
图像裁剪技术在机器视觉系统中的应用*
2017-01-06 01:49何隽
通化师范学院学报 2016年12期
何隽
(江阴职业技术学院,江苏无锡214405)
图像裁剪技术在机器视觉系统中的应用*
何隽
(江阴职业技术学院,江苏无锡214405)
“电力电缆故障检测机器人”是一套基于Mini6410开发板开发设计的,电力公司用于监测电缆坑道及电缆故障的产品,该产品的实时性不仅取决于硬件的性能,还依赖于图像传输的速度.为了提高图像传输的速度,将多媒体技术中的图像裁剪技术应用于图像的后期处理中,在不影响图像质量的前提下,减小图像的存储空间,从而提高该产品的实时性.
Mini6410;WiFi;S3C6410;USB摄像头;图像裁剪
目前电力公司在铺设地下电缆前在坑道内铺以不少于100mm的软土或砂层,然后检查软土或砂层的表面是否达到铺设电缆的要求,例如检查是否存在尖角砂石,是否有巨石等等情况.目前这些工作均是人工完成的,由于铺设的坑道比较狭小,给检查工作带来了的一定的难度;当对埋在地下的电缆进行检查或者是对出现破损的电缆进行故障排除时,人进入狭小的电缆坑道检查电缆是无法实现的.
为了解决以上问题,用于电力电缆故障检测的机器人应运而生,该机器人能够代替人在电缆坑道内运动,快速地将电缆坑道内的环境,如电缆表面的情形,以及坑道内砂石的铺放情形,拍摄成图像,并通过无线WiFi[1]传送给地面上的操作人员;操作人员可以通过机器人传送回来的图像,判断坑道是否满足铺设电缆的条件或者定位破损电缆出现在何处.
“电力电缆故障检测的机器人”要实时将图像传送给操作人员,让操作人员第一时间得到地下坑道内的情况,根据机器人回传的图像做出及时的处理.实时性是该产品的一个重要性能指标,提高该产品的实时性,不仅依赖于硬件的性能,还决定于图像的大小,在保证图像质量的情况下,如何减小图像的存储空间成为研究的重点.
1 系统硬件设计
电力电缆故障检测的机器人由两部分构成,一部分是用于深入电缆坑道内进行图像拍摄的“电力电缆故障检测机器人”;一部分是用于遥控指挥机器人的控制台.控制台的主要功能是与“电力电缆故障检测机器人”通信,向其发送运动指令和接收图像并显示.“电力电缆故障检测机器人”应具备的功能是:
①能够在电缆坑道内进行运动.
②采集清晰的视频图像.
③与控制台进行通信,接收控制台的指令.
④实时上传视频图像.为了完成以上的功能,硬件的设计要解决的技术要点是:通信方式的选择;运动机构的设计;图像拍摄设备的选择.如图1所示,采用3个轮子的轮式运动机构,包括1个支撑轮和2个动力驱动轮[2].运动装置采用步进电机驱动.核心控制机构选用友善之臂的Mini6410开发板,鉴于以下两点考虑,既支持WiFi通信又支持USB摄像头.操作系统采用Linux操作系统.
