基于改进式接受腔的肌电采集可行性方法研究
2017-01-04 12:24李彩萍穆广宁
河北工业大学学报 2016年2期
郭 欣,李彩萍,穆广宁
(河北工业大学 控制科学与工程学院,天津 300130)
基于改进式接受腔的肌电采集可行性方法研究
郭 欣,李彩萍,穆广宁
(河北工业大学 控制科学与工程学院,天津 300130)
针对从下肢残肢端不易记录高质量肌电信号的问题,提出了一种在接受腔内嵌入无线传感器采集肌电信号的实验方法.让健康受试者在穿戴定制的接受腔和未穿戴此装置的情况下,分别采集右侧下肢股直肌、阔筋膜张肌、半腱肌,股二头肌四块肌肉在5种典型行走模式下的表面肌电信息,并对肌电信号进行时域特征提取,构建特征向量,并采用阈值分割 SVM-KNN算法对五种行走模式进行识别,得出2种情况下的平均识别率,发现和目前研究领域健康人行走模式的识别率相接近,从而验证了嵌入无线传感器接受腔的可行性,然后把该嵌入无线传感器式接受腔应用于残肢肌电信号的采集上.
肌电信号;嵌入无线传感器式接受腔;识别率;可行性
0 引言
人体下肢的运动是在中枢神经系统的支配下通过身体肌肉收缩实现的,其具有较好的周期性和重复性.肌电信号最大的优点是大脑意识的反映,相比其他运动信息,其更能体现人的运动意图.因此,利用肌电信号识别人体步态已成为国内外研究的热点.而且,肌电信号采集的质量以及肌肉位置的选取直接影响识别结果的准确性[1].
对于单侧胫股截肢者而言,采集并记录其残肢端的肌电信号,可以显示非常丰富的神经肌肉信息,这对临床评估和智能假肢控制具有重要意义.比如,在临床上,已知残肢肌肉激活模式,有利于高效地评估下肢截肢者的步态[2].
记录高质量的肌电信号对智能假肢控制是非常必要的[2].但是,从膝上截肢者的残肢端获取可靠的肌电信号,研究者和临床医生面临重大的挑战,在接受腔中插入传感器可能产生大面积的压迫和与残肢间的摩擦,在行走时会引起不适;一些减轻摩擦和压力的方法又可能会导致接受腔松弛,使在正常步行期间,残肢在接受腔内活动,在肌电信号记录的过程中引起严重的运动伪迹,由于电极的不连续接触会导致肌电数据的丢失[2].为了解决这些问题,已有学者为截肢受试者设计了嵌入无线传感器式接受腔,在保证舒适度的前提下,从残肢采集一些高质量的肌电信号,其中采集设备为美国Delsys公司开发的无线传感器Trigno Wireless EMG.
本文将模拟截肢受试者穿戴假肢时的情境,为健康受试者定制类似的嵌入无线传感器式接受腔,可以仿真截肢者行走时的承重以及受力情况,采集穿腔与不穿腔在5种典型路况下不同肌肉的肌电信号,然后分析得到穿腔采集的肌电信号对后续的识别不造成影响,最后验证利用此嵌入无线传感器式接受腔从残肢侧获取高质量肌电信号的可行性.
1 设计嵌入无线传感器式接受腔
上述提到的为健康受试者定制的嵌入无线传感器式接受腔得到了国家康复辅具研究中心的认可和支持.实验选取一名男性健康受试者,其无下肢关节损伤(开放性和闭合性)、无心血管疾病、无皮肤过敏、无肌肉骨骼等病史,年龄24岁,身高182 cm.定制的嵌入传感器式接受腔如图1所示.为健康受试者右腿制作嵌入无线传感器式接受腔的过程为:
1)根据sEMG信号的强弱来确定所选取肌肉的位置,并做标记;
2)为上述无线传感器做模型;
3)将做好的传感器模型放在标记点处;
4)用保鲜膜将受试者的腿缠住,并用石膏绷带取型;
5)取型之后进行固化,取模;
6)将模型进行热缩成型;
7)受试者试穿成型接受腔;
8)根据试穿后的舒适程度进行修型,调整;
9)受试者穿戴定制好的接受腔.
2 信号采集与分析
2.1 肌电信号的采集
在实验之前,健康受试者了解整个实验流程,确保其正确理解实验操作.受试者需要剃去股直肌、阔筋膜张肌、股二头肌以及半腱肌4块肌肉肌腹位置的体毛,然后用酒精打磨相应的位置以去除角质层,以便更好地采集肌电信号.

