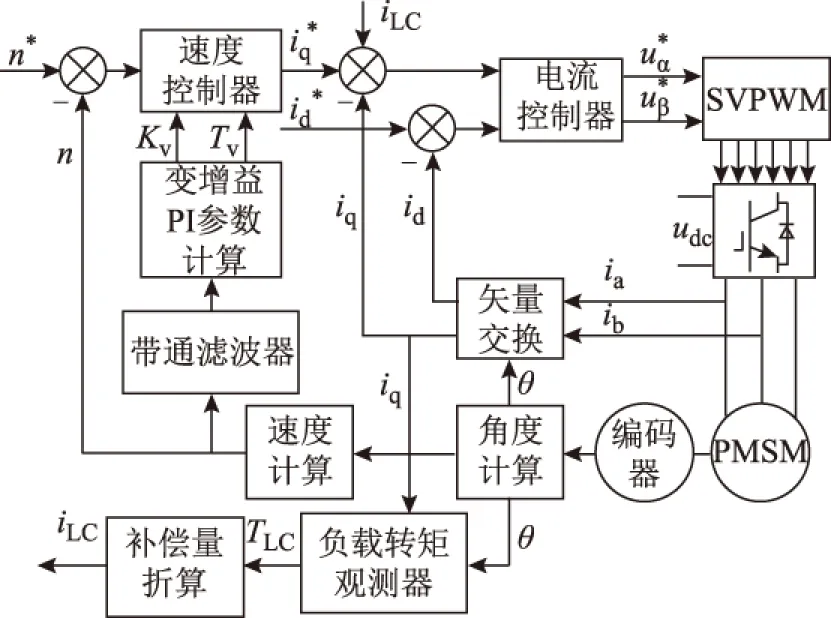
图4 PMSM速度控制方案框图Fig.4 PMSM speed control strategy diagram
4 实验结果与分析
根据图4所示的原理框图,系统控制部分主要由意法半导体公司的STM32F417ARM微处理器和Altera公司的EP4CE22FPGA组成,PMSM伺服系统实验平台如图5所示。其中ARM处理器主要负责伺服系统的位置信号采集、速度环控制、速度环变增益算法实现等功能;FPGA主要负责伺服系统电流信号采集、电流环矢量控制算法运算、负载转矩观测等功能。实验中电流环采样控制周期为50 μs,负载转矩观测器观测周期与电流环采样控制周期相同,速度环控制周期为100 μs。采用增量式编码器进行位置测量,编码器的分辨率为24 000 p/r,电机参数见表1。

图5 永磁同步电机伺服系统实验平台Fig.5 The test bench of the PMSM servo system

参数数值额定功率/W1000额定转速/(r/min)3000额定电流/A6.3静转矩/(N·m)4.3定子相电阻/Ω1.5定子相电感/mH4.2转矩常数/[(N·m)/A)]0.68电压常数/(V/1000r/min)45转动惯量/(10-4kg·m2)3.24极对数4
分别采用本文提出的控制策略以及传统PI控制方式对电机进行负载转矩突变实验。首先,系统输入阶跃转速指令,转速指令分别设为200 r/min、600 r/min和1 000 r/min;然后突加约2 N·m的负载转矩,实验结果如图6所示。可以看出,当电机运行在高速(1 000 r/min)、中速(600 r/min)和低速(200 r/min)下,应用本文所提出的负载转矩扰动抑制策略,不仅可有效减小负载转矩突变所产生的转速波动,而且可以缩短转速恢复时间,减小负载转矩扰动对伺服系统转速带来的不利影响。

图6 负载转矩突变情况下控制效果比较Fig.6 Control effect comparison under load torque mutation
转速波动期间(约5 ms),变增益PI控制器参数Kvg、Tvg的变化曲线如图7所示。初始比例系数Kv设置为13(定标为Q10),初始积分时间常数Tv设置为20 ms。随着转速波动的变化,变增益PI控制器的比例系数先增大后减小,同时为了保证比例系数和积分时间常数的比值恒定,积分时间常数也在相同的区间进行对应的变化。

