
硅微陀螺带通ΣΔ闭环检测环路设计*
2017-02-07 09:38祝云峰吴志强朱欣华
传感技术学报 2017年1期
祝云峰,吴志强,朱欣华,苏 岩
(南京理工大学MEMS惯性研究中心,南京 210094)
硅微陀螺带通ΣΔ闭环检测环路设计*
祝云峰,吴志强,朱欣华,苏 岩*
(南京理工大学MEMS惯性研究中心,南京 210094)
本文研究了SDM调制器在陀螺闭环检测中的应用,主要针对其闭环检测的结构设计和参数获取作了相应的研究和阐述。硅微机械陀螺敏感模态为二阶模态,基于SDM调制器的设计原理,结合DSToolbox来设计整个闭环检测电路,得到闭环检测电路的结构和参数。最终仿真得到的闭环检测系统的信噪比达到了106 dB。在量程为±200 °/s,带宽为200 Hz时,分辨率可以达到0.001 °/s。
硅微陀螺仪;闭环检测;sigma delta调制器;参数获取;信噪比
7630本研究以硅微陀螺(SMG)[1-2]高阶带通Sigma-Delta调制器(SDM)为研究对象,重点研究机电结合SDM的设计方法,为硅微陀螺检测回路的ASIC化、批量化生产提供方法和技术基础。
目前国内的硅微陀螺的检测电路多为开环检测[3-5],而少数的带通SDM闭环检测电路都为连续时间SDM设计[6],连续时间SDM设计过程复杂,电路参数无法进行在线修改,无法满足ASIC化和批量化生产的要求,而国外对于机电结合带通SDM的ASIC闭环结构优化设计及参数获取方法的技术进行保密[7-9],所以本研究以最终得到模数混合闭环检测电路的信噪比(SNR)为设计指标,对闭环检测电路结构的建立和环路参数的获取方法进行了研究,最后通过仿真验证了所得到的结构和参数满足预期的性噪比要求,从而验证了获取方法的准确性。
1 硅微陀螺仪结构及工作原理
本文所研究的硅微陀螺仪的结构简图如图1所示,是一种典型的Z轴科里奥利陀螺仪。X轴方向为其驱动轴向,和驱动接口电路配合后构成振荡环路,提供产生科里奥利力的速度基准信号。Y轴方向为其检测轴向,通过科里奥利力引起的检测极板间电容的变化来检测Z轴方向的输入角速度,同时两检测极板构成差分输出。

图1 硅微陀螺结构示意图
2 SMG的ΣΔ闭环检测电路的建模
2.1 陀螺的离散化
从动力学角度看,图1所示的音叉陀螺的敏感模态可被看作是一个二阶质量-弹簧-阻尼系统,其敏感模态的传递函数可以表示为:
(1)
利用变换,可以得到传递函数的离散化模型:
(2)
式中:T为采样周期,可以转化为
的形式,其中λ=2-2cos(ωdTs)。
所以陀螺的结构可在离散域中表示,如图2所示。

图2 陀螺的离散化模型

图3 机电结合SDM闭环检测的示意图
2.2 SMG的ΣΔ闭环检测电路的建模
下图是机电结合SDM闭环检测的示意图,机电结合SDM的前馈通道中包括陀螺敏感结构、SMG的电容/电压(C/V)转换电路、模数转换器(ADC)、数字谐振器、补偿环节和一位量化器等几部分组成,最后通过极板上实现力反馈闭环[10],示意图中即为Kvfs来表示,得到力反馈闭环检测电路。该平台采用FPGA实现图3虚线框内的所有功能,包括数字谐振器和一位量化器。上位机可以通过接口对FPGA的实现结构和参量进行在线修改,因此后续研究得到的优化环路结构和闭环参数可以方便地在该平台上实现并进行验证。
3 针对SMG的离散时间带通SDM的结构和参数
3.1 结构的设计
关于离散时间SDM[11-12]的设计已经有很成熟的方法。现在首先需要做的就是结合陀螺的结构参数,以及设计指标来获取适合于陀螺检测电路的离散时间SDM参数。
一阶SDM调制器由一个积分器加一个DAC反馈的形式组成,而高阶SDM调制器最基本的结构则有多个积分器组成,使得可以对量化噪声进一步整形。单环SDM设计中有分布式反馈的结构和分布式前馈的结构,由于我们在实际的闭环检测中采用力反馈的形式,反馈作用点只能设置在陀螺的输入端,所以采用多路前馈的结构较为合理。为了保证稳定性,每级积分器后面加一级前馈系数,输出即为每级积分器不同的权重相加,得到量化器的输入信号并产生反馈信号,如图4所示。