图1 定制的嵌入传感器式接受腔Fig.1 Customed socketw ith sensorembedd
在穿戴如图1所示的接受腔时,先把DELSYS无线传感器放入腔内的相应位置,传感器的箭头与肌纤维方向平行,然后用橡皮泥把之间的缝隙进行填充,保证无线传感器与皮肤充分接触.受试者在进行实验前,充分熟悉动作要领,进行2~3次熟悉性操作.在测试者的指导下,受试者在平地、上楼梯、下楼梯、上坡、下坡5种模式下进行实验,实验共分为2次进行,隔一天实验一次.每次每种模式采集10组数据(即股直肌、阔筋膜张肌、半腱肌、股二头肌的肌电信息),每采集5组数据,受试者休息5分钟,放松腿部肌肉,防止产生肌肉疲劳,影响信号质量[3].其中,每种行走模式下受试者都是先迈对侧脚(即左脚),完成3个完整的步态周期.交替上、下楼梯时,每次实验过程都是6个台阶,每个台阶的高度为广泛应用的15 cm;在上、下坡时,均为无障碍通道的坡,斜坡长均为3.6 m,坡的角度大约为16°.在数据采集过程中,EMG智能传感器和Trigno基站之间通过Zigbee模块进行无线通信,Trigno基站与电脑之间则通过USB2.0接口实现数据传输.
同样,健康受试者在不穿戴接受腔时,首先确定与之前实验相对应的4块肌肉的位置,然后使用与银质检测条匹配的双面胶将传感器固定在清理好的皮肤处,实验分为3次进行,隔一天实验一次,每次每种模式采集10组数据.其他实验条件均相同.
2.2 肌电信号的处理
由于采集的肌电信号是由许多不同频率的正弦波组成的,其正相值和负相值得加和应该趋于零[4].肌电信号十分微弱,一般仅有1~10mV左右,有用信号分布在1~500 Hz频率范围之间,主要能量分布在50~150Hz频率范围内.通常,由体表直接检测到的肌电信号混有工频干扰、基线漂移、环境噪声、运动干扰等多种噪声信号,严重影响肌电信号的质量[5].为了提高表面肌电信号的信噪比,抑制噪声,需对肌电信号进行预处理,利用巴特沃斯滤波器提取20~450Hz的肌电信号,并利用陷波器陷去50 Hz及其倍频干扰信号.图2为受试者穿腔下坡过程采集到阔筋膜张肌原始sEMG以及预处理之后的sEMG.可以看到处理后大量的噪声被去除掉,更利于后续信号的分析.