图7 变增益PI控制器的参数变化曲线Fig.7 The variation curve of the parameters of VGPI
负载转矩观测器对负载转矩的观测结果如图8所示,观测结果中包含负载转矩和摩擦转矩两部分。从图8中可以看出,当负载转矩突然增大,负载转矩观测器在很短的时间内上升到2 N·m附近。从上升阶段的局部放大图中可以看出对于负载转矩突变信号,负载转矩观测器约用了2 ms实现了负载转矩的跟踪观测,其中受观测器递推运算以及输入信号的量化误差影响,负载转矩观测器结果存在一定偏差,但不会影响系统运行。

图8 负载转矩观测结果Fig.8 Observed load torque
为了验证控制策略的参数鲁棒性,分别采用不同的转动惯量值进行控制算法的设计和实验分析。在负载转矩发生突变时,转速的扰动响应如图9所示(取转速波动部分放大显示),可以看出转速响应特性基本一致,转动惯量在一定范围的变化不会对控制算法的有效性造成明显影响。

图9 参数鲁棒性测试Fig.9 The test of parameter robustness
5 结论
本文提出了基于实时负载转矩反馈补偿的永磁同步电机变增益PI控制方案,通过对PMSM伺服系统进行频域分析,设计了变增益PI控制器,弥补了固定控制参数实现方案的不足;同时设计并硬件实现了基于Kalman滤波的负载转矩观测器,对负载转矩扰动进行及时地观测补偿。实验证明,本文提出的控制策略能够有效抑制负载转矩扰动所带来的不良影响,具有较强的实时性和参数鲁棒性,便于工程实现与应用。
[1] 郑泽东,李永东,肖曦,等.永磁同步电机负载转矩观测器[J].电工技术学报,2010,25(2):30-36. Zheng Zedong,Li Yongdong,Xiao Xi,et al.Load torque observer of permanent magnet synchronous motor[J].Transactions of China Electrotechnical Society,2010,25(2):30-36.
[2] Liu Xing,Liang Deliang,Yang Xinning.Dynamic characteristics test of permanent magnet synchronous machine with sinusoidal torque load[C]//Ninth International Conference on Ecological Vehicles and Renewable Energies,Monte-Carlo,Monaco,2014:1-4.
[3] Zhao Shouhua,Chen Yangsheng,Mao Yongle.Adaptive load observer-based feed-forward control in PMSM drive system[J].Transactions of the Institute of Measurement and Control,2015,37(3):414-424.
[4] 刘英培,栗然,梁海平.基于最小二乘支持向量机优化自抗扰控制器的永磁同步电机直接转矩控制方法[J].中国电机工程学报,2014,34(27):4654-4664. Liu Yingpei,Li Ran,Liang Haiping.Direct torque control for permanent magnet synchronous motor based on active-disturbance rejection control optimized by least squares support vector machines[J].Proceedings of the CSEE,2014,34(27):4654-4664.
[5] Choi H H,Leu V Q,Choi Y S,et al.Adaptive speed controller design for a permanent magnet synchronous motor[J].IET Electric Power Applications,2011,5(5):457-464.
[6] Yu Jinpeng,Shi Peng,Dong Wenjie,et al.Neural network-based adaptive dynamic surface control for permanent magnet synchronous motors[J].IEEE Transactions on Neural Networks and Learning Systems,2015,26(3):640-645.
[7] 陆婋泉,林鹤云,冯奕,等.永磁同步电机无传感器控制的软开关滑模观测器[J].电工技术学报,2015,30(2):106-113. Lu Xiaoquan,Lin Heyun,Feng Yi,et al.Soft switching sliding mode observer for PMSM sensorless control[J].Transactions of China Electrotechnical Society,2015,30(2):106-113.
[8] Zhang Changfan,Jia Lin,He Jing.Load torque observer based sliding mode control method for permanent magnet synchronous motor[C]//25th Chinese Control and Decision Conference,Guiyang,China,2013:550-555.
[9] 易伯瑜,康龙云,陶思念,等.永磁同步电机抗扰高阶滑模观测器设计[J].电工技术学报,2014,29(5):132-140. Yi Boyu,Kang Longyun,Tao Sinian,et al.Design of robust high order sliding mode observer for permanent magnet synchronous motors[J].Transactions of China Electrotechnical Society,2014,29(5):132-140.
[10]王少威,万山明,周理兵,等.利用蚁群算法辨识PMSM伺服系统负载转矩和转动惯量[J].电工技术学报,2011,26(6):18-25. Wang Shaowei,Wan Shanming,Zhou Libing,et al.Identification of PMSM servo system’s load torque and moment of inertia by ant colony algorithm[J].Transactions of China Electrotechnical Society,2011,26(6):18-25.
[11]Lee K,Choy I,Back J,et al.Disturbance observer based sensorless speed controller for PMSM with improved robustness against load torque variation[C]//IEEE 8th International Conference on Power Electronics and ECCE Asia,Jeju,South Korea,2011:2537-2543.