图4 加权反馈求和的积分器链构成的调制器
现在对环路滤波器进行分析[13],即为从信号输入X到量化器输入之间的开环传递函数Hs(Z),由于每一级的积分器的极点都在Z=1处,这样得到Hs(Z)的极点也全部在Z=1处,
环路滤波器的极点在噪声传递函数NTF中即表现为零点,而NTF的幅频响应则关系到整个系统对噪声的整形效果。
如果NTF的零点全部位于Z=1处,则低频下的噪声衰减将非常显著,在OSR较大的时候,即可获得最佳的噪声整形,此时可以得到一个很好的低通的SDM的结构。
但由于信号的中心频率并不在零频率处,当需要设计一个带通的结构时候,需要将最佳的噪声整形频率点设计到信号频率点处。所以可以将Hs(Z)的极点从Z=1处移到Z平面单位圆上的共轭复数位置上,极点位置的选择应该使得环路传输在所需的频率处提供最大的环路增益值,即为谐振频率点处。
利用局部负反馈可获得复共轭极点,如图5所示四阶的SDM结构中,对前两级积分器和后两级积分器分别采用负反馈电路,系数分别为g1和g2,即为得到的CRFF调制器结构。所以可以得出结论,可以通过调节零点优化参数g1和g2参数的大小使得环路滤波器工作在陀螺的谐振频率wd处,达到带通的目的。

图5 局部负反馈产生复共轭零点的带通调制器
前两级积分器加局部负反馈系数组成的回路传递函数为:
(3)
式(2)陀螺的离散化模型的谐振频率点即为wd,所以当g1=λ=2-cos(ωdTs)的时候,离散化SDM的前两级积分器加局部反馈的模型就可以由陀螺的二阶系统来代替,而且此时的系统的极点就在陀螺的谐振频率wd处。
在具体的硬件实现中,可以将前馈支路a1的前馈点往后移动,得到一个完整独立的陀螺二阶结构系统。其中g1的系数即为2-2cos(ωdTs)调用dstoolbox工具箱,选择CRFF结构作为设计参考,设定设计条件,采用零点优化的方法进行参数的获取,可以得到g1的参数和之前设计值相符,同时可以得到其他前馈系数的参数。从而完成了在离散域中参数的设计。
暂时先不考虑在实际陀螺结构中的Kcv,Kvf等系数,在离散时间系统中暂时设为1,等到后面结合陀螺的参数进行系数的调节即可。
“不焚烧秸秆,不砍伐树木,生产出来的板材不含甲醛,让千家万户百姓都受益。”说起利用秸秆板材制造家具,荆门万华生态家居有限公司总经理党鹏说,作为目前全球规模最大的零甲醛秸秆板材生产企业,公司自主研发生产的以“禾香”为品牌的零甲醛人造板获得国内外市场的认可。
3.2 参数的获取
通过和课题组之前开环的检测陀螺性能相比,本基金项目初步设计了陀螺预期的检测性能指标:分辨率为0.001 °/s,量程为正负200 °/s。后期可以通过提高过采样率来进一步提高检测系统的性能,本文只是提供了一种设计SDM闭环检测环路的思路和方法。因为陀螺的输出噪声决定了其分辨率的大小[14],有公式:
SNRmin=20log(200/0.001)=106 dB
从上述的讨论以及实际陀螺的性能我们可以获得以下的设计条件和初始参数。
带通,信号输入频率为4 K,阶数定义order为四阶,过采样率初始设为256,闭环系统的带宽设为200 Hz,带外增益Hinf=1.3,形式为‘CRFF’。可以预先得到g1的系数:2-2cos(ωdTs)。
可得以采样率为1,则信号归一化频率为
f0=4K/(400×osr)
采用零点优化的设计方式,然后利用离散时间SDM工具箱进行设计可以得到前馈系数的参数:
a=0.4083 0.1022 0.0204 -0.0034
从而完成了整个离散系统的设计,并对SDM进行频谱仿真和分析,因为信噪比随着输入幅值的不同会导致结果也不同。通过图6中的输入幅值和信噪比的仿真图可以看出,当输入幅值到一定值的时候,信噪比会急剧下降,这说明输入并不能达到满幅输入,此时调制器的量程即为正负1.2 dB,大约为0.87。所以这里的量程输入对应到陀螺的实际输入正负200 °/s。