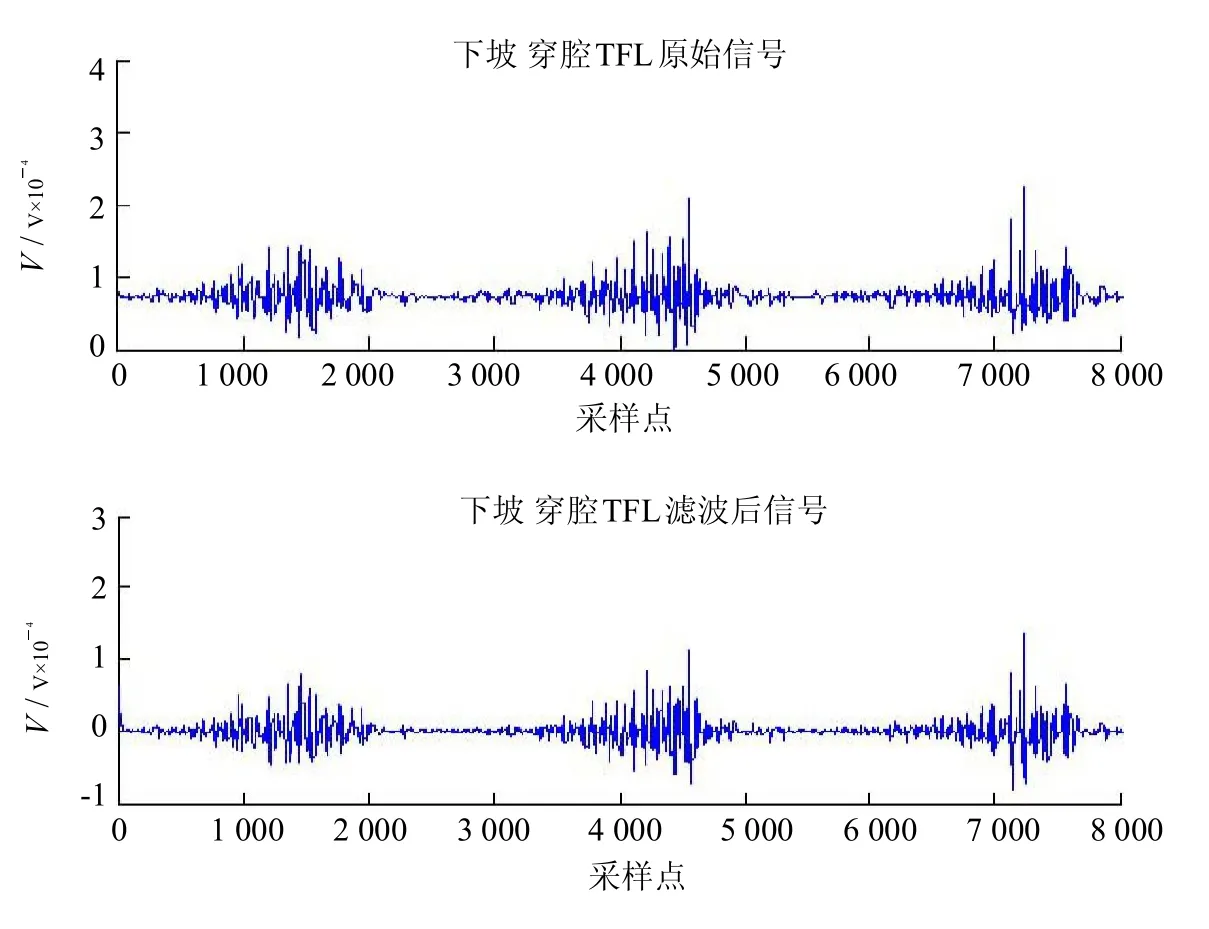
图2 穿腔下坡时TFL原始信号以及滤波之后的信号Fig.2 Originaland filtered signalsw ith the socket-sensor for downslop
2.3 肌电信号特征提取
2.3.1 特征提取
特征提取是从信号中提炼出最能表征信号特点的成分,可以看成是高维数据空间到低维数据空间的一种映射.特征提取作为模式识别中的关键环节,直接影响系统识别能力.表面肌电信号的特征提取就是提取最能表征肌电信号固有特性的数据,尽可能达到不同动作提取的特征区别较大,差异明显[6].
特征提取的方法主要有时域法、频域法、时频结合、高阶谱和混沌与分形等方法,本文选用计算简单,明了直观的时域法.本文选取适合用于人体行走模式识别研究的时域特征值.由于信号平均值(MEAN)表示一段表面肌电信号的平均强度,也能体现出肌肉的动作强度;均方根(RMS)能够反映信号的平均功率,同时也可以用来衡量表面肌电信号的功率,代表了能量信息,在一定程度上体现了各块肌肉组织在动作完成过程中的贡献[7];标准偏差(STD)是一种量度数据分布分散程度的标准,用以衡量数据值偏离算术平均值的程度[8].因此,在这里选择平均值、均方根、标准偏差3个特征向量用于人体行走模式识别的研究.
2.3.2 构建特征向量
由于平均值、均方根在不同路况下区分较为明显,标准偏差可以较好的识别上楼梯和上斜坡.所以,最终选4块肌肉表面肌电信号的平均值、均方根和标准偏差作为特征值,构建特征向量如下.

肌肉顺序依次是半腱肌、股直肌、阔筋膜张肌、股二头肌.
分别对受试者穿腔和不穿腔时所采集到的4块肌肉不同行走模式下全部进行特征提取后,随机选取每种模式下一组特征向量进行比较.如图3所示,分别为受试者未穿腔时以及穿腔时不同模式特征向量对比.
如图3所示,在穿腔与未穿腔的情形下,每一种模式下的特征向量都不会发生质的变化,只是在一定的小范围内波动.即:无论是否穿腔,平地模式下特征向量的每个元素值都偏小,上楼梯和上坡模式下的特征向量元素都偏大,下楼梯和下坡模式下特征向量的每个元素的幅值介于上述二者之间.