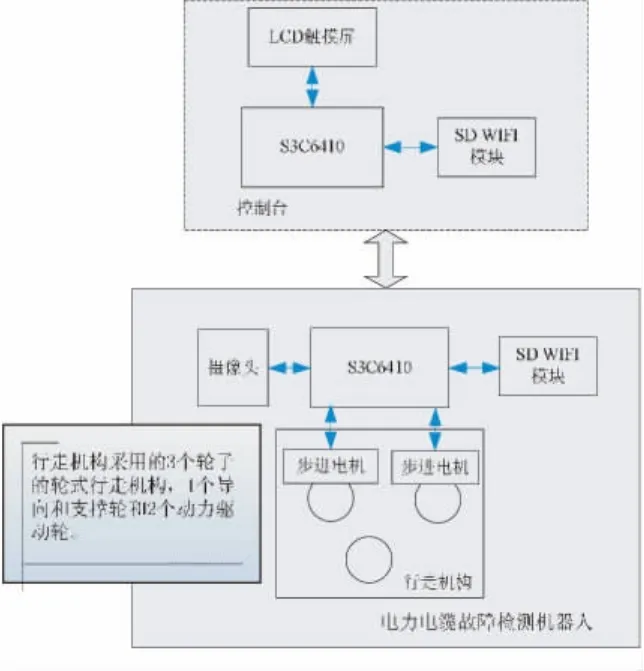
图1 机器人与控制台硬件结构图
Mini6410以ARM11芯片(三星S3C6410)作为主处理器的嵌入式核心板,带有2路SDIO接口,其中SDIO0通常被用作普通SD卡使用;另一路SDIO接口通过CON11针座引出,该接口中还包含了1路SPI,2个GPIO,SD WiFi Module.为了达到良好的人机交互效果,本文选取一块4.3寸、具有触摸功能的LCD显示屏,监控人员不仅可以通过LCD屏查看当前系统的运行状态,而且还可以向其发送控制指令;由于Mini6410开发板集成摄像头模块,支持CMOS摄像头和USB摄像头[3],本文选取USB摄像头作为图像捕获的设备.
2 图像处理
“电力电缆故障检测机器人”的摄像头选择的是中微星摄像头(USB接口),在Mini6410内核裁剪过程中,通过配置Multimedia device下的Video for Linux,让内核支持 USB接口和 OV511芯片,对OV511芯片的驱动程序进行修改,既对kernel/driver/usb目录下的OV511.c这个文件进行修改,用于设置摄像头拍摄图片的大小和拍摄图像的格式[4].根据本系统的应用环境,将图片大小设置为320× 240,图片格式设为JPEG格式.
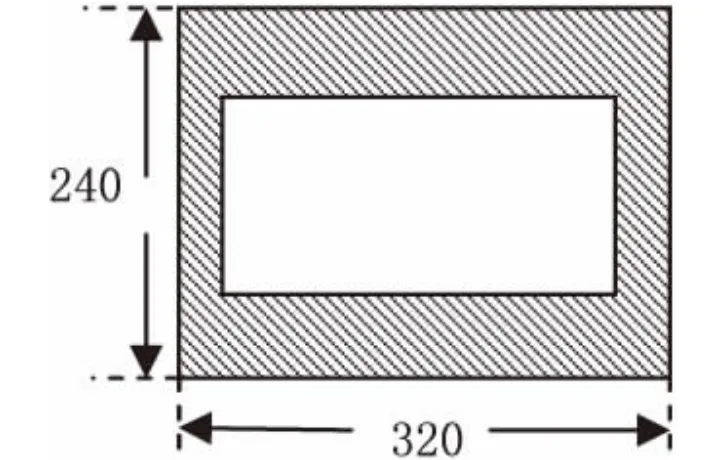
图2 图像剪裁区域图
为了实现图像的实时传送,提高网络传输速度,必须在图像传输之前对传输的图像进行处理,如剪裁图像,去除无用的部分.由于本系统的应用环境是电缆坑道内,摄像头拍摄到的图像有用的部分是电缆部分,而坑道周边环境部分的图像是无用的.如图2所示,斜线标示的是无用的部分.经过对大量拍摄图片的分析和实验,裁剪标准为:高和宽均截取为原长度的2的指数倍.
控制台图形界面采用的是编程Qtopia/Qt4,对图像的处理流程如图3所示.摄像头捕获的图像是320×240的JPEG格式的图像.对这幅320×240的JPEG的图像进行裁剪,得到新的图像new Image,裁剪的原则是截取原长、宽的2的指数倍[5],裁剪后的图像为256×128的图像.