图6 OSR=256时信噪比与输入幅值的大小的关系

图7 OSR=256时输入为4 kHz的正弦波信噪比

图8 OSR=512时NTF零极点图和信号、噪声传递函数
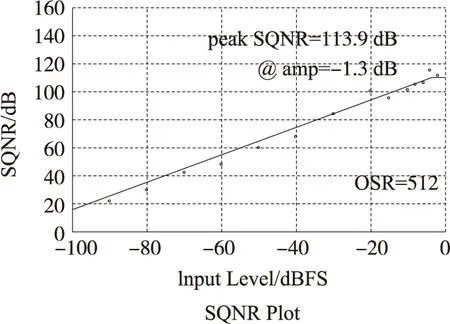
图9 OSR=512时信噪比与输入幅值的大小的关系

图10 OSR=512时输入为4 KHZ的正弦波信噪比
从零极点图中可以看到系统的极点全部位于单位圆内,系统是稳定。而且可以看到系统的零点都位于单位圆上的共轭复数根处,即为陀螺的谐振频率点处。而且此时得到的信噪比最大值的输入可以看到位于输入幅值为-1.3 dB处,跟之前一样,最后留有一定的裕度。设定输入为-3 dB处,最后得到信噪比为110.6 dB。
至此完成了在离散时间的SDM的设计,具体到实际中机电带通SDM的实现还需要从离散时间到连续时间的SDM的转化。
4 离散时间SDM到机电结合SDM的转换
SDM的最初的发展中都是以离散时间SDM的结构作为研究对象的,所以关于离散时间SDM的参数的获取有很成熟的工具,而s域中的设计则没有相应的设计工具,所以可以采用从离散域的SDM到连续域的SDM转换的方式来设计机电结合的sigma-delta结构。
离散时间SDM的形式:

图11 离散时间SDM的形式
连续时间域的SDM形式:

图12 连续时间域的SDM形式
连续时间(CT)调制器将连续时间与采样数据的分界点移动到反馈电路中,如上图所示,可知,离散时间的SDM假定采样在调制器之前已经完成,使得整个处理过程完全在离散域中完成;相反,连续时间调制器在环路滤波器之后进行采样,环路滤波器是连续时间的,采用s域的传递函数。另外DAC的输出被认为是连续时间的,所以
其输出模型是一个采样保持器,其拉氏变换表达式为:
从离散时间到连续时间SDM的转换应保证转换之后两者具有相同的噪声传递函数,即为对量化噪声具有相同的抑制作用。所以应该使得噪声εQ(Z)到输出的闭环传递函数相等,从结构中可以看出,即为保证开环的传递函数相等即可。
HS(Z)=Z{HC(S),Hdac(S)}
在纯电SDM设计中可以用此方法来设计连续时间SDM,即为保证HC(S)满足上面的表达式。但是在机电结合陀螺中,陀螺的结构是确定的,在机电结合中前两级积分器为陀螺的敏感结构的传递函数,为S域的传递函数,而后两级积分器需要在数字域中实现,为Z域的传递函数。现在需要把离散时间SDM的前两级积分器用陀螺的连续结构来代替,所以就需要使得现在需要把陀螺的二阶结构用在四阶的离散时间SDM中,所以需要对陀螺的二阶系统进行离散化。
Hg(S)为陀螺的二阶传递函数,假设后两阶的传递函数为HS(Z),最后实际的结构为:
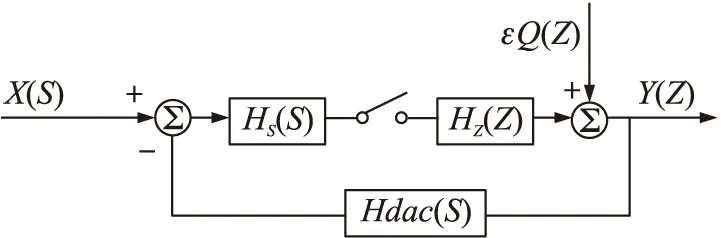
图13 机电结合SDM形式
所以在实际的机电结合SDM结构中,从Z域到S域的转换的时候,需要满足
HS(Z)=Z{HS(S),Hdac(S),Hz(Z)}
才能保证最后得到的噪声传递函数是一致的,即对噪声的抑制能力相同。
然后是对结构的调整,上述表达式中HS(Z)是不变的,而HS(Z),Hdac(S)由于一个是保持器的递函数,一个是陀螺的二阶系统,所以也是不变的,所以要保持一致,可以改变后面的离散域的传递函数。
其中Z{HS(S),Hdac(S)}可以直接用MATLAB得到,即为得到陀螺的零阶保持器模型下的离散化模型。得到的模型跟实际的采样率有关。
而原先的模型结构为:
所以可以得到最后的:
5 仿真验证
最后得到机电结合SDM在simulink中的实际模型如图14所示,其中陀螺的结构表示为S域的表达式。
然后将陀螺的检测电路的实际系数加入到系统中,满幅输入为200 °/s(对应离散模型的0.7的幅值输入),然后对simout的输出进行频谱分析,可得频谱图如图15所示。