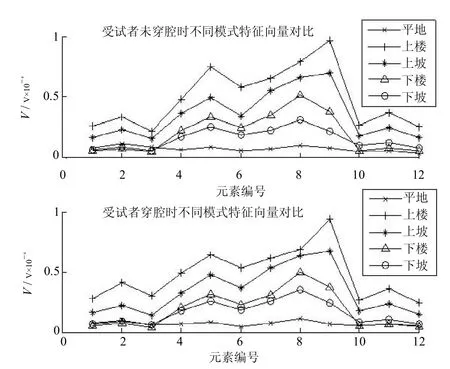
图3 受试者未穿腔时以及穿腔时不同模式特征向量对比Fig.3 The comparison of featurevector in differentpatternsw ith orw ithoutsocket
3 基于阈值分割的SVM-KNN算法
支持向量机利用核函数的非线性变换将线性不可分低维输入映射到高维特征空间,在高维空间寻找一个最优超平面使得相距最近的两类样本的距离最大[9].K近邻算法分类时,自待测样本开始生长,扩大区域直至将k个训练样本包含,训练样本中出现次数最多的类别即为待测样本的类别.SVM对距离分类平面较远的样本分类,结果置信度高,但是对于距离分类平面很近的样本,置信度降低导致出错概率大大增加;KNN方法依靠临近样本,对交叉类域或有重叠的样本分类更有优势[10].综合2种算法优势,对SVM分类结果的置信度设置阈值,采用基于阈值分割的SVM-KNN算法进行识别.
1)选用RBF高斯径向基核函数,采用一对一法,构建10个SVM子分类器,则每个子分类器的最优超平面的分类函数为

2)每个待分类样本将得到10子分类器的判定结果和决策值,利用投票选举方法,得票最多的类别即为此待分类样本所属类别,利用如下公式确定此分类结果的置信度

4 实验结果及分析
实验共获取750组特征向量样本,其中未穿戴接受腔450组,穿接受腔300组.随机选取未穿腔时150组样本的特征向量作为训练集对基于阈值分割的SVM-KNN分类器进行训练,其中每种模式随机选取30组.将训练好的分类模型对剩余600组样本的特征向量组成的测试集进行测试,其中穿腔与未穿腔时平地、上楼、下楼、上坡、下坡各60组.其中,把剩余未穿腔的300组样本记为A组,把穿腔的300组样本记为B组.实验针对股直肌、股二头肌、阔筋膜张肌、半腱肌4块肌肉的组合进行特征提取和识别.本文以混淆矩阵M表示实际类别和预测类别之间的联系,定义如下
式中元素意义如下

表1列出了A、B 2组的混淆矩阵,表征数据样本实际类别和预测类别之间的联系.如图4为识别结果对比图.
表1、两组识别率的混淆矩阵Tab.1 The confusionmatrix ofandin recognition rate
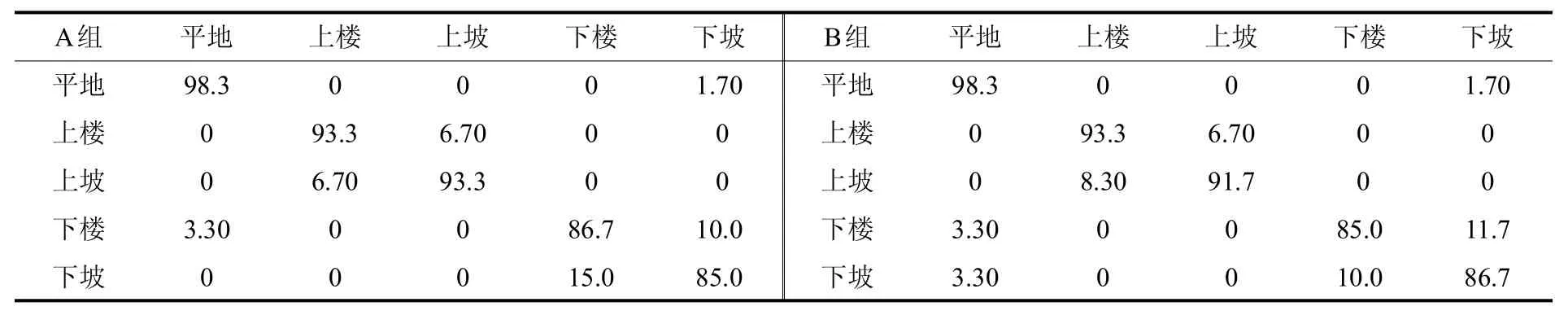
表1、两组识别率的混淆矩阵Tab.1 The confusionmatrix ofandin recognition rate
A组 平地 上楼 上坡 下楼 下坡 B组 平地 上楼 上坡 下楼 下坡平地 9 8 . 3 0 0 0 1 . 7 0 平地 9 8 . 3 0 0 0 1 . 7 0上楼 0 9 3 . 3 6 . 7 0 0 0 上楼 0 9 3 . 3 6 . 7 0 0 0上坡 0 6 . 7 0 9 3 . 3 0 0 上坡 0 8 . 3 0 9 1 . 7 0 0下楼 3 . 3 0 0 0 8 6 . 7 1 0 . 0 下楼 3 . 3 0 0 0 8 5 . 0 1 1 . 7下坡 0 0 0 1 5 . 0 8 5 . 0 下坡 3 . 3 0 0 0 1 0 . 0 8 6 . 7