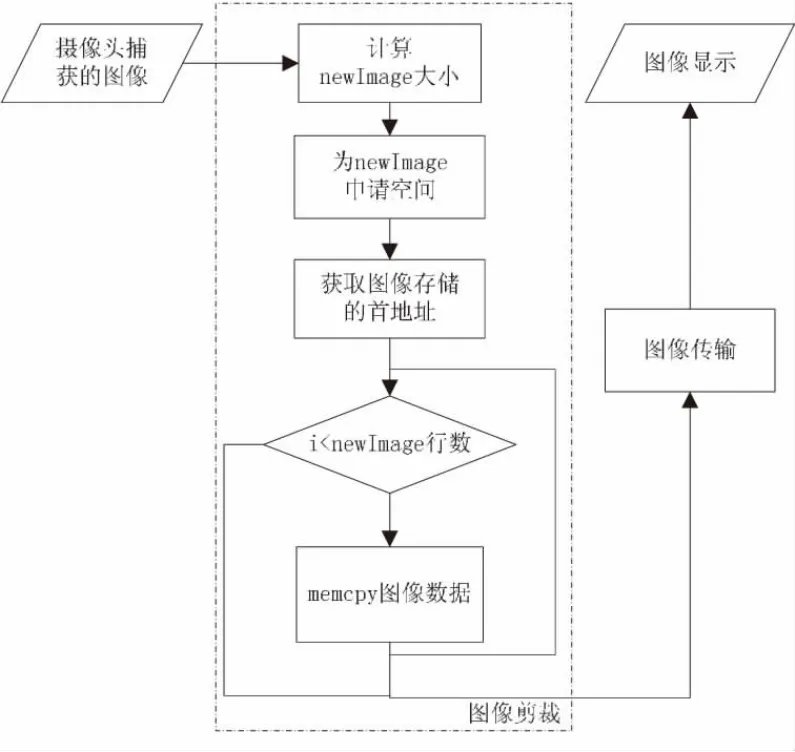
图3 图像处理流程图
由于一个JPEG文件中,不仅包含图像的压缩数据,还有文件的大小、色彩等信息,JPEG文件以数据段为单位来组织所有的文件内容.一个段的长度不大于65535,每个段是由段标识符、段长度和段内容组成的.JPEG文件格式使用MtorOla格式,对一个字的存储而言,低字节存放的是高位数,高字节存放的是低位数,即高字节在前,低字节在后.段标识符又叫标记码,标记码由两个字节构成,前一个字节是固定值OxFF,而第二个字节是非0字节和OxFF.每个标记之前还可以添加任意数目的OxFF填充字节[6].
QImage图像的数据是以字节为单位保存的,每一行的字节数必须是4的整数倍,不足的补0.W是图像的宽度,bitcount是图像的位深,即32、24等,计算得到的W是程序中图像每行的字节数.图像格式包括 QImage::Format_RGB32,QImage::Format_ RGB888,QImage::Format_Indexed8.以行为单位,进行行拷贝,将image图像相应的部分依次拷贝到ne-
3 实验结果
摄像头拍摄的原图像,发送给客户端,在Mini6410开发板上LCD触摸屏上的显示效果如图4所示,图片的大小为320×240,空间大小为12KB.
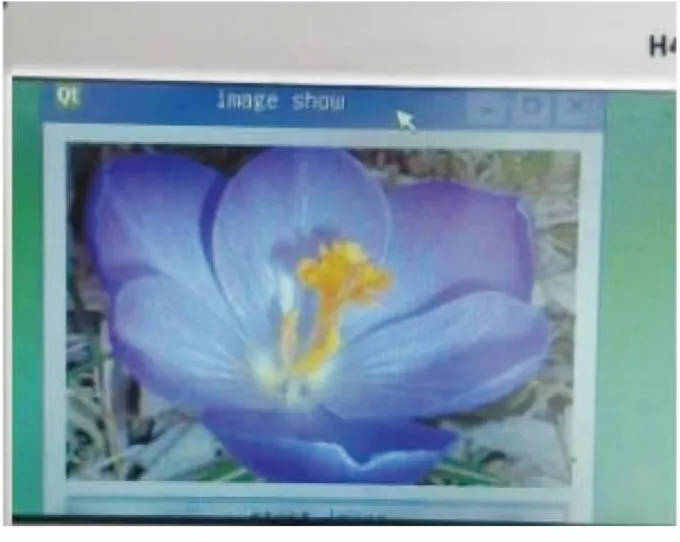
图4 裁剪前的图
经过以上方法,对图像进行剪裁,图像大小变为256×128,空间大小变为8KB,显示效果如图5所示,虽然对图像进行了剪裁,但是并不影响“电力电缆故障检测机器人”检测的效率,因为图像中去掉的部分不包含有用的信息,是电缆的周边环境信息.每幅图像的空间大小减小4KB,大大提高了图片发送的速度,提升了“电力电缆故障检测机器人”的实时性,从而提高了该产品的性能可靠性.