图14 结合陀螺的机电结合SDM的simulink仿真

图15 量化器输出的频谱图分析
对量化输出进行分析,从最终得到的PSD结果可以看出在陀螺的谐振频率处的幅值最大,此处代表的即为输入信号的幅值。而此时的噪声模型被推到了远离谐振频率点的频段,达到了噪声搬移的目的,使得带宽内的量化噪声大大减小,从而达到提高带宽内的信噪比的目的。
在MATLAB中进行计算可以得到仿真的信噪比为108.5 dB。满足要求,验证了上述获取陀螺闭环检测SDM参数方法的正确性。
6 结论
本文提供了一种机电结合SDM闭环检测电路的结构设计以及参数获取的方法。如何根据陀螺的结构参数来设计检测系统的结构和参数,保证闭环的稳定性以及满足所要求的预期性能,是本文主要做的工作。文章中没有考虑环路中其他的噪声[15],在实际电路得到的信噪比要低于仿真所得的结果。所以后期如果要在实际电路中进一步提高检测系统的性能,可以在保证系统稳定的前提下,进一步提高过采样率。
[1] 刘宇. 固态振动陀螺与导航技术[M]. 北京:中国宇航出版社,2010.
[2] 殷刚毅. MEMS器件IP库及系统应用[J]. 传感技术学报,2005,18(4):886-889.
[3] Seeger J,Lim M,Nasiri S. Development of High-Performance,High-Volume Consumer MEMS Gyroscopes[C]//Solid-State Sensors Actuators Microsystems Workshop,2010:61-64.
[4] Balachandran Ganesh K,Petkov Vladimir P,Mayer Thomas. A 3-Axis Gyroscope for Electronic Stability Control with Continuous Self-Test[J]. Solid-State Circuits Conference-(ISSCC),2015 IEEE International,2015:22-26.
[5] 赵阳,裘安萍,施芹,等. 微机械陀螺检测接口建模及前置放大器优化[J]. 光学精密工程,2013,21(7):1734-1740.
[6] Chen Fang,Yuan Weizheng,Chang Honglong. Design and Implementation of an Optimized Double Closed-Loop Control System for MEMS Vibratory Gyroscope[C]//Sensors Journal,IEEE,,2014,14(1):184.
[7] Sharma A,Zaman M F,Ayazi F. A 104 dB SNDR Transimpedance-Based CMOS ASIC Fortuning Fork Micro Gyroscopes[C]//IEEE Custom Integrated Circuits Conference,2006:655-658.
[8] Ezekwe C D,Boser B E. A Mode-Matching ΣΔClosed-Loop Vibratory Gyroscope Readout Interface With a 0.004 /(s·√Hz) Noise Floor over a 50 Hz Band[J]. IEEE Journal of Solid-State Circuits,2008,43(12):3039,3048.
[9] Raman J,Cretu E,Rombouts P. A Closed-Loop Digitally Controlled MEMS Gyroscope with Unconstrained Sigma-Delta Force-Feedback[J]. Sensors Journal,IEEE,2009,9(3):297,305.
[10] 杨亮,苏岩,裘安萍. 脉冲密度反馈对力平衡微机械陀螺的影响[J]. 光学精密工程,2013,22(8):2087-2094.
[11] Schreier R,Temes G C. Understanding Delta-Sigma Data Converters[M]. IEEE pressPiscataway,NJ,USA,2005.
[12] 程剑平. 带通Σ-Δ调制器的研究和设计[D]. 南京:东南大学,2006.
[13] 胡寿松. 自动控制原理[M]. 北京:科学出版社,2012:1-300.
[14] 杨亮. 硅微机械陀螺数字化测控技术研究[D]. 南京:南京理工大学,2013.
[15] 杨波,王寿荣,扶文树. 硅微陀螺仪驱动信号提取端口噪声分析[J]. 传感技术学报. 2009,22(9):1293-1297.
Bandpass ΣΔ Closed-Loop Detection Circuit Design of Silicon Micro Gyroscope*
ZHUYunfeng,WUZhiqiang,ZHUXinhua,SUYan*
(MEMS Inertial Technology Research Center,Nanjing University of Science and Technology,Nanjing 210094,China)
The paper has studied the application of sigma-delta modulator in the detection circuit of silicon gyroscope,mainly on the choice of the structure and the obtaining of the parameters for the detection circuit. The sensitive modal of the gyro is a second order system,the research has designed a closed-loop detection circuit based on the principle of SDM modulator,and then get the structure and parameters combining DSToolbox. Finally got a closed-loop detection system for gyro which can reach a signal-to-noise ratio to 106 dB. When the range is ±200 °/s and bandwidth is 200 Hz,the resolution can reach 0.001 °/s.
Silicon microgyroscope;Sigma delta modulator;parameters obtaining;scale factor;SNR

祝云峰(1991-),男,浙江衢州人,硕士,于2014年在西北工业大学获得学士学位,现于南理工mems实验室攻读硕士学位,研究生阶段主要从事MEMS惯性传感技术的硬件电路等方面的研究,870828004@qq.com;吴志强(1982-),男,山东泰安人,博士,讲师,分别于2006年、2012年在西北工业大学获得硕士学位、博士学位,主要从事MEMS惯性传感技术、惯导系统等方面的研究,wuzhiqiang@njust.edu.cn; 朱欣华(1963-),男,教授,博士,主要研究方向为导航制导与控制、嵌入式系统与应用、MEMS惯性技术,zhux-inhua@mail.njust.edu.cn;苏 岩(1967-),男,江苏苏州人,博士,教授,博士生导师,分别于1996年、2001年在东南大学获得硕士、博士学位,主要从事MEMS传感器技术研究,suyan@njust.edu.cn。
项目来源:国家自然科学基金项目(61301214)
2016-06-14 修改日期:2016-08-29
TH824
A
1004-1699(2017)01-0088-06
C:7630
10.3969/j.issn.1004-1699.2017.01.017
猜你喜欢
科教导刊·电子版(2022年5期)2022-03-19
小学生学习指导(低年级)(2019年10期)2019-10-16
学生天地(2019年6期)2019-03-07
军事文摘(2018年24期)2018-12-26
测控技术(2018年7期)2018-12-09
通信电源技术(2018年5期)2018-08-23
快乐语文(2018年36期)2018-03-12
光学精密工程(2016年4期)2016-11-07
电测与仪表(2016年24期)2016-04-12
电测与仪表(2015年6期)2015-04-09