图4 单侧膝上截肢受试者的嵌入式传感器接受腔Fig.4 The socket-sensor configuration of unilateralabove-kneeamputee
通过表1可以计算得到,A组的平均识别率为91.3%,B组的平均识别率为91.0%.也就是说,A组在300组样本中识别正确的组数为274组,而B组在300组样本中识别正确的组数为273组.实验结果表明,在只考虑4块大腿肌肉的情形下,A,B 2组的平均识别率都达到了91%以上.目前,有研究表明用基于阈值分割的SVM-KNN分类算法,对健康受试者下肢大腿4块肌肉的特征向量进行识别,其识别率达到94%[10].本实验过程,由于对肌肉种类的选取受到了一定的限制,所以和目前的研究水平还是有一点差距,但是在穿戴定制接受腔和不穿戴的情况下,对不同行走模式的平均识别率基本一致,都达到了91%以上.由此可知,健康受试者在穿戴嵌入式传感器接受腔之后,对行走模式的识别率不造成影响.因此,该嵌入式传感器接受腔可以用于采集膝上截肢患者残端的肌电信息.
5 应用
通过上述分析,可以得到穿戴该嵌入式传感器接受腔不会对后期的分析识别造成影响.因此,将嵌入式传感器接受腔应用于膝上截肢患者.首先选取一位膝上截肢受试者,其穿戴假肢的时长为6年,在穿戴假肢时,可以稳定地行走,包括平地、上下楼、上下坡.与健康受试者制作嵌入式传感器接受腔的过程基本一致,为该膝上截肢受试者定制了嵌入式传感器接受腔,所选取的肌肉种类和数量相同,并安装到其假肢上.
同样,对于该截肢受试者在进行实验前,充分熟悉动作要领,进行2~3次熟悉性操作.在同样的实验条件下,采集其穿戴假肢时5种典型行走模式下的肌电信号.其中采集信号分3次进行,隔天1次,周一、周三、周五上午各1次,每次实验采集每种行走模式各10组数据,为防止肌肉疲劳,每采集五组数据受试者休息5分钟,每组数据同样也是完成3个完整的步态周期.对已获取的肌电信号进行滤波、特征提取、构建特征向量、用上述SVM-KNN算法对步态进行识别.也是就是说,实验共获取截肢受试者450组特征向量样本,随机选择150组数据样本作为训练集对基于阈值分割的SVM-KNN分类器进行训练,其中每种模式随机选取30组.以平地行走的识别为例,训练好的分类模型对平地剩余60组平地特征向量样本组成的测试集进行测试,最终发现对平地行走模式的识别率为81.7%.即:在60组平地特征向量样本中,有49组样本识别正确.由于截肢患者本身的肌肉会有损伤和移位,其识别率和健康受试者有一定的差距,但是对于截肢患者来说,此识别结果还是比较满意的.Huang He等人已经证实该嵌入传感器式接受腔可以满足用户舒适的需求,在此验证了此装置在采集肌电信号的可用性.在以后的探索中,还可以选择增加或改变肌肉的种类,寻找更精确的肌肉位置,从而达到更高的识别率,为控制智能假肢奠定坚实的基础.
6 结论
主要了阐述健康受试者穿戴嵌入传感器式接受腔与未穿戴接受腔时肌电信号的采集、处理、分析对比以及模式识别,然后应用到膝上截肢受试者.通过为正常人定制嵌入无线传感器式接受腔,验证穿戴此接受腔对后续分析和识别无不利影响.即:穿戴此装置不会引起肌电信号质上的变化.因此,若想从残肢端采集到理想的肌电信号,从信号的质量、用者的舒适程度以及可用性而言,可以通过对截肢受试者定制上述的嵌入无线传感器式接受腔.