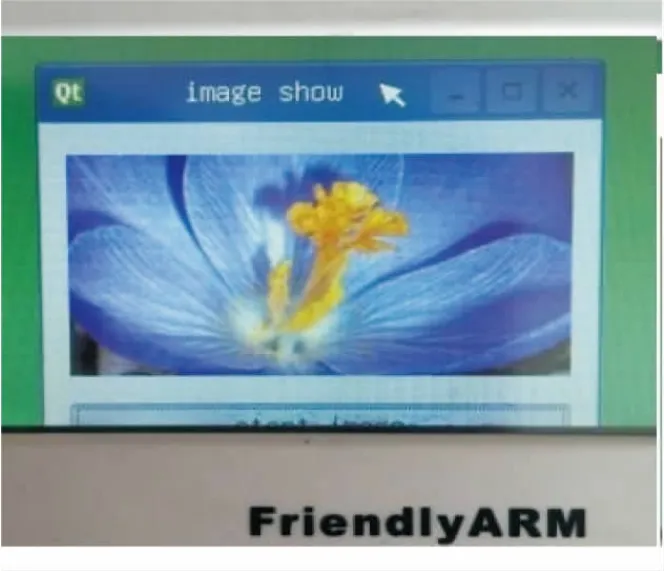
图5 裁剪后的图
4 结束语
可靠性、稳定性、实时性良好的“电力电缆故障检测机器人”是电力企业的真正需要,由于嵌入式系统体积小、系统资源有限等特点,要尽量减小不必要的开销.“电力电缆故障检测机器人”是嵌入式系统在机器视觉方面的一个应用,在控制台与机器人之间要大量地传送图像,因此减小图像传输开销,成为提高产品实时性、可靠稳定性的一个重点.实验验证,经过对图像进行裁剪,大大减小了图像的空间大小,变为原图像的66.7%,大大提高了“电力电缆故障检测机器人”的性能.
[1]龚若皓.基于嵌入式移动GPU的图像编解码并行优化[D].成都:西南交通大学,2015.
[2]谭苗苗.面向环境检测的小型轮式机器人循迹控制研究[J].机械工程师,2016(2).
[3]Tiny6410硬件手册-20110805[R].
[4]张欢庆.基于ARM处理器的嵌入式Linux系统关键技术研究[D].济南:山东师范大学,2013.
[5]李飞.基于移动终端的图像文字识别系统的研究及实现[D].长春:长春工业大学,2015.
[6]刘小军.基于WiFi无线视频传输技术的研究[J].电子技术,2012(10).
(责任编辑:王前)
TP39
A
1008-7974(2016)06-0004-03
10.13877/j.cnki.cn22-1284.2016.12.002
2016-07-04
江苏省现代服务业信息融合软件工程技术研究开发中心项目“图像识别技术在智能监控系统中的应用研究”(SR-2013-01)
何隽,女,江苏江阴人,讲师.
猜你喜欢
党史博览(2020年9期)2020-10-27
环球时报(2019-01-10)2019-01-10
电子制作(2017年7期)2017-06-05
北京航空航天大学学报(2017年12期)2017-04-23
电子技术与软件工程(2016年22期)2016-12-26
山东工业技术(2016年15期)2016-12-01
电子制作(2016年21期)2016-05-17
通信电源技术(2016年4期)2016-04-04
铁路通信信号工程技术(2014年5期)2014-02-28
