
自动上下料机械手臂设计
2017-01-10 03:40陈志雄
时代农机 2016年8期
陈志雄
(湖北职业技术学院,湖北 孝感 432000)
自动上下料机械手臂设计
陈志雄
(湖北职业技术学院,湖北 孝感 432000)
目前,我国的制造业正在迅速发展,越来越多的资金流向制造业,越来越多的厂商加入到制造业。本机械手主要与数控铣床组合最终形成生产线,实现加工过程(上料、加工、下料)的自动化、无人化。本设计能够应用到加工工厂车间,满足数控机床以及加工中心的加工过程安装、卸载加工工件的要求,从而减轻工人劳动强度,节约加工辅助时间,提高生产效率和生产力。
上下料;机械手设计;自动化
1 机械手结构设计
(1)总体设计。在本次设计中,设计要求搬运的加工工件的质量达8kg,长度达95mm,同时在工作中需要满足3种运动需求,其中手臂的伸缩和立柱升降为两个直线运动,另一个为机身的回转运动。综合考虑,机械手自由度数目取为3,坐标形式选择圆柱坐标形式,即一个转动自由度两个移动自由度。文章针对机械手的腰部、手抓以及液压系统这三个重要部分进行详细设计。
(2)机械手腰座结构设计。工业机械手腰座是指圆柱坐标机械手、球坐标机器手及关节型机械手的回转基座。腰座回转的驱动形式要么是电机通过减速机构来实现,要么是通过摆动液压缸或液压马达来实现。考虑到一般电机都不能直接驱动,同时转速以及扭矩的具体要求比较多,为了降低成本,机身回转机构这里也采用液压马达驱动。腰座具体结构如图1所示。

图1 腰座结构图
(3)机械手手爪的结构设计。机械手末端执行器俗称机械手手爪,是安装在机械手手腕上用来进行某种操作或作业的附加装置。楔块杠杆式手爪、滑槽式手爪、连杆杠杆式手爪、齿轮齿条式手爪、平行杠杆式手爪。本次设计选择的是齿轮齿条结构手爪。即通过活塞杆的直线运动与齿轮式手指啮合,转化为手指的张合运动。
(4)机械手液压驱动系统。液压系统在机械手中所起的作用是通过电——液转换元件把控制信号进行功率放大,对液压动力机构进行方向、位置、和速度的控制,进而控制机械手手臂按给定的运动规律动作。液压动力机构多数情况下采用直线液压缸或摆动马达,连续回转的液压马达用得很少。在工业机器人中,中、小功率的液压驱动系统用节流调速的为多,大功率的用容积调速系统。节流调速系统,动态特性好,但是效率低。容积调速系统,动态特性不如前者,但效率高。机器人液压驱动系统包括程序控制和伺服控制两类。
能实现摆动的驱动系统有很多,如电机驱动、马达驱动、齿轮齿条机构、摆动气缸等。步进电机驱动能实现精确控制,能实现精准的机身摆动,但控制比较困难,且容易受到外界的干扰。最主要的是笔者所设计的机械手都是用液压系统,如果转动部分应用电机,会增加成本,违背现代设计的原则。齿轮齿条驱动也能实现机身的旋转,但齿轮齿条也要有驱动部分,如电机、马达等,这也比较复杂。摆动气缸是气压元件,不适合本设计。而液压马达就相当于摆动液压缸,能很好的实现机身的摆动且有很强的动
力,完全满足本设计的要求,最主要的是与其他液压元件共同一起实现一个整体,控制起来更加方便,大大节省了设计及制造成本,体现了科技进步的要求。综上所述,本次设计实现机身摆动的元件选择液压马达。具体到本设计,在分析了具体工作要求后,综合考虑各个因素。机械手腰部的旋转运动需要一定的载荷动力,故采用液压摆动马达驱动来实现;因为采用液压执行缸来做水平手臂和垂直手臂,故大小臂均采用液压驱动。而手爪的张开和夹紧通过液压柱塞缸活塞与中间齿轮和扇形齿轮配合来实现,即手爪在柱塞缸推力作用下通过活塞杆端部齿条、中间齿轮及扇形齿轮使手指张开和闭合。
2 机械手控制系统的设计
2.1 系统总体方案
机械手的总体框图如图2所示,通过传感器收集的信号经过放大处理传入单片机中,连到各个事先设定好程序的引脚上,由单片机来控制电磁阀的开合,从而实现对液压缸伸缩的控制,或直接控制液压马达。
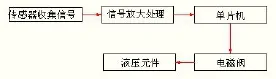
图2 机械手的伺服运动控制系统的系统框图
2.2 电路设计
单片机的许多应用都需要进行人机对话,键盘是解决计算机输入的简单手段;借此可以向计算机输入程序、置数、送达操作命令、控制程序的执行等等,人机交互接口采用键盘方式,本系统中采用SPI串行通信接口分时复用方式扩展键盘电路和显示电路。