[1]LIZ J,WANG B C,Y CG,etal.sEMG-Based Joint Force Control for an Upper-Limb Power-AssistExoskeleton Robobt[J].IEEE Journalof Biomedicaland Health Informatics,2014,18(3):1043-1050.
[2]Hefferman GM,Zhang F,Nunnery M J,etal.Integrationofsurfaceelectromyographic sensorsw ith the transfemoralamputeesocket:A comparison of four differing configuration[J].Prostheticsand Orthotics Internation,2015,39(2):166-173.
[3]赵丽娜,刘作军,苟斌,等.基于隐马尔科夫模型的动力型下肢假肢步态预识别 [J].机器人,2014,36(3):337-341.
[4]刘秀云.基于EMG-KJA神经肌骨动力学模型的下肢动作模式识别及运动轨迹预测 [D].天津:天津大学,2012.
[5]De LucaCJ,Gilmore LD,Kuznetsov M,etal.Filtering thesurfaceEMG signal:movementartifactandbaselinenoisecontamination[J].Biomech 2010,43(8):1573-1579.
[6]ZHANG F,HUANGH.SourceSelection forReal-TimeUser IntentRecognition Toward VolitionalControlof Artificial Legs[J].IEEEBiomedical and Health Information,2013,17(5):907-914.
[7]Telfer S,AbbottM,Steultjens M,etal.Dose-response effectsof custom ised footorthoseson lower limbmuscle activity and plantar pressures in pronated foot type[J].GaitPosture2013,38(3):443-449.
[8]陈玲玲,杨鹏,耿艳丽,等.基于肌电信号的膝关节力矩识别方法 [J].中南大学学报:自然科学版,2013,44(2):117-121.
[9]苟斌,刘作军,赵丽娜,等.基于相关性分析的下肢假肢步行模式预识别方法 [J].东南大学学报:自然科学版,2013,43(S1):192-196.
[10]温倩.基于表面肌电信号的人体行走模式识别 [D].天津:河北工业大学,2015.
[责任编辑 代俊秋]
The study on the feasibility of the socket-sensor experimentalmethod
GUO Xin,LICaiping,MU Guangning
(Schoolof ControlScienceand Engineering,HebeiUniversity of Technology,Tianjin 300130,China)
Since itis difficult to record high-quality and reliable sEMG(surface electromyographic)signals from lowerlimb amputees,an experimentalmethod of recording sEMG signals from w ithin the sockets of lower-limb amputees is proposed to solve the problem.In this paper,firstly,select lower limb muscle group,including rectus femoris(RF), tensor fasciae latae(TFL),sem itendinosus(SEM)and biceps femoris(BF),thenmakeaspecialsocket-sensorconfiguration for the healthy subjectand collectsEMG signals of the five typicalwalking patternsw ithin orw ithout the socket-sensor configuration.The issueextracted timedomain featureofsEMG atthebeginning ofagait,use the SupportVectorMachine-K NearestNeighbor(SVM-KNN)algorithm based on threshold segmentation and recognized walking pattern.Finally, compareand analyze the rateof recognition,which isclose to the levelin the research field of recognition forwalking patterns.Sowe can know thatcollecting sEMG signals from socket-sensor configuration isvery feasible for lower-limb amputee.
sEMG;socket-sensor configuration;rateof recognition;feasibility
TP391
A
1007-2373(2016)02-0017-06
10.14081/j.cnki.hgdxb.2016.02.003
2015-09-18
国家自然科学基金(61203323);中国科学院人机智能协同系统重点实验室课题开放基金
郭欣(1976-),男(汉族),教授,博士.
数字出版日期:2016-04-26 数字出版网址:http://www.cnki.net/kcms/detail/13.1208.T.20160426.1557.020.htm l
猜你喜欢
九江职业技术学院学报(2022年1期)2022-12-02
疯狂英语·新读写(2022年5期)2022-11-22
保定学院学报(2022年2期)2022-04-07
成都信息工程大学学报(2021年4期)2021-11-22
科技传播(2019年24期)2019-06-15
中国生殖健康(2019年3期)2019-02-01
许昌学院学报(2018年4期)2018-05-02
北京航空航天大学学报(2017年9期)2017-12-18
中华建设(2017年1期)2017-06-07
汽车电器(2014年8期)2014-02-28