
苹果分类包装搬运机械手控制系统的设计
2017-01-10 03:40张建平
时代农机 2016年8期
张建平
(辽宁农业职业技术学院,辽宁 营口 115009)
苹果分类包装搬运机械手控制系统的设计
张建平
(辽宁农业职业技术学院,辽宁 营口 115009)
文章以直径范围在70~100mm之间的苹果为研究对象,设计一种三自由度机械手来执行苹果分类与包装中的搬运动作,该机械手由气动方式驱动手部机构气缸、水平伸缩气缸、垂直升降气缸和旋转气缸来实现苹果的抓取和定位摆放功能。通过PLC方式实现对机械手动作的逻辑控制。
机械手;控制系统;PLC
1 苹果搬运机械手结构与工作流程
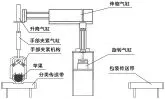
图1 苹果分类包装搬运机械手结构图
机械手的结构如图1所示。该机械手目的是将苹果从左侧分类传送带搬运到右侧包装传送带后进行包装,两个传送带之间高度一致,直线距离为470mm,所需机械手转动角度为110°,根据设计要求机械手能够完成夹紧控制、手臂水平伸缩控制、垂直升降控制和旋转控制。根据要求选择直线运动气缸来进行机械手的夹紧、水平伸缩和垂直升降运动;选择旋转气缸来进行机械手的旋转运动。其中手部夹紧机构选择双指式回转型滑槽式外夹持手部,其有适合的夹紧力、开闭角与抓取精度,手部指面填充有缓冲材质,增大摩擦力,并对苹果表皮进行了保护。
整个系统的工作流程如下:①输送:机械手复位,位于分类传送带(带沟槽)的正上方,分类传送带将待分类的苹果输送到机械手的工作半径上。②视觉识别:视觉识别系统按设定标准对苹果的尺寸大小和表面有无损伤进行识别,将检测信号反馈给执行部分。③机械手按指定的命令完成以下动作执行任务:垂直伸出→手部机构夹紧→垂直缩回→旋转右摆→水平前伸→垂直下降→手部机构松开→垂直缩回→水平缩回→旋转左移退回到原位,这一系列动作为一个工作流程机械手所需完成的动作。目的是把苹果从分类传送带搬运到包装传送带上。④包装机械对苹果进行包装。
2 气动系统设计
机械手气动系统原理如图2所示。

图2 机械手气动系统原理图
机械手的气动系统采用工作压力控制回路,气缸动作由电磁阀控制,各气缸的动作速度由单向节流阀控制,磁性开关的主要作用就是检查气缸活塞的位置移动情况,从而控制相应的电磁阀动作。设计中采用单、双向调速回路来实现控制系统,其中垂直气缸上升下降动作为单调速回路来控制的,其余气缸动作都是由双向调速回路来实现控制。
3 PLC控制系统设计
机械手控制分为自动和手动两种。自动过程执行前,首先按下“复位”按钮,机械手执行复位动作。然后按“开始”按钮后机械手按工作流程所示执行动作,机械手运行过程中,按“停止”按钮,机械手停止工作,再按“启动”按钮后机械手从断点处开始动作。手动程序就是用按钮单独操作实现位置的移动,手动的优点是分步骤进行、便于观察、增强了操作人员的操作性,使操作者对机械手的运动步骤更加熟悉,并免去了自动操作执行过程中因电磁阀故障而导致的实验中断。
本课题选用的是西门子公司S7-200系列PLC,其具有快速的中央处理运算能力、丰富的编程指令集、快速响应的数字量和模拟量输入/输出通道和强大的通信能力。根据机械手PLC控制系统的I/O口分配、通信口、供电能力等因素,选择S7-200系列CPU226 AC/DC/RLY型可编程控制器。其I/O分配及外围接线如图3所示。
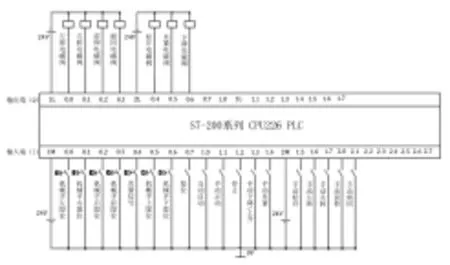
图3 机械手工作PLC外围电路接线图
最后采用西门子的STEP7-Micro/WIN32软件,利用逻辑流程方法编制的PLC控制程序,其算法逻辑思路清晰,便于分析控制程序、查找故障点,调试程序和修改程序。
4 结语
文章阐述的机械手不仅可以用于对苹果的搬运,它还可以通过改变硬件条件来满足不同种类水果分类工作,对于系列化产品的搬运机械手控制系统开发,具有普遍意义。
[1]赵波,王宏元.液压与气动技术[M].北京:机械工业出版社,2015.
[2]李太胜.基于PLC控制的工业机器人系统的研究与实现[J].中国高新技术企业,2014,(15):26-27.
Design of the M anipulator Control System in Classification Packaging and Carrying of App les
ZHANG Jian-ping
(Liaoning Agricultural Vocational and Technical College,Yingkou,Liaoning 115009,China)
Taking theappleswith the diameter in the rangeof70~100mm as the research object,thisarticle is to design a3-DOFmanipulator to perform themovementsin processof the classification and packingofapples.Thehandmechanism cylinder,horizontal telescopic cylinder,vertical lifting cylinder and rotating cylinder are driven by thismanipulator in a pneumatic way cylinder toachieve the functionsofcapturingand positioningofapples.The logicalcontrolofthemanipulator isrealized by theway ofPLC.
manipulator;controlsystem;PLC苹果采摘后的分类包装需耗费大量的人力,水果分类自动化的实现已成为目前亟待解决的关键问题。因此,开展对苹果分类包装搬运的小型机械装置研究不仅有利于降低劳动强度、提高作业效率,同时对于推动我国农业产业分类机械化、自动化和智能化具有重要现实意义。
TP241
A
2095-980X(2016)08-0042-01
2016-07-14
张建平(1985-),男,辽宁海城人,大学本科,助教,主要研究方向:工业机器人。
猜你喜欢
实用手外科杂志(2022年2期)2022-08-31
中学生数理化·高一版(2021年1期)2021-03-19
制造技术与机床(2018年11期)2018-11-23
河北农机(2017年12期)2018-01-20
制造技术与机床(2017年4期)2017-06-22
中学教学参考·理科版(2016年11期)2017-06-08
通信电源技术(2016年1期)2016-04-16
实用手外科杂志(2015年4期)2015-08-27
中华皮肤科杂志(2014年4期)2014-12-19
中国药业(2014年21期)2014-05-26