[12]Li Shihua,Zhou Mingming,Yu Xinghuo.Disturbance observer based terminal sliding mode control method for PMSM speed regulation system[C]//30th Chinese Control Conference,Yantai,China,2011:6287-6292.
[13]Kim Hyun-Sik,Ko Jong-Sun.Experimental position control of PMSM using disturbance observer with system parameter compensator[C]//11th International Conference on Control,Automation and Systems,Gyeonggi-do,Korea,2011:1396-1401.
[14]Du Limin,Zhang Ke,Jin Guang.Linear auto disturbance rejection controller for vector controlled PMSM drive system[C]//International Conference on Transportation,Mechanical,and Electrical Engineering,Changchun,China,2011:879-882.
[15]Mechernene A,Chrifi-Alaoui L,Zerikat M,et al.VGPI controller for high performance speed tracking of induction motor drive[C]//Proceedings of the 3rd International Conference on Systems and Control,Algiers,Algeria,2013:472-477.
[16]秦忆,周永鹏,邓忠华,等.现代交流伺服系统[M].武汉:华中理工大学出版社,1995.
[17]Shi Tingna,Wang Zheng,Xia Changliang.Speed measurement error suppression for PMSM control system using self-adaption Kalman observer[J].IEEE Transaction on Industrial Electronics,2015,62(5):2753-2763.
[18]Yeh H G.Real-time implementation of a narrow-band Kalman filter with a floating-point processor DSP32[J].IEEE Transactions on Industrial Electronics,1990,37(1):13-18.
[19]Neto J V F,Farid J A,de Abreu J A P.QR-duality tuning of standard Kalman filter oriented to rocket velocity indirect measurement[C]//12th International Conference on Computer Modelling and Simulation,Cambridge,United Kingdom,2010:74-79.
Variable Gain PI Control Method for Permanent Magnet Synchronous Motor Based on Load Torque Feedback Real-Time Compensation
Guan Xin Li Yesong
(School of Automation Huazhong University of Science and Technology Wuhan 430074 China)
In order to reduce the effects caused by load torque disturbances,the frequency characteristics of permanent magnet synchronous motor(PMSM) servo system speed response model under load torque disturbance are studied.Based on the relationship between the speed fluctuation caused by load torque disturbance and the parameters of speed PI regulator,a variable gain PI(VGPI) control method for PMSM based on load torque feedback compensation is proposed.According to the variation of the specific frequency component of speed,the variable PI controller gain can be real-time modified in this control strategy.Meantime,a load torque observer based on Kalman Filter is designed and implemented by FPGA,which guarantees that the variation of load torque can be observed and compensated in real time.The capacity of load torque disturbance rejection of PMSM system is improved.Experimental results are given to verify the validity of the control scheme.
Permanent magnet synchronous motor(PMSM),load torque disturbance,variable gain PI (VGPI),load torque observer
国家科技重大专项项目资助(2012ZX04001- 022)。
2015-07-05 改稿日期2015-12-12
TM351
关 欣 男,1990年生,硕士研究生,研究方向为数字化交流传动控制系统。
E-mail:guanxin_hust@163.com(通信作者)
李叶松 男,1970年生,教授,博士生导师,研究方向为数字化交流传动控制系统、智能化控制以及现场总线网络化运动控制。
E-mail:hustysli@sina.com
猜你喜欢
北京航空航天大学学报(2022年6期)2022-07-02
防爆电机(2022年3期)2022-06-17
防爆电机(2021年2期)2021-06-09
防爆电机(2020年6期)2020-12-14
防爆电机(2020年4期)2020-12-14
北京航空航天大学学报(2020年10期)2020-11-14
北京航空航天大学学报(2017年6期)2017-11-23
制造技术与机床(2017年3期)2017-06-23
北京航空航天大学学报(2016年4期)2016-02-27
铁道科学与工程学报(2015年5期)2015-12-24