(1)显示电路设计。显示部分采用共阴LED数码管,可对行程开关状态、操作数等进行显示。显示时采用串行口输出段码,用6个DPY7-SEGDP数码管。应用了型号为74HC138型号的译码器,可接受3位二进制加权地址输入。同时ULN2803型功率放大芯片为数码管显示电路提供了足够的功率。
(2)复位电路设计。复位电路的振荡启动定时器OST作用或输入为低时,单片机将保持复位状态。复位时,单片机状态被设定如下:振荡器工作或启动,包括电源上升启动或睡眠启动;I/O控制寄存器设定为全“1”,使所有的I/O引脚处于高阻状态(即输入态);程序计数器PC设为全“1”;状态寄存器F3的程序页面选择位(最高2位)清零。
(3)晶体震荡电路设计。石英晶体震荡的三个端口分别与PIC单片机的引脚OSC1/CLKIN、OSC2/CLKOUT以及运动控制芯片LM629N的CLK引脚相接。在单片机采用石英晶体振荡器时,所采用的电容器和产生的频率有所不同。电容值取大有利于震荡的稳定,但却会延长起振时间。文章选用高速(HS)振荡器,频率为8MHz,故PIC的指令周期为0.5,相应电容选择30PF。OSC1为单片机的振荡信号输入端,这个端用于外部震荡信号输入。
3 结语
文章所设计的是一个三自由度机械手,主要就是通过马达带动机身的摆动和液压缸实现机身的起降以及液压缸驱动手臂伸缩。本次设计在满足系统工艺要求的前提下,将机械手系统中相对独立的环节采用高性价比且相对简洁的结构形式和控制系统,采用模块化设计,大量采用标准化、模块化的通用元配件,从而使成本大为降低,具有显著的技术经济性。
Design of the Automatic up-down material M anipulator
CHEN Zhi-xiong
(Hubei Vocational and Technical College,Xiaogan,Hubei 432000,China)
At present,manufacturing industry in China is developing rapidly,more and more money are flowing into manufacturing,more and moremanufacturer take part inmanufacturing.The unmanned and automatic implementation process (feeding,processing,cutting)is realized bymainly combiningwith CNCmillingmachine to form a production line.This design can beapplied to the processing factoryworkshop,tomeet the needs in the processof installation and unloading ofmachining in processing centerand NCmachine,so as to reduce labor intensity,save processing auxiliary time,improve production efficiency and productivity.
up-downmaterial;manipulatordesign;automation
TP241
A
2095-980X(2016)08-0038-02
2016-07-14
陈志雄(1965-),男,湖北汉川人,大学本科,副教授,主要研究方向:机械设计、数控加工。
猜你喜欢
装备制造技术(2019年6期)2019-08-15
电子制作(2018年24期)2019-01-03
制造技术与机床(2018年11期)2018-11-23
河北农机(2017年12期)2018-01-20
荣誉杂志(2017年7期)2017-08-23
制造技术与机床(2017年4期)2017-06-22
小学生导刊(2017年15期)2017-05-17
棋艺(2016年4期)2016-09-20
中国塑料(2016年3期)2016-06-15
通信电源技术(2016年1期)2016-04-16
